一种AGV自动解锁方法、存储介质和电子设备与流程
本发明涉及agv,尤其是一种agv自动解锁方法、存储介质和电子设备。
背景技术:
1、agv车辆根据采用的驱动方法及驱动系统,可组装成不同运行方式的可自动导引的小车,市场上也有众多的产品。对于可多方位运行的agv,其灵活性较高,在仓储系统中也得到较为广泛的应用。空间利用率的提高同时也引起了交通管制复杂度的增加和交通堵塞的增多,同时也不可避免的会出现agv死锁,即agv无法沿原规划路径行驶的情况。如果不及时解锁,会造成更多agv的堵塞。
2、agv的死锁情况包含下面4种:(1)区域堵死,死锁环内有agv是被区域堵塞。比如:agv在等待进入区域,agv2在区域内,在等待agv1。(2)agv堵死,几辆agv之间的堵塞形成一个环。(3)被“静止”的agv堵死,此处“静止”表示agv只能停在当前位置,无法继续运行,包括空闲、故障、脱轨、agv被死锁且解锁失败、掉线。(4)被不能经过的区域堵死,包括被设定为不允许经过的、允许经过的agv数量为0的区域堵死、或交管区域内的agv数量>可允许数量,或占用区域的agv都属于故障状态。
技术实现思路
1、本发明第一个发明的目的在于解决现有agv场地内出现死锁,造成拥堵的问题,提供一种agv自动解锁方法。
2、为了达到上述目的,本发明的采用以下技术方案:
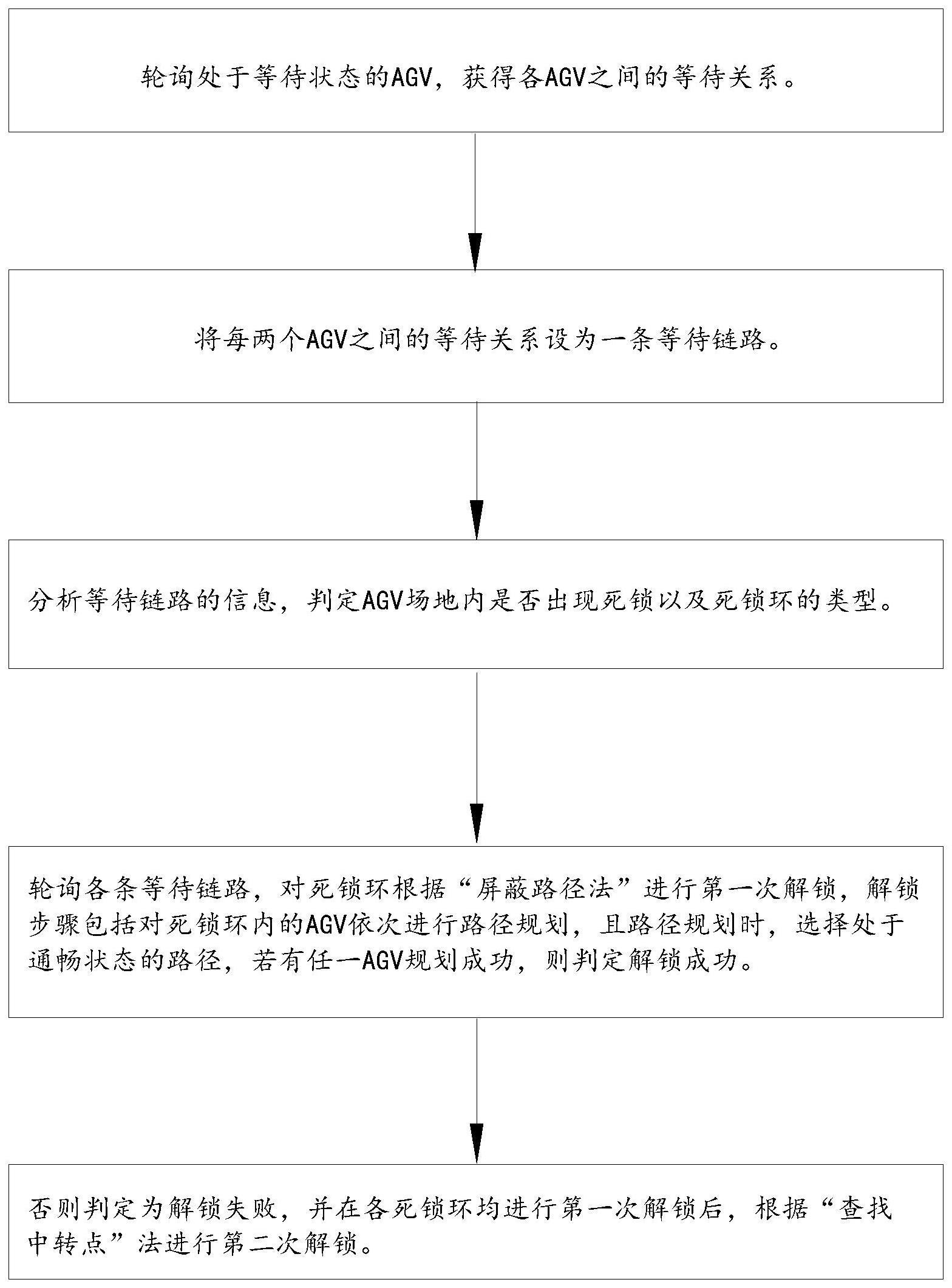
3、agv自动解锁方法,包括以下步骤:轮询处于等待状态的agv,获得各agv之间的等待关系;将每两个agv之间的等待关系设为一条等待链路;分析等待链路的信息,判定agv场地内是否出现死锁以及死锁环的类型;轮询各条等待链路,对死锁环根据“屏蔽路径法”进行第一次解锁,解锁步骤包括对死锁环内的agv依次进行路径规划,且路径规划时,选择处于通畅状态的路径,若有任一agv规划成功,则判定解锁成功;记录解锁成功时的agv信息,agv信息包括agv身份信息、中转点、解锁后的路径以及解锁时间;否则判定为解锁失败,并在各死锁环均进行第一次解锁后,根据“查找中转点”法进行第二次解锁。
4、与现有技术相比,本发明的agv自动解锁方法,对死锁环可通过不同的方式进行两次解锁,这样大大提高解锁几率,并且,第一次解锁时,屏蔽处于堵塞状态的路径,即在屏蔽处于堵塞或封闭状态的路径的情况下对agv的行驶路径进行重新规划,可避开拥堵路径对死锁环进行解锁,且死锁环内任一辆agv规划成功,则完成解锁,无需再对死锁环内的其他agv进行规划,可有效提升解锁效率。另外,死锁环解锁成功后,死锁环内所涉及的等待链路即可取消。需说明的是本发明的“屏蔽路径法”是指选择性地屏蔽带有某些属性的路径,如上述的屏蔽处于堵塞或封闭状态的路径;本发明的轮询是指逐一查询。
5、进一步的,所述第二次解锁包括以下步骤:轮询各个死锁环,设死锁环内的任一辆agv为agv1,根据链路的死锁类型选择不同的筛选方案,为agv1筛选中转点;调取agv1从当
6、前位置到该位置的完整路径,当完整路径未被占用,则该位置作为agv1的中转点;agv1行5驶至中转点等待其他agv通过,后返回至原位置,解锁成功。在本方案中,agv1退到中转
7、点后,死锁环内的其余agv可按原规划继续行驶,若无法按原规划行驶,则重新规划行驶路径。需说明的是,本发明的“查找中点法”是指寻找一个临时中转点,使agv先退到临时中转点等待,等死锁环解开后再原路返回。当agv1到该位置的完整路径未被占用,说明中转点的位置与agv1的位置之间至少存在一条连通的路径。
8、0进一步的,当死锁类型为agv堵塞,则屏蔽解锁过程中已筛选出的中转点以及等待链路中被agv已占用的位置,筛选出可作为agv1的中转点的位置;当死锁类型为区域堵塞,则屏蔽解锁过程中已筛选出的中转点、等待链路中被agv已占用的位置以及该死锁区域所占位置,筛选出可作为agv1的中转点的位置。
9、本发明的另一个目的在于提供一种存储介质,所述存储介质上存储有计算机程序,所5述计算机程序被处理器执行时实现上述方案的agv自动解锁方法,因此,具有上述方法的所有优点。
10、本发明的另一个发明目的在于提供一种电子设备,包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现上述方案的agv自动解锁方法,因此,具有上述方法的所有优点。
11、
技术特征:
1.一种agv自动解锁方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的agv自动解锁方法,其特征在于,所述第二次解锁包括以下步骤:
3.根据权利要求1所述的agv自动解锁方法,其特征在于,当死锁类型为agv堵塞,则屏蔽解锁过程中已筛选出的中转点以及等待链路中被agv已占用的位置,筛选出可作为agv1的中转点的位置;
4.存储介质,其特征在于:所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现根据权利要求1-3任一项所述的agv自动解锁方法。
5.电子设备,其特征在于:包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现根据权利要求1-3任一项的agv自动解锁方法。
技术总结
本发明公开了一种AGV自动解锁方法、存储介质和电子设备。与现有技术相比,本发明的AGV自动解锁方法,对死锁环可通过不同的方式进行两次解锁,这样大大提高解锁几率,并且,第一次解锁时,屏蔽处于堵塞状态的路径,即在屏蔽处于堵塞或封闭状态的路径的情况下对AGV的行驶路径进行重新规划,可避开拥堵路径对死锁环进行解锁,且死锁环内任一辆AGV规划成功,则完成解锁,无需再对死锁环内的其他AGV进行规划,可有效提升解锁效率。另外,本发明的存储介质和电子设备均用于实现上述方法。
技术研发人员:刘珍
受保护的技术使用者:广东嘉腾机器人自动化有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!