一种AGV的轨迹跟踪方法及AGV与流程
本发明涉及移动机器人运动控制领域,尤其涉及一种agv的轨迹跟踪方法及agv。
背景技术:
1、agv(automated guided vehicle,自动引导车)为装备有自动导航装置,能够沿规定的导航路径行驶的运输车,在仓储业,制造业以及码头装货等领域起着举足轻重的作用。
2、agv完成作业的前提是能够自主跟踪预设轨迹,并取得良好的跟踪精度。agv在行驶过程中,包括有两个自由度的位置(x,y)和一个自由度的姿态(yaw),共三个自由度,agv输入的独立控制变量为agv行驶速度(v)和agv的行驶角度(θ),共两个独立控制变量,因此agv的运动控制为欠驱动系统。当前,多数agv是采用当前位置坐标与预设轨迹上当前时刻的参考点之间的误差为输入量,以pid控制器计算后的纠偏值为输出量,以确保agv具有较好的跟踪精度,或通过纯跟踪控制方法,通过预设预瞄距离,控制agv沿固定的行驶半径,以弧线跟踪至预设轨迹的跟踪点。
3、然而,上述跟踪控制方法均采用无模型控制方法,无模型控制方法因为没有模型预测的期望行为,难以应用于欠驱动系统。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种agv的轨迹跟踪方法及agv,基于误差建立agv的跟踪控制模型构造lqr轨迹跟踪控制器,根据混沌系统获取lqr控制器的矩阵参数,保证agv在轨迹跟踪中具有较高的跟踪精度,保证agv的工作可靠性,提高agv运行效率。
2、为实现上述目的,本发明提供了如下的技术方案:
3、第一方面,在本发明提供的一个实施方案中,提供了一种agv的轨迹跟踪方法,包括以下步骤:
4、建立agv的运动学模型;
5、基于建立的所述agv的运动学模型构造agv状态量误差模型;
6、基于所述agv状态量误差模型,构造clqr控制器;
7、计算agv的轨迹跟踪精度,并反馈至所述agv状态量误差模型;
8、其中,所述clqr控制器为基于混沌系统寻优的lqr控制器。
9、作为本发明的进一步方案,所述lqr控制器的设置为根据lqr的基本原理,用泛函数表示跟踪控制律的性能指标j;其中,所述性能指标j的设置如下式:
10、
11、式中,q为q矩阵,r为r矩阵,所述q矩阵和所述r矩阵均为加权矩阵,所述q矩阵为半正定的状态加权矩阵,所述r矩阵为正定的控制加权矩阵,所述u为最优化控制规律。
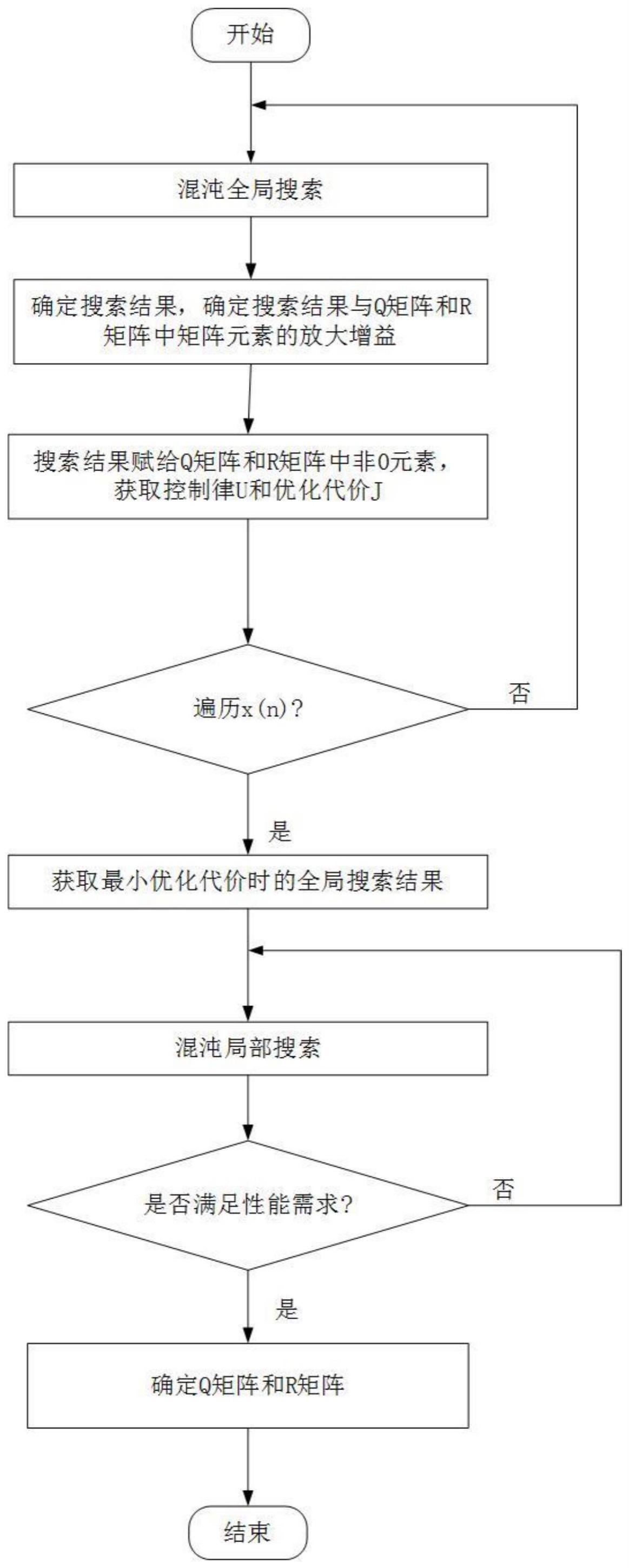
12、作为本发明的进一步方案,所述clqr控制器的构造过程包括以下步骤:
13、s301、选取所述混沌系统初值,迭代产生伪随机的混沌序列,所述混沌序列产生变量的个数为x*n,所述x为所述混沌系统的维数;
14、s302、在所述混沌序列内进行混沌全局搜索,确定搜索结果,设置放大增益,所述搜索结果与所述放大增益相乘,确定所述lqr控制器中的所述q矩阵和所述r矩阵中的非o元素;
15、s303、对s302执行n次,对比每次获得的所述性能指标j,获取最小优化代价和最优全局搜索结果,所述最小优化代价为所述最优全局搜索结果获得的所述性能指标j;
16、s304、对所述最优全局搜索结果进行混沌局部搜索,并获取最优搜索结果。
17、s305、所述最优搜索结果带入所述q矩阵和所述r矩阵的所述非o元素。
18、作为本发明的进一步方案,步骤s304中,所述混沌局部搜索的过程为:
19、将所述最优全局搜索结果代入公式为:
20、
21、式中,z(t+1)=(1-λ)z(t),0<λ<1。
22、作为本发明的进一步方案,所述混沌系统为四阶混沌系统,所述混沌系统的维数为4。
23、作为本发明的进一步方案,所述四阶混沌系统为超混沌lorenz系统,所述超混沌lorenz系统的系统方程为:
24、
25、当a=10,b=8/3,c=28且-1.52<=r<=-0.06时,系统处于超混沌状态。
26、第二方面,本发明还提供了一种agv,所述agv应用上述的agv轨迹跟踪方法。
27、作为本发明的进一步方案,所述agv为双舵轮agv,所述agv的底盘驱动类型为双舵轮agv,所述双舵轮agv包括有前舵轮和后舵轮,所述前舵轮和后舵轮均配备有行走电机和转向电机;所述双舵轮agv的运动学模型为:
28、
29、式中,q=[v,ω]t,其中,x,y的值分别为双舵轮agv车体中心在全局坐标系下的xg轴和yg轴的坐标值,v双舵轮agv的中心点oa的行驶速度,ω为双舵轮agv的横摆角速度。
30、作为本发明的进一步方案,所述agv轨迹跟踪方法中,以参考点oa的双舵轮agv运动学模型为:
31、
32、选取状态量x=[x,y,θ]t,正常行驶过程中,车体控制量u=[vf,δf,vr,δr]t,参考轨迹上的任意一个参考点,用c表示,构成运动学模型的线性状态空间。
33、第三方面,在本发明提供的又一个实施方案中,提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器加载并执行所述计算机程序时实现agv的轨迹跟踪方法的步骤。
34、第四方面,在本发明提供的再一个实施方案中,提供了一种存储介质,存储有计算机程序,所述计算机程序被处理器加载并执行时实现所述agv的轨迹跟踪方法的步骤。
35、本发明提供的技术方案,具有如下有益效果:
36、本发明提供的agv的轨迹跟踪方法及agv,基于误差建立agv的跟踪控制模型构造lqr轨迹跟踪控制器,根据混沌系统获取lqr控制器的矩阵参数,保证agv在轨迹跟踪中具有较高的跟踪精度,保证agv的工作可靠性,提高agv运行效率。
37、本发明的这些方面或其他方面在以下实施例的描述中会更加简明易懂。应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
技术特征:
1.一种agv的轨迹跟踪方法,其特征在于,所述agv的轨迹跟踪方法包括以下步骤:
2.如权利要求1所述的agv的轨迹跟踪方法,其特征在于,所述lqr控制器的设置为根据lqr的基本原理,用泛函数表示跟踪控制律的性能指标j;其中,所述性能指标j的设置如下式:
3.如权利要求2所述的agv的轨迹跟踪方法,其特征在于,所述clqr控制器的构造过程包括以下步骤:
4.如权利要求3所述的agv的轨迹跟踪方法,其特征在于,步骤s304中,所述混沌局部搜索的过程为:
5.如权利要求3所述的agv的轨迹跟踪方法,其特征在于,所述混沌系统为四阶混沌系统,所述混沌系统的维数为4。
6.如权利要求5所述的agv的轨迹跟踪方法,其特征在于,所述四阶混沌系统为超混沌lorenz系统,所述超混沌lorenz系统的系统方程为:
7.一种agv,其特征在于,所述agv应用权利要求1-6任一所述的agv的轨迹跟踪方法。
8.如权利要求7所述的agv,其特征在于,所述agv为双舵轮agv,所述agv的底盘驱动类型为双舵轮agv,所述双舵轮agv包括有前舵轮和后舵轮,所述前舵轮和后舵轮均配备有行走电机和转向电机。
9.如权利要求8所述的agv,其特征在于所述双舵轮agv的运动学模型为:
10.如权利要求7或9所述的agv,其特征在于,所述agv轨迹跟踪方法中,以参考点oa的双舵轮agv运动学模型为:
技术总结
本发明涉及移动机器人运动控制领域,具体涉及一种AGV的轨迹跟踪方法及AGV。该方法建立AGV的运动学模型;基于建立的所述AGV的运动学模型构造AGV状态量误差模型;基于所述AGV状态量误差模型,构造CLQR控制器;计算AGV的轨迹跟踪精度,并反馈至所述AGV状态量误差模型;其中,所述CLQR控制器为基于混沌系统寻优的LQR控制器。本发明提供的AGV的轨迹跟踪方法及AGV,基于误差建立AGV的跟踪控制模型构造LQR轨迹跟踪控制器,根据混沌系统获取LQR控制器的矩阵参数,保证AGV在轨迹跟踪中具有较高的跟踪精度,保证AGV的工作可靠性,提高AGV运行效率。
技术研发人员:李欣,张树房,徐丰娟,孙金菊,周德强,高星,王俊石
受保护的技术使用者:华晟智能自动化装备有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!