集中控制的多无人车调度方法、系统、设备及存储介质与流程
本发明涉及移动机器人智能控制领域,尤其涉及一种集中控制的多无人车调度方法、系统、设备及存储介质。
背景技术:
1、随着移动机器人智能控制技术的发展,多无人车协同被广泛应用于智能仓储物流等调度业务,实现多无人车的调度需要确保各无人车在运行空间上无冲突。但是现有技术主要是基于路径点和路径线为原子资源的全局资源分配调度方法,但这些方法的复杂度过高或者对无人车的同步下的状态控制要求很高,而且多无人车系统的不确定性使得多无人车死锁现象,以及基于碰撞的空间资源冲突几乎无法避免且很难准确的探测。因此,如何使局部多无人车空间资源冲突得到解决成为了一个急需解决的问题。
2、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明提供了一种集中控制的多无人车调度方法、系统、设备及存储介质,旨在解决现有技术中难以使局部多无人车空间资源冲突得到解决的技术问题。
2、为实现上述目的,本发明提供了一种集中控制的多无人车调度方法,所述方法包括以下步骤:
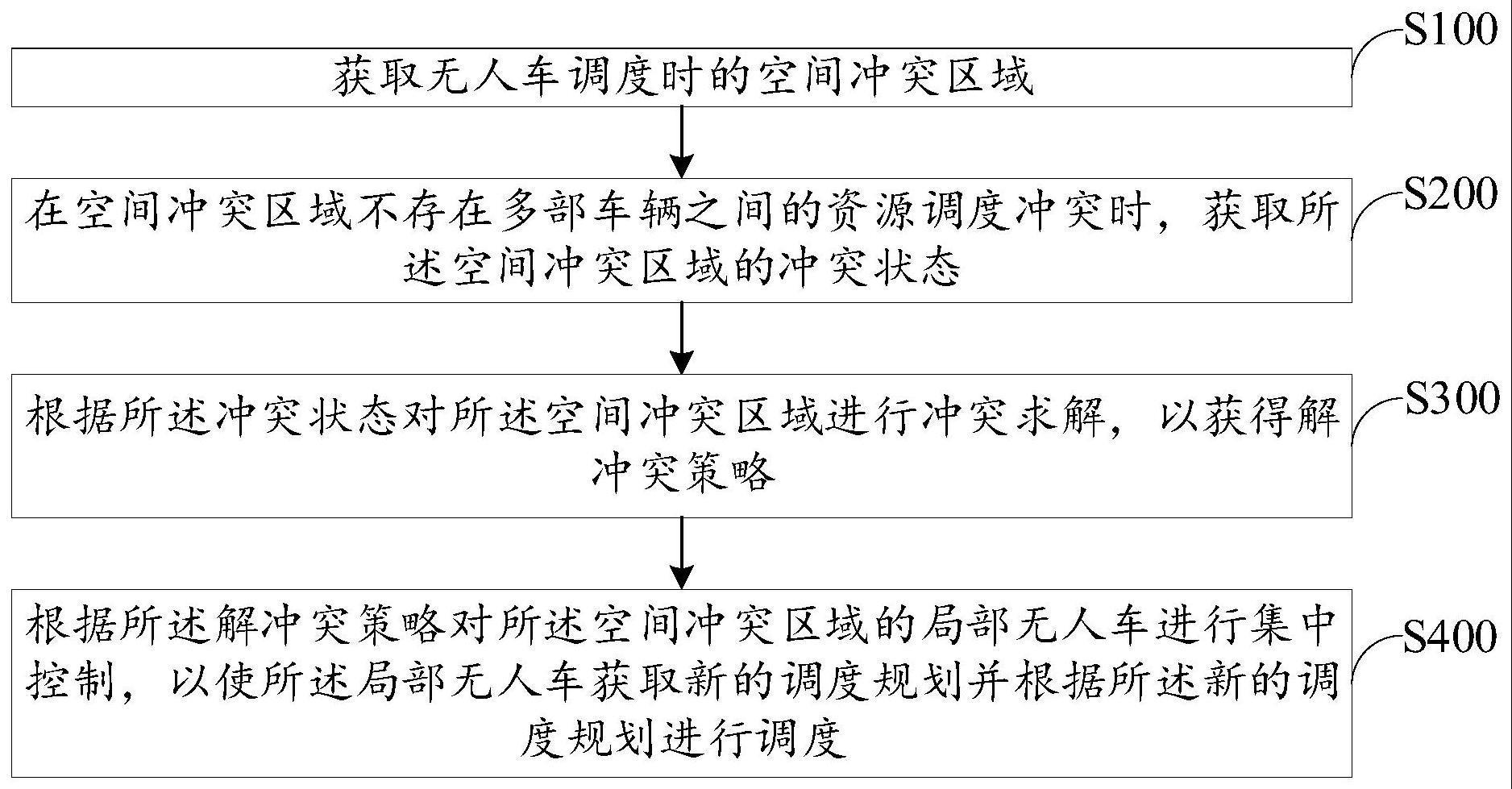
3、获取无人车调度时产生的空间冲突区域;
4、在空间冲突区域不存在多部车辆之间的资源调度冲突时,获取所述空间冲突区域的冲突状态;
5、根据所述冲突状态对所述空间冲突区域进行冲突求解,以获得解冲突策略;
6、根据所述解冲突策略对所述空间冲突区域的局部无人车进行集中控制,以使所述局部无人车获取新的调度规划并根据所述新的调度规划进行调度。
7、可选地,所述根据所述解冲突策略对所述空间冲突区域的局部无人车进行集中控制,以使所述局部无人车获取新的调度规划并根据所述新的调度规划进行调度的步骤,包括:
8、根据所述解冲突策略,通过集中控制函数实时计算所述空间冲突区域的解除冲突时的所述局部无人车的行驶速度值;
9、根据所述行驶速度值对所述局部无人车的行驶速度进行更新,以使所述局部无人车根据新的行驶速度进行调度。
10、可选地,所述在所述间冲突区域不存在多部车辆之间的资源调度冲突时,获取所述空间冲突区域的冲突状态的步骤之前,还包括:
11、对所述空间冲突区域进行检测,并判断是否存在新的无人车进入所述空间冲突区域;
12、若存在所述新的无人车进入所述空间冲突区域,则判断所述空间冲突区域是否存在多部车辆之间的资源调度冲突;
13、若所述空间冲突区域存在多部车辆之间的资源调度冲突,则判定所述空间冲突区域产生死锁环,并通过解死锁环模块解开所述死锁环。
14、可选地,所述对所述空间冲突区域进行检测,并判断是否存在新的无人车进入所述空间冲突区域的步骤之前,还包括:
15、获取当前时刻所在周期离散时间上全部的无人车调度状态,根据所述无人车调度状态判断是否存在待分配资源的无人车;
16、若是,则判断是否存在所述待分配资源的无人车因调度冲突产生预测死锁环;
17、若不存在所述待分配资源的无人车因调度冲突产生预测死锁环,则获取所述待分配资源的无人车调度过程中存在的空间冲突区域。
18、可选地,所述获取当前时刻所在离散时间周期上全部的无人车调度状态,根据所述无人车调度状态判断是否存在待分配资源的无人车的步骤之前,还包括:
19、根据无人车的预设调度模型对连续调度时间进行离散化,以获取时间相等的周期离散时间;
20、根据所述周期离散时间对所述无人车进行行驶速度与目标调度位置的规划,并生成全部的所述无人车调度状态。
21、可选地,所述若不存在所述待分配资源的无人车因调度冲突产生预测死锁环,则获取所述待分配资源的无人车调度过程中存在的空间冲突区域的步骤之后,还包括:
22、若存在所述待分配资源的无人车因调度冲突产生预测死锁环,则获取所述待分配资源的无人车将要构成的全部预测死锁环;
23、根据所述全部预测死锁环求解对应的预测解锁策略;
24、根据所述预测解锁策略对全部的无人车进行新路径规划,以使所述无人车根据所述新路径规划进行调度。
25、可选地,所述若所述空间冲突区域存在多部车辆之间的资源调度冲突,则判定所述空间冲突区域产生死锁环,并通过解死锁环模块解开所述死锁环的步骤,包括:
26、在判定所述空间冲突区域存在死锁环时,判断所述解死锁模块是否能生成解开所述死锁环的策略解;
27、若是,则根据所述策略解解开所述死锁环。
28、此外,为实现上述目的,本发明还提出一种集中控制的多无人车调度系统,所述系统包括:
29、冲突获取模块,用于获取无人车调度时产生的空间冲突区域;
30、状态获取模块,用于在所述空间冲突区域不存在多部车辆之间的资源调度冲突时,获取所述空间冲突区域的冲突状态;
31、策略获取模块,根据所述冲突状态对所述空间冲突区域进行冲突求解,以获得解冲突策略;
32、集中控制模块,根据所述解冲突策略对所述空间冲突区域的局部无人车进行集中控制,以使所述局部无人车获取新的调度规划并根据所述新的调度规划进行调度。
33、此外,为实现上述目的,本发明还提出一种集中控制的多无人车调度设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的集中控制的多无人车调度程序,所述集中控制的多无人车调度程序配置为实现如上文所述的集中控制的多无人车调度方法的步骤。
34、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有集中控制的多无人车调度程序,所述集中控制的多无人车调度程序被处理器执行时实现如上文所述的集中控制的多无人车调度方法的步骤。
35、本发明通过获取空间冲突区域;在所述间冲突区域不存在多部车辆之间的资源调度冲突时,获取所述空间冲突区域的冲突状态;根据所述冲突状态对所述空间冲突区域进行冲突求解,以获得解冲突策略;根据所述解冲突策略对所述空间冲突区域的局部无人车进行集中控制,以使所述局部无人车获取新的调度规划并根据所述新的调度规划进行调度。本发明通过对无人车在调度过程中的局部空间区域产生的冲突进行求解,获得解冲突策略,使得空间冲突区域的局部无人车根据解冲突策略获得新调度规划并根据新调度规划进行调度,相较于现有技术,可以有效的检测并解决空间资源冲突,提高无人车的协同调度效率。
技术特征:
1.一种集中控制的多无人车调度方法,其特征在于,所述方法包括以下步骤:
2.如权利要求1所述的方法,其特征在于,所述根据所述解冲突策略对所述空间冲突区域的局部无人车进行集中控制,以使所述局部无人车获取新的调度规划并根据所述新的调度规划进行调度的步骤,包括:
3.如权利要求1所述的方法,其特征在于,所述在所述间冲突区域不存在多部车辆之间的资源调度冲突时,获取所述空间冲突区域的冲突状态的步骤之前,还包括:
4.如权利要求3所述的方法,其特征在于,所述对所述空间冲突区域进行检测,并判断是否存在新的无人车进入所述空间冲突区域的步骤之前,还包括:
5.如权利要求4所述的方法,其特征在于,所述获取当前时刻所在离散时间周期上全部的无人车调度状态,根据所述无人车调度状态判断是否存在待分配资源的无人车的步骤之前,还包括:
6.如权利要求4所述的方法,其特征在于,所述若不存在所述待分配资源的无人车因调度冲突产生预测死锁环,则获取所述待分配资源的无人车调度过程中存在的空间冲突区域的步骤之后,还包括:
7.如权利要求3所述的方法,其特征在于,所述若所述空间冲突区域存在多部车辆之间的资源调度冲突,则判定所述空间冲突区域产生死锁环,并通过解死锁环模块解开所述死锁环的步骤,包括:
8.一种集中控制的多无人车调度系统,其特征在于,所述系统包括:
9.一种集中控制的多无人车调度设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的集中控制的多无人车调度程序,所述集中控制的多无人车调度程序配置为实现如权利要求1至7任一项所述的集中控制的多无人车调度方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有集中控制的多无人车调度程序,所述集中控制的多无人车调度程序被处理器执行时实现如权利要求1至7任一项所述的集中控制的多无人车调度方法的步骤。
技术总结
本发明涉及移动机器人智能控制领域,公开了一种集中控制的多无人车调度方法、系统、设备及存储介质,该方法包括获取无人车调度中的空间冲突区域;在空间冲突区域不存在多部车辆之间的资源调度冲突时,获取空间冲突区域的冲突状态;根据冲突状态对空间冲突区域进行冲突求解,以获得解冲突策略;根据解冲突策略对空间冲突区域的局部无人车进行集中控制,以使局部无人车获取新的调度规划并根据新的调度规划进行调度。本发明通过求解获得解冲突策略,并使空间冲突区域的局部无人车根据解冲突策略获得新调度规划并根据新调度规划进行调度,相较于现有技术,可以有效的检测并解决空间资源冲突,提高无人车的协同调度效率。
技术研发人员:陈文成,吕朝顺,元志刚,张倩玉
受保护的技术使用者:劢微机器人科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!