一种基于蓝牙组网的分布式电动升降单元同步控制系统的制作方法
本发明涉及一种电动升降单元同步控制系统,更具体一点说,涉及一种基于蓝牙组网的分布式电动升降单元同步控制系统,属于电动升降桌领域。
背景技术:
1、现阶段,随着蓝牙技术逐渐成熟,相关技术的应用领域也日益广泛,包括家电、消费电子、工业控制和移动设备等。为增加行业竞争力,运用该项技术的同时必须符合各种各样的市场需求,以期获得最大的市场效果。本发明的应用场景有:升降桌、大型会议桌、汽车顶棚、建筑顶棚等。
2、目前电动升降单元同步控制系统主要通过线路连接、app连接等,其存在如下技术缺点:采用有线线路连接,原有的有线连接方式易存在接口接触不良和安装空间受限、拉线成本增加、线路损耗增大等问题;通过app连接的方式会导致过分依赖于智能终端,操作过于复杂,产品适用性降低。多个电动升降单元控制方式同步率低,长时间运行后会出现高低不平、歪斜等情况造成使用风险。
技术实现思路
1、为了解决上述现有技术问题,本发明提供具有结构简单,无需线路铺展,执行单元同步率高等技术特点的一种基于蓝牙组网的分布式电动升降单元同步控制系统。
2、为了实现上述目的,本发明是通过以下技术方案实现的:
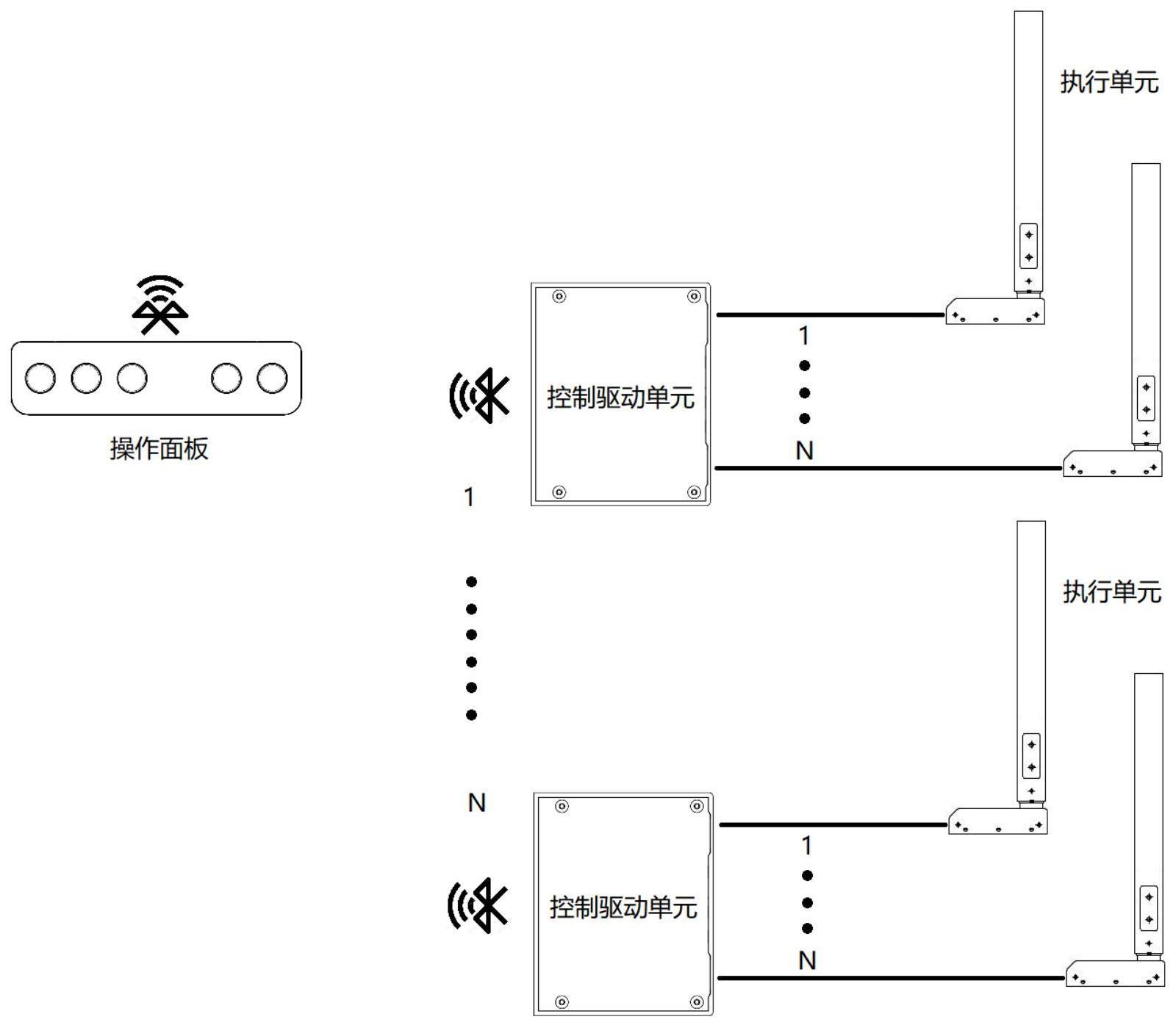
3、一种基于蓝牙组网的分布式电动升降单元同步控制系统,包括能够无线操控的操作面板以及多组控制单元,每组控制单元包括控制驱动单元以及与控制驱动单元连接的执行单元,所述操作面板与多个控制驱动单元通过蓝牙组网实现一个操作面板连接多个控制驱动单元的无线连接,每个控制驱动单元控制对应的执行单元同步动作。
4、优选的,所述操作面板包括一个蓝牙主机,所述控制驱动单元含有一个蓝牙从机,所述操作面板可通过蓝牙主机扫描并连接含有符合要求的蓝牙从机的控制驱动单元。
5、连接成功后操作面板上的控制信号通过透传方式传给蓝牙从机的控制驱动单元从而实现无线控制,操作面板统一给各控制驱动单元发送控制信号,各控制驱动单元接收到控制信号后分别独立控制执行单元工作,并将控制数据实时反馈给操作面板,操作面板根据反馈的数据对各控制驱动单元的动作进行协调,从而实现分布式同步控制。
6、优选的,所述执行单元为电动升降柱,所述电动升降柱包括电机以及由电机驱动上下移动的伸缩杆。
7、优选的,所述执行单元为电动推杆,所述电动推杆包括电机以及由电机驱动上下移动的伸缩杆。
8、优选的,所述控制驱动单元为微控制单元。
9、有益效果:结构简单,无需线路铺展,利于结构设计,不会出现接口接触不良和安装空间受限、拉线成本增加、线路损耗增大等问题。
技术特征:
1.一种基于蓝牙组网的分布式电动升降单元同步控制系统,其特征在于:包括能够无线操控的操作面板以及多组控制单元,每组控制单元包括控制驱动单元以及与控制驱动单元连接的执行单元,所述操作面板与多个控制驱动单元通过蓝牙组网实现一个操作面板与多个控制驱动单元的无线连接,每个控制驱动单元控制对应的执行单元同步动作。
2.根据权利要求1一种基于蓝牙组网的分布式电动升降单元同步控制系统,其特征在于:所述操作面板包括一个蓝牙主机,所述控制驱动单元含有一个蓝牙从机,所述操作面板可通过蓝牙主机扫描并连接含有符合要求的蓝牙从机的控制驱动单元,连接成功后操作面板上的控制信号通过透传方式传给蓝牙从机的控制驱动单元从而实现无线控制,操作面板统一给各控制驱动单元发送控制信号,各控制驱动单元接收到控制信号后分别独立控制执行单元工作,并将控制数据实时反馈给操作面板,操作面板根据反馈的数据对各控制驱动单元的动作进行协调,从而实现分布式同步控制。
3.根据权利要求1或2一种基于蓝牙组网的分布式电动升降单元同步控制系统,其特征在于:所述执行单元为电动升降柱,所述电动升降柱包括电机以及由电机驱动上下移动的伸缩杆。
4.根据权利要求1或2一种基于蓝牙组网的分布式电动升降单元同步控制系统,其特征在于:所述执行单元为电动推杆,所述电动推杆包括电机以及由电机驱动上下移动的伸缩杆。
5.根据权利要求1一种基于蓝牙组网的分布式电动升降单元同步控制系统,其特征在于:所述控制驱动单元为微控制单元。
技术总结
本发明公开的是一种基于蓝牙组网的分布式电动升降单元同步控制系统,包括能够无线操控的操作面板以及多组控制单元,每组控制单元包括控制驱动单元以及与控制驱动单元连接的执行单元,所述操作面板与多个控制驱动单元通过蓝牙组网实现一个操作面板连接多个控制驱动单元的无线连接,每个控制驱动单元控制对应的执行单元同步动作,结构简单,无需线路铺展,利于结构设计,不会出现接口接触不良和安装空间受限、拉线成本增加、线路损耗增大等问题。
技术研发人员:程教文,方中元,李诗广,诸德云
受保护的技术使用者:桐城市为诺机器人技术有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!