一种水下机器人辅助作业系统及方法与流程
本申请涉及水下作业,具体而言,涉及一种水下机器人辅助作业系统及方法。
背景技术:
1、水工程是在江河、湖泊上开发、利用、控制、调配和保护水资源的各类工程,如建立大坝、桥墩等,在水工程的基础上,需要通过水作业实现对水工程的监测。
2、现有技术中,可通过无人船或者遥控无人潜水器(remote operated vehicle,rov)等实现水作业,在控制无人船或者遥控无人潜水器时,可采用全自主作业或者人工操控的方式。其中,全自主作业受限于水下自主定位、导航及控制精度的限制,难以严格按照既定运动轨迹完成水作业;人工现场操控对作业环境有较高的要求,且相关作业人员存在安全风险,人工远程操控时,无人船或者遥控无人潜水器返回的视频画面为第一视角,使得作业人员缺乏良好的操作视角,水作业难度较大,水作业的准确性较低。
技术实现思路
1、本发明的目的在于,针对上述现有技术的不足,提供一种水下机器人辅助作业系统及方法,以解决现有技术中作业人员缺乏良好的操作视角、水作业准确性较低的技术问题。
2、为实现上述目的,本申请实施例采用的技术方案如下:
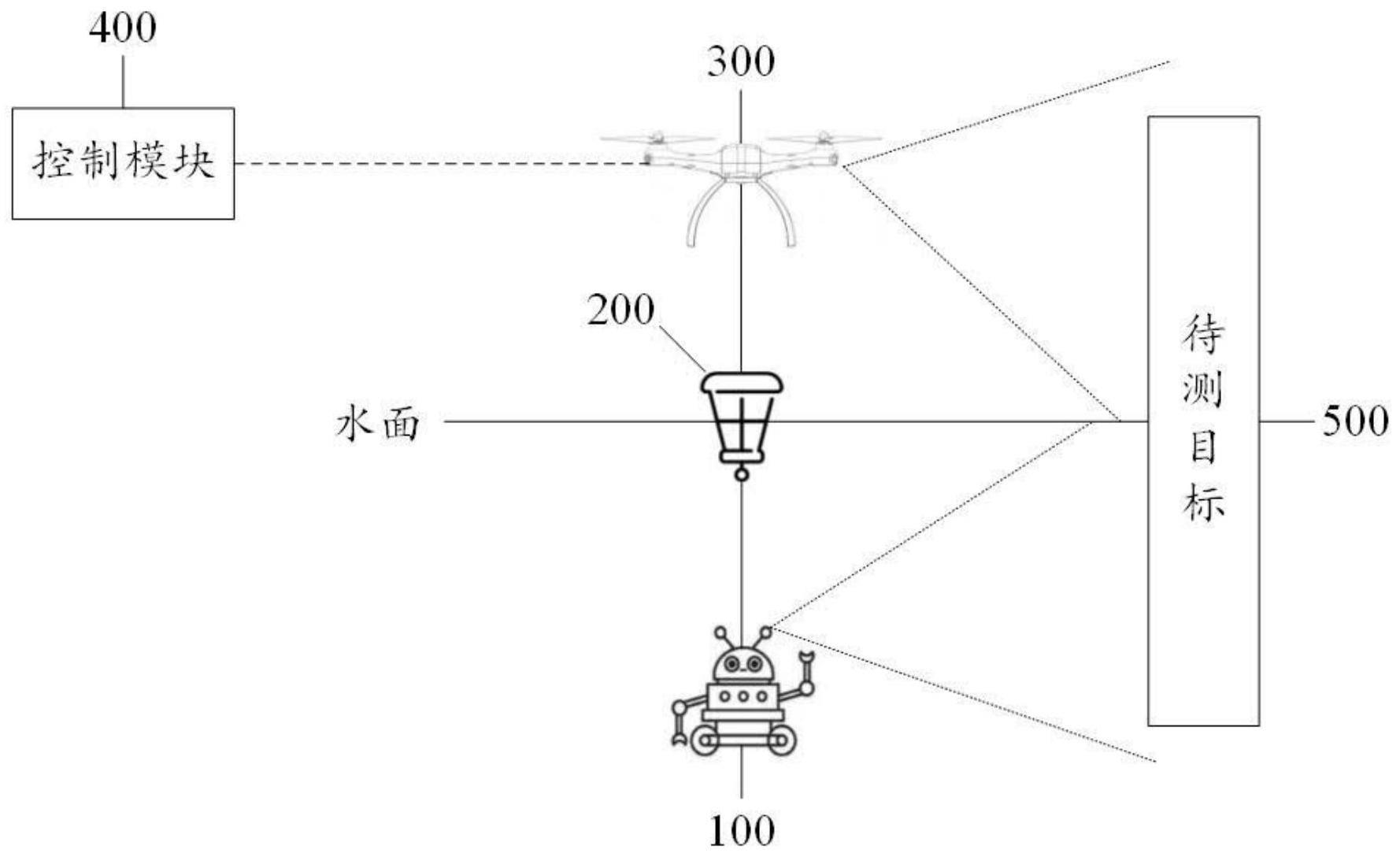
3、第一方面,本申请实施例提供一种水下机器人辅助作业系统,该系统包括:水下机器人、水面浮标、无人机、控制模块;所述水下机器人、所述无人机均与所述水面浮标有线连接,所述控制模块与所述无人机通信连接;
4、所述无人机,用于根据所述控制模块发送的第一控制指令执行待测目标的水上测量、以及向所述水面浮标发送第二控制指令,并向所述控制模块发送水上测量数据和第一位置数据,所述第一位置数据包括:所述无人机与所述水面浮标的相对位置;
5、所述水面浮标,用于根据所述第二控制指令向所述水下机器人发送第三控制指令;
6、所述水下机器人,用于根据所述第三控制指令执行待测目标的水下测量、并通过所述水面浮标、所述无人机向所述控制模块发送水下测量数据以及所述水下机器人的第二位置数据,所述第二位置数据包括:所述水下机器人与所述水面浮标的相对位置;
7、所述控制模块,用于根据所述水上测量数据、所述水下测量数据以及所述第一位置数据、所述第二位置数据,生成作业空间模型。
8、可选地,所述第一控制指令包括:水下机器人控制参数、水面浮标控制参数以及无人机控制参数;所述第二控制指令包括:所述水下机器人控制参数以及所述水面浮标控制参数;所述第三控制指令包括:所述水下机器人控制参数。
9、可选地,所述无人机包括:激光雷达;
10、所述激光雷达,用于根据所述控制模块发送的第一控制指令执行待测目标的水上测量,获取所述水上测量数据,所述水上测量数据包括:所述待测目标的水上部分的激光点云数据。
11、可选地,所述水面浮标的外表面上设置有无人机定位标识;
12、所述无人机,用于通过摄像头拍摄所述无人机定位标识,获取所述第一位置数据。
13、可选地,所述无人机,还用于向所述控制模块传输通过摄像头拍摄的视频数据。
14、可选地,所述第三控制指令还包括:声音信号;
15、所述水面浮标包括:定位发射机、水下接收机;
16、所述定位发射机,用于向所述水下机器人发送声音信号;
17、所述水下接收机,用于接收所述水下机器人根据所述声音信号发送的定位响应信号,根据所述定位响应信号获取所述第二位置数据。
18、可选地,所述水下机器人,用于根据所述第三控制指令对所述待测目标进行水下声呐测量,获取所述水下测量数据,所述水下测量数据包括:所述待测目标的水下部分的声呐测量数据。
19、可选地,所述水面浮标还包括:电池系统;
20、所述电池系统,用于向所述无人机、所述水下机器人供电。
21、可选地,所述控制模块,还用于展示所述作业空间模型,其中,所述作业空间模型包括:按空间位置关系显示的所述待测目标的三维模型、无人机模型、水下机器人模型以及水面浮标模型。
22、第二方面,本申请实施例提供一种水下机器人辅助作业方法,该方法应用于上述第一方面的水下机器人辅助作业系统中的控制模块,该方法包括:
23、接收通过控制模块输入的控制操作;
24、根据所述控制操作,向无人机发送第一控制指令;
25、接收所述无人机发送的待测目标的水上测量数据、水下测量数据以及第一位置数据、第二位置数据;
26、根据所述水上测量数据、所述水下测量数据以及所述第一位置数据、所述第二位置数据,生成作业空间模型。
27、相对现有技术而言,本申请具有以下有益效果:
28、本申请提供的一种水下机器人辅助作业系统及方法,该系统包括:水下机器人、水面浮标、无人机、控制模块,水下机器人、无人机均与水面浮标有线连接,控制模块与无人机通信连接;无人机用于根据控制模块发送的第一控制指令执行待测目标的水上测量、以及向水面浮标发送第二控制指令,并向控制模块发送水上测量数据和第一位置数据;水面浮标用于根据第二控制指令向水下机器人发送第三控制指令;水下机器人用于根据第三控制指令执行待测目标的水下测量、并通过水面浮标、无人机向控制模块发送水下测量数据以及水下机器人的第二位置数据;控制模块用于根据水上测量数据、水下测量数据以及第一位置数据、第二位置数据,生成作业空间模型,作业人员既可以查看水上测量数据以及水下测量数据,即无人机的第一视角以及水下机器人的第一视角,还可以根据作业空间模型得到水下机器人、水面浮标、无人机以及待测目标的空间位置关系,即第三视角,通过提供不同视角给作业人员,扩宽了作业人员的操作视角,可以降低水作业的难度,进而提高水作业的准确性。
技术特征:
1.一种水下机器人辅助作业系统,其特征在于,所述水下机器人辅助作业系统包括:水下机器人、水面浮标、无人机、控制模块;所述水下机器人、所述无人机均与所述水面浮标有线连接,所述控制模块与所述无人机通信连接;
2.根据权利要求1所述的水下机器人辅助作业系统,其特征在于,所述第一控制指令包括:水下机器人控制参数、水面浮标控制参数以及无人机控制参数;所述第二控制指令包括:所述水下机器人控制参数以及所述水面浮标控制参数;所述第三控制指令包括:所述水下机器人控制参数。
3.根据权利要求1所述的水下机器人辅助作业系统,其特征在于,所述无人机包括:激光雷达;
4.根据权利要求1所述的水下机器人辅助作业系统,其特征在于,所述水面浮标的外表面上设置有无人机定位标识;
5.根据权利要求1所述的水下机器人辅助作业系统,其特征在于,所述无人机,还用于向所述控制模块传输通过摄像头拍摄的视频数据。
6.根据权利要求1所述的水下机器人辅助作业系统,其特征在于,所述第三控制指令还包括:声音信号;
7.根据权利要求1所述的水下机器人辅助作业系统,其特征在于,所述水下机器人,用于根据所述第三控制指令对所述待测目标进行水下声呐测量,获取所述水下测量数据,所述水下测量数据包括:所述待测目标的水下部分的声呐测量数据。
8.根据权利要求1-7任一项所述的水下机器人辅助作业系统,其特征在于,所述水面浮标还包括:电池系统;
9.根据权利要求1-7任一项所述的水下机器人辅助作业系统,其特征在于,所述控制模块,还用于展示所述作业空间模型,其中,所述作业空间模型包括:按空间位置关系显示的所述待测目标的三维模型、无人机模型、水下机器人模型以及水面浮标模型。
10.一种水下机器人辅助作业方法,其特征在于,应用于上述权利要求1~9中任一所述水下机器人辅助作业系统中的控制模块,所述方法包括:
技术总结
本申请提供一种水下机器人辅助作业系统及方法,涉及水下作业技术领域。该系统中水下机器人、无人机均与水面浮标有线连接,控制模块与无人机通信连接,无人机根据控制模块发送的第一控制指令测量并向控制模块发送水上测量数据和第一位置数据、向水面浮标发送第二控制指令,水面浮标根据第二控制指令向水下机器人发送第三控制指令,水下机器人根据第三控制指令执行待测目标的水下测量,并通过水面浮标、无人机向控制模块发送水下测量数据及第二位置数据,控制模块根据水上测量数据、水下测量数据及第一位置数据、第二位置数据,生成作业空间模型,通过提供不同视角给作业人员,扩宽了作业人员的操作视角,可以降低水作业的难度,提高水作业准确性。
技术研发人员:邢守壮,陈基展,黄元凯
受保护的技术使用者:杭州聆巡科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!