一种电动飞行汽车系统及自适应容错控制方法
本发明涉及自适应容错控制,尤其是涉及一种电动飞行汽车系统及自适应容错控制方法。
背景技术:
1、电动飞行汽车是一种新概念交通工具,在路况较好的情况下,作为汽车在路面上行驶,在遇到障碍物时可暂时越障碍飞行。在电动飞行汽车进行飞行时,需要时刻根据当前的飞行姿态调整前后风扇的输出转速及转矩,实现车辆在空中平衡,防止车辆发生侧翻和滚转。同时电动飞行汽车在队列行驶的时候,头车与尾随车辆需要保持相同的速度,防止前后发生碰撞。
2、但是上述内容的实现需要不同的车辆之间通过控制器进行实时的通讯,而目前的车辆队列控制存在执行器时变故障、通讯障碍的问题,这些问题阻碍了队列车辆自动驾驶的技术实现。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在车辆队列控制存在执行器实变故障、通讯障碍的缺陷而提供一种电动飞行汽车系统及自适应容错控制方法。
2、本发明的目的可以通过以下技术方案来实现:
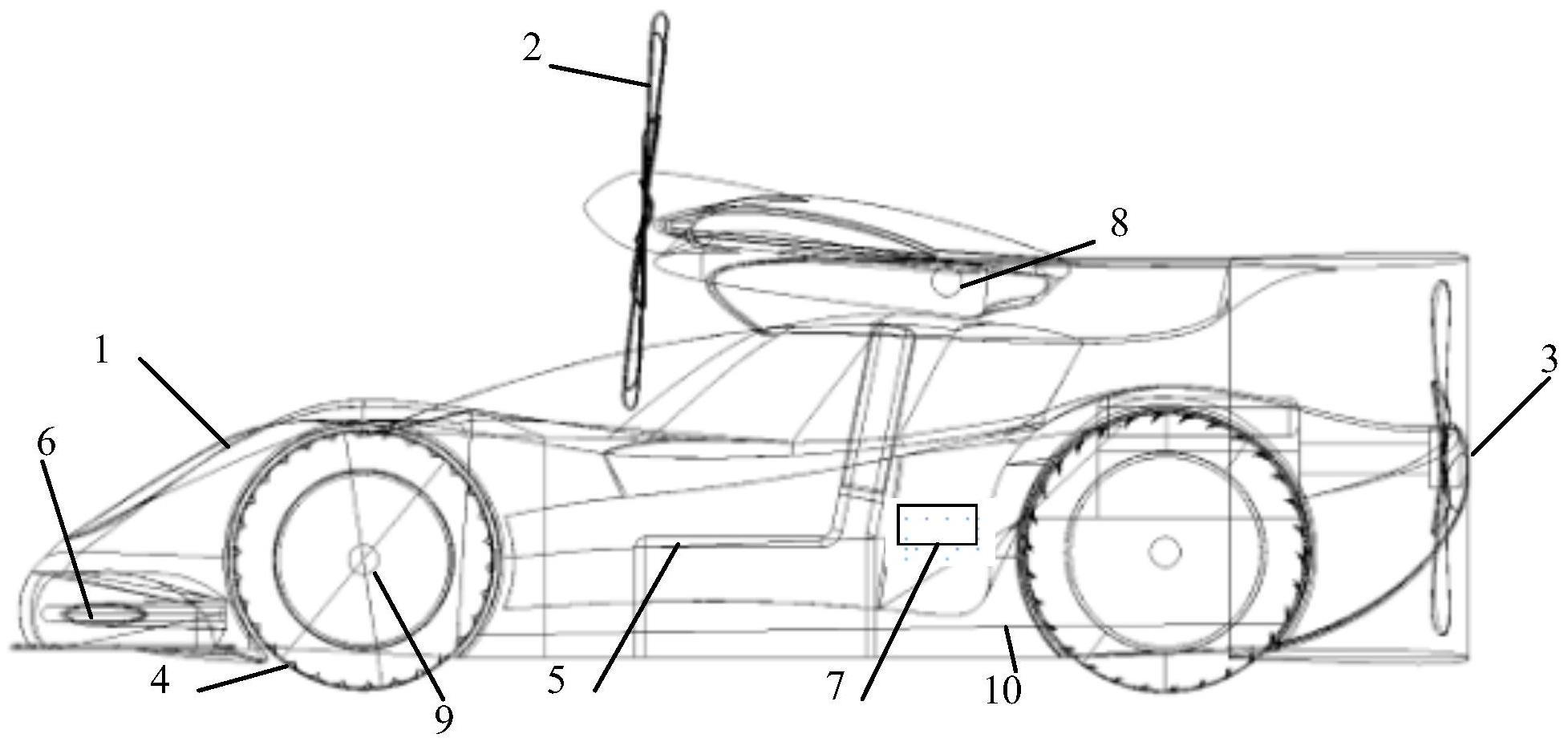
3、一种电动飞行汽车系统,包括飞行汽车本体、第一推进风扇、第二推进风扇、车轮、一致性容错控制模块、轮毂电机和动力电池部件;
4、所述第一推进风扇固定在飞行汽车本体的上方,所述第二推进风扇固定在飞行汽车本体的尾部,所述车轮的数量为多个,各个车轮固定在飞行汽车本体的两侧,所述轮毂电机的数量为多个,各个轮毂电机对应驱动连接各个车轮,所述一致性容错控制部件位于飞行汽车本体的中部;所述一致性容错控制部件包括传感模块、通讯模块和主控模块,所述主控模块连接动力电池部件的管理系统、轮毂电机的控制器、传感模块和通讯模块,所述第二推进风扇用于提供推力,实现车辆的飞行,所述第一推进风扇控制飞行汽车本体转向,调整飞行汽车本体的飞行姿态。
5、进一步地,所述动力电池部件为磷酸铁锂电池、三元材料电池、钠离子电池、混合固液电池、全固态电池、锂硫电池或锂金属电池。
6、进一步地,所述一致性容错控制部件还包括安全模块和主控模块,所述安全模块对整车关键零部件进行健康管理和故障诊断,所述主控模块连接动力电池部件的管理系统以及轮毂电机的控制器,所述传感模块包括激光雷达、毫米波雷达、摄像头和车辆姿态传感器。
7、进一步地,所述车辆姿态传感器包括速度监测单元、高度监测单元、位置监测单元和陀螺仪。
8、如图7所示,一种电动飞行汽车的自适应容错控制方法,包括以下步骤:
9、步骤1、构建多智能体系统,该多智能体系统包括领导者系统和跟随者系统,获取多智能体系统的动力学方程;
10、步骤2、获取领导者系统与跟随者系统的通讯图,构建分布式观测器;
11、步骤3、基于分布式观测器构建自适应容错控制器,通过自适应容错控制器求解多智能体闭环系统的解。
12、进一步地,步骤1中所述跟随者系统的表达式为:
13、yi=pi,ei=yi-y0
14、其中,pi、qi分别是第i个跟随者系统的位置和速度的状态量,bi是常数,ωi(t)是外部扰动,ui、yi、ei分别是第i个跟随者系统的控制输入、测量输出和误差输出。
15、进一步地,步骤1中所述领导者系统的表达式为:
16、y0=χ(v)
17、其中,y0∈rq是外部系统的输出,ψ(·)、χ(·)分别是平滑且在原点处为0的函数。
18、进一步地,步骤2中分布式观测器的信号ηi采用了自身信息ηi和邻居信息ηj确定,所述分布式观测器的动力学方程为:
19、
20、其中,邻接矩阵中的权值常数aij的值由通讯图决定,γij是观测器的增益,ρi(·)是一个充分光滑的非递减正函数,ψ(·)为充分平滑且在原点处为0的函数。
21、进一步地,步骤3中自适应容错控制器的表达式为:
22、
23、其中,n(ki)是nussbaum函数,ki是自变量,k2i、βi、δi、是正常数,i=1,…,n;sgn(·)是符号函数,为中间变量;为过滤后跟踪误差,其表达式为:其中,ci是正常数,
24、所述中间变量满足:
25、
26、其中,k1i是正常数,其中,是的第l列元素,1≤l≤n。
27、进一步地,步骤3中多智能体闭环系统的动力学方程为:
28、
29、
30、
31、
32、
33、其中,i=1,…,n,是使用观测器信号得出的误差,是的微分,是的微分,qi是速度,是观测器输出χ(ηi)的微分,是的微分,变量σi(t)=bihi(t),bi是正负号未知的常数,hi(t)为第i个系统中执行器的健康因子,n(ki)是nussbaum函数,ki是自变量,k2i、βi、δi、是正常数,φi(t)为第i个系统中执行器的偏置故障,ωi(t)是外部扰动,为中间变量,为过滤后跟踪误差,是未知有界的正常数∈i的估计量,是未知有界的正常数的估计量。
34、与现有技术相比,本发明具有以下优点:
35、(1)本方案通过车轮助跑后,由第二推进风扇提供推力,实现车辆的飞行,并结合第一推进风扇控制车辆转向,调整车辆的飞行姿态,同时配备的一致性容错控制部件能够对飞行汽车本体的位置状态等信息进行采集,同时能够实现对云端数据中心及队列其他车辆的实时通讯。能够有效解决不同车辆之间的联系障碍的问题,为飞行车辆组成的多智能体系统自适应容错控制奠定了基础。
36、(2)本方案通过构建自适应容错控制器,通过观测器在线解决了电动飞行汽车间通信障碍的问题,进一步解决了电动飞行汽车间基于分布式自调节观测器的一致性容错控制问题;引入nussbaum函数到控制器中解决了控制方向未知的问题,执行器遭受的时变故障和系统中的时变扰动能够被自适应估计。
技术特征:
1.一种电动飞行汽车系统,其特征在于,包括飞行汽车本体(1)、第一推进风扇(2)、第二推进风扇(3)、车轮(4)、一致性容错控制模块(7)、轮毂电机(9)和动力电池部件(10);
2.根据权利要求1所述的一种电动飞行汽车系统,其特征在于,所述动力电池部件(10)为磷酸铁锂电池、三元材料电池、钠离子电池、混合固液电池、全固态电池、锂硫电池或锂金属电池。
3.根据权利要求1所述的一种电动飞行汽车系统,其特征在于,所述一致性容错控制部件(7)还包括安全模块和主控模块,所述安全模块对整车关键零部件进行健康管理和故障诊断,所述主控模块连接动力电池部件(10)的管理系统以及轮毂电机(9)的控制器,所述传感模块(6)包括激光雷达、毫米波雷达、摄像头和车辆姿态传感器。
4.根据权利要求1所述的一种电动飞行汽车系统,其特征在于,所述车辆姿态传感器包括速度监测单元、高度监测单元、位置监测单元和陀螺仪。
5.一种电动飞行汽车的自适应容错控制方法,其特征在于,包括以下步骤:
6.根据权利要求5所述的一种电动飞行汽车的自适应容错控制方法,其特征在于,步骤1中所述跟随者系统的表达式为:
7.根据权利要求5所述的一种电动飞行汽车的自适应容错控制方法,其特征在于,步骤1中所述领导者系统的表达式为:
8.根据权利要求5所述的一种电动飞行汽车的自适应容错控制方法,其特征在于,步骤2中分布式观测器的信号ηi采用了自身信息ηi和邻居信息ηj确定,所述分布式观测器的动力学方程为:
9.根据权利要求5所述的一种电动飞行汽车的自适应容错控制方法,其特征在于,步骤3中自适应容错控制器的表达式为:
10.根据权利要求9所述的一种电动飞行汽车的自适应容错控制方法,其特征在于,步骤3中多智能体闭环系统的动力学方程为:
技术总结
本发明涉及一种电动飞行汽车系统及自适应容错控制方法,包括飞行汽车本体、第一推进风扇、第二推进风扇、车轮、一致性容错控制模块、轮毂电机和动力电池部件;所述第一推进风扇固定在飞行汽车本体的上方,所述第二推进风扇固定在飞行汽车本体的尾部,所述车轮的数量为多个,各个车轮固定在飞行汽车本体的两侧,所述轮毂电机的数量为多个,各个轮毂电机对应驱动连接各个车轮;所述一致性容错控制部件包括传感模块、通讯模块和主控模块,所述主控模块连接动力电池部件的管理系统、轮毂电机的控制器、传感模块和通讯模块。与现有技术相比,本发明解决了电动飞行汽车间通信障碍以及控制方向未知的多智能体容错控制问题。
技术研发人员:顾容榕,董怡
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!