一种全向移动机器人导航过程中的脱困方法与流程
本发明涉及一种全向移动机器人导航过程中的脱困方法,属于移动机器人路径规划。
背景技术:
1、移动机器人导航避障过程中,由于环境障碍物过多或碰到突然出现的障碍物时,通常为避免碰撞进入停障状态。此时移动机器人需要从环境中脱困,继续执行原导航任务。当前缺少一种可靠的脱困方法。
技术实现思路
1、本发明目的是提供了一种全向移动机器人导航过程中的脱困方法,充分利用机器人的全向移动能力,根据环境中障碍物的分布特点,有效解决移动机器人在复杂环境中容易陷入停障状态导致导航任务无法执行的问题。
2、1)机器人采用纯跟踪算法跟踪规划路径;
3、2)机器人按照规划轨迹行驶过程中进入停障状态后,开始计算停止时长;若在t时刻内退出停障状态,继续执行原导航任务,直至任务结束;若停止时长大于t,则执行脱困任务;
4、3)执行脱困任务时机器人首先读取激光雷达及超声波的传感器数据,获取当前障碍物信息,根据障碍物信息规划脱困轨迹;
5、4)采用纯跟踪算法跟踪绕开障碍物的轨迹,直至到达原跟踪点,此时机器人继续执行原导航任务,直至任务结束。
6、优选的,在步骤1)中,机器人具备包括横向移动和自转运动的全向移动能力。
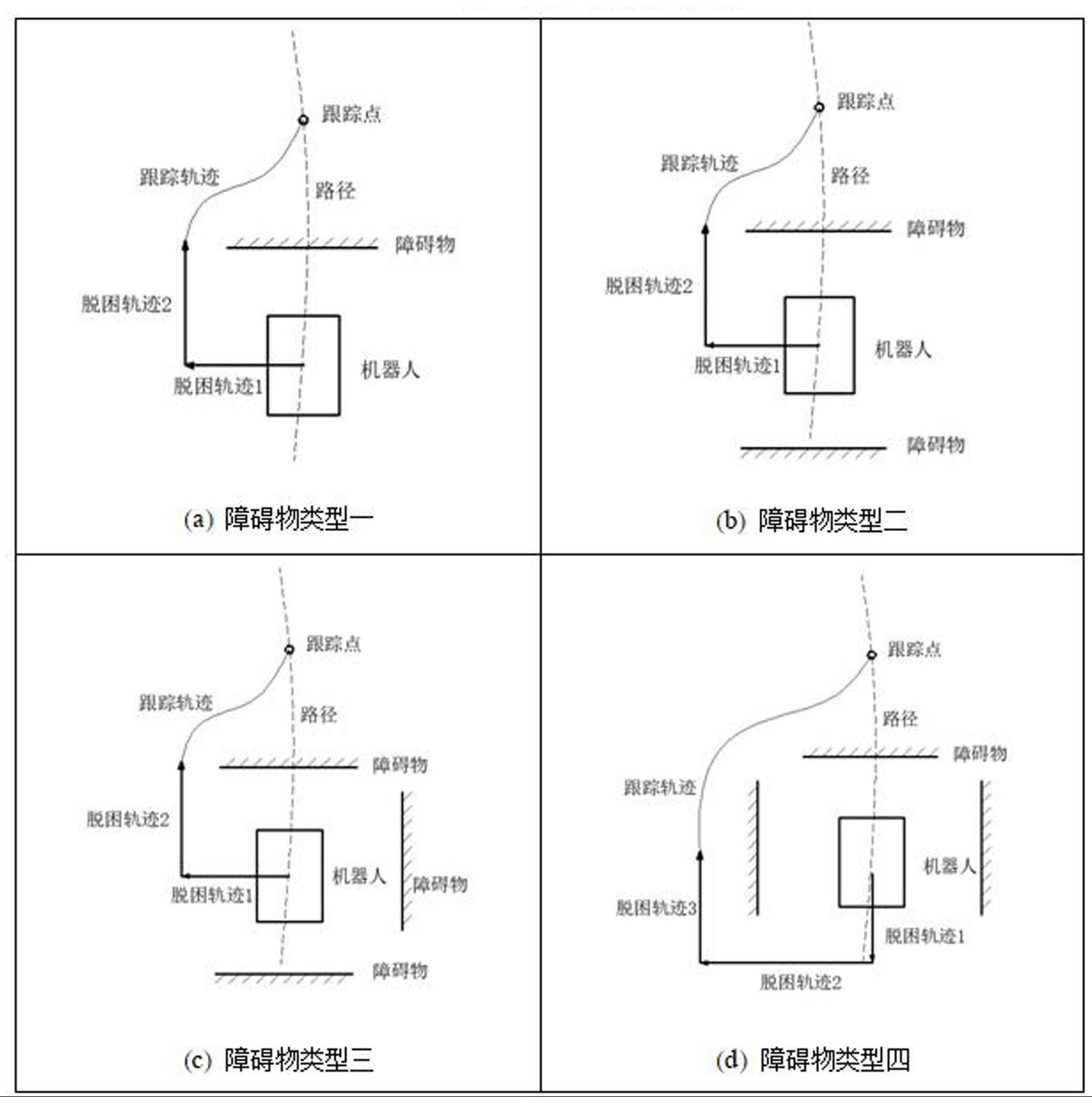
7、优选的,所述步骤3)具体步骤如下:
8、3-1)根据激光雷达和超声波雷达的数据,判断障碍物的类型;
9、3-2)若只有前方存在障碍物或只有一侧存在障碍物,机器人规划一条横移轨迹绕开障碍物;
10、3-3)若前方和两侧都存在障碍物,机器人规划一条先后退再横移的轨迹绕开障碍物。
11、本发明的优点在于:本发明能够克服现有技术的缺点和不足,充分利用机器人的全向移动能力,根据环境中障碍物的分布特点,有效解决移动机器人在复杂环境中容易陷入停障状态导致导航任务无法执行的问题。
技术特征:
1.一种全向移动机器人导航过程中的脱困方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种全向移动机器人导航过程中的脱困方法,其特征在于,在步骤1)中,机器人具备包括横向移动和自转运动的全向移动能力。
3.根据权利要求1所述的一种全向移动机器人导航过程中的脱困方法,其特征在于,所述步骤3)具体步骤如下:
技术总结
本发明提供了一种全向移动机器人导航过程中的脱困方法。该方法包括:机器人采用纯跟踪算法跟踪路径过程中由于障碍物影响导致无法移动;机器人判断自身进入停障状态并计时;计时超过阈值时读取激光雷达及超声波的传感器数据,获取当前障碍物信息;根据障碍物类型,规划一条脱困轨迹;依据脱困轨迹运动,直至能够无碰撞的跟踪原跟踪点,继续原导航任务。本发明能够克服现有技术的缺点和不足,充分利用机器人的全向移动能力,根据环境中障碍物的分布特点,有效解决移动机器人在复杂环境中容易陷入停障状态导致导航任务无法执行的问题。
技术研发人员:董锐,高钦发,马辰
受保护的技术使用者:山东新一代信息产业技术研究院有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!