果园智能巡检机器人的制作方法
本发明涉及农业巡检机器人,尤其是指一种果园智能巡检机器5人。
背景技术:
1、作为果园日常管理工作的重要一环,定期对果树生长状况进行检查是实现果园高质量生产的重要举措。然而,传统的巡检工作主要是由人工完成,
2、这不仅造成人工成本高、巡检效率下降等问题,还极度依赖巡检人员的经验,0易造成误判漏判等情况发生。
3、因此,针对上述问题,迫切需要提供一种果园智能巡检机器人以代替人工完成果园的巡检工作。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中存在的技术缺5陷,而提出一种果园智能巡检机器人,其采用无线遥控、自主导航、自动跟
2、随三种控制模式,能有效满足在果园复杂环境下的行驶;并且使用数据采集模块采集温度、湿度、光照、果树生长情况等数据,实现果园智能化巡检,减少人工巡检的成本,为果园精细化管理提供决策依据。
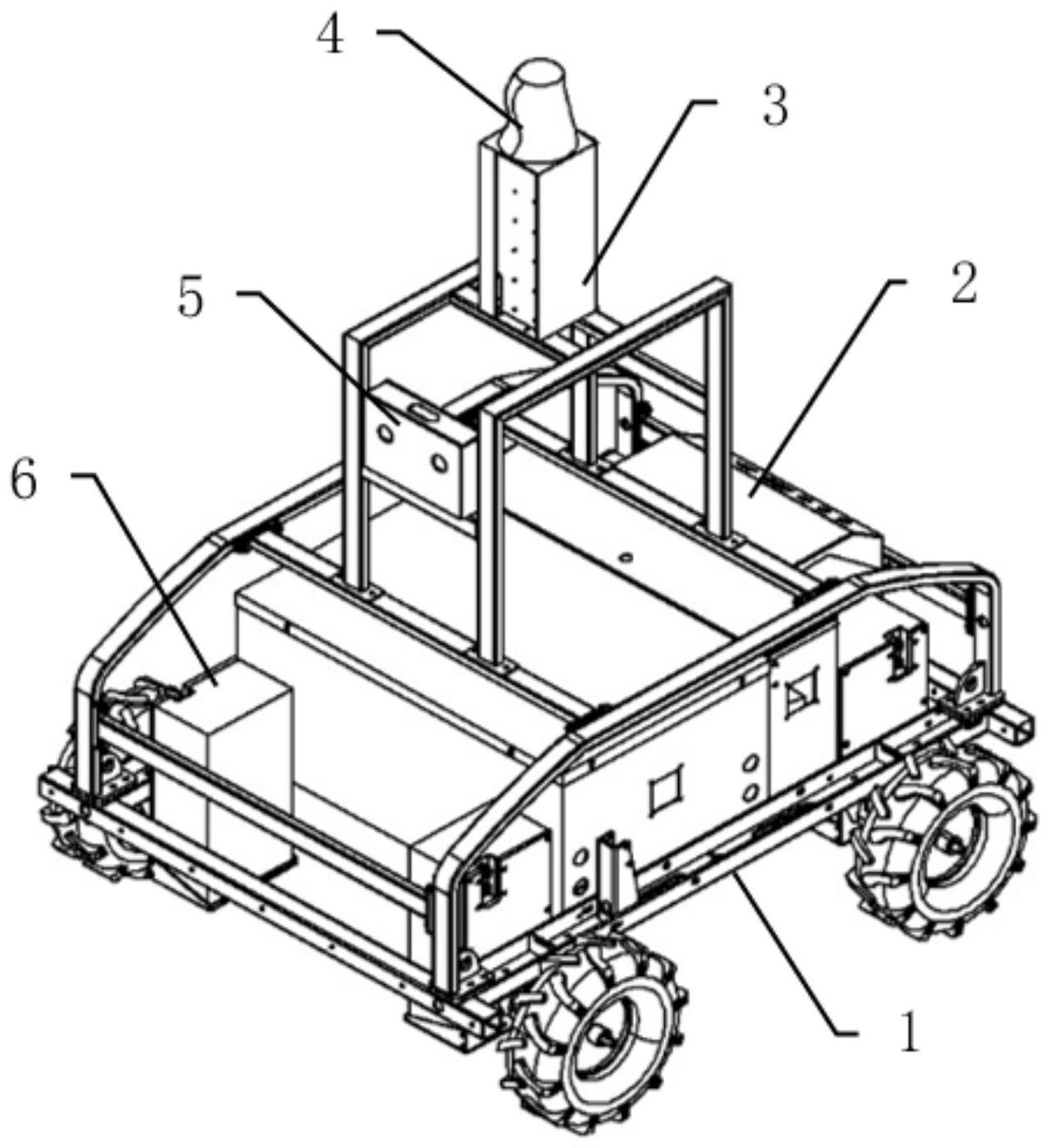
3、为解决上述技术问题,本发明提供了一种果园智能巡检机器人,包括:0行走机构,其包括车身和移动底盘,所述车身上设置有移动底盘;
4、控制模块,其包括ecu和工控机,所述ecu和工控机通讯连接;
5、数据采集模块,其设置于所述车身上,所述数据采集模块用于实时采集数据并将采集的数据发送至所述工控机;
6、卫星差分定位模块,其连接所述工控机,所述卫星差分定位模块用于接收卫星实时传输的位置信息,并将位置信息发送至所述工控机,以实现机器人的自主导航;
7、无线遥控模块,其与所述ecu和工控机通讯连接,以实现对机器人的无线遥控。
8、在本发明的一个实施例中,所述数据采集模块包括摄像头和/或双目视觉相机和/或温湿度光照三合一传感器和/或二氧化碳传感器。作为优选的,所述数据采集模块包括球形摄像头和深度双目视觉相机和温湿度光照三合一传感器和二氧化碳传感器,其中
9、所述摄像头和/或双目视觉相机设置于所述车身上
10、温湿度光照三合一传感器和/或二氧化碳传感器,其中所述温湿度光照三合一传感器用于采集果树生长环境的温度、湿度和光照强度,所述二氧化碳传感器用于采集果树生长环境的二氧化碳浓度信息。
11、在本发明的一个实施例中,所述数据采集模块包括摄像头和/或双目视觉相机,所述摄像头和/或双目视觉相机设置于所述车身上,其中所述摄像头用于拍摄机器人两侧的果树图像,所述双目视觉相机用于拍摄机器人前方的彩色图像和深度图像。
12、在本发明的一个实施例中,所述摄像头为球形摄像头,双目视觉相机为深度双目视觉相机。
13、在本发明的一个实施例中,所述工控机上部署有ros2系统,所述ros2系统用于对双目视觉相机拍摄到的彩色图像和深度图像进行果树生长情况的分析判断,以实现机器人的自主导航。
14、在本发明的一个实施例中,所述无线遥控模块包括无线遥控接收器,所述无线遥控接收器与所述ecu、工控机通讯连接。
15、在本发明的一个实施例中,所述移动底盘包括车轮和电机驱动装置,每个所述车轮均配置有电机驱动装置。
16、在本发明的一个实施例中,所述电机驱动装置与所述ecu通讯连接。
17、在本发明的一个实施例中,所述电机驱动装置包括伺服电机、伺服驱动器和减速器,所述伺服电机通过减速器连接所述伺服驱动器。
18、在本发明的一个实施例中,所述车身为笼式结构。
19、本发明的上述技术方案相比现有技术具有以下优点:
20、本发明所述的一种果园智能巡检机器人,其采用无线遥控、自主导航、自动跟随三种控制模式,能有效满足在果园复杂环境下的行驶;并且使用数据采集模块采集温度、湿度、光照、果树生长情况等数据,实现果园智能化巡检,减少人工巡检的成本,为果园精细化管理提供决策依据。
技术特征:
1.一种果园智能巡检机器人,其特征在于:包括:
2.根据权利要求1所述的一种果园智能巡检机器人,其特征在于:所述数据采集模块包括温湿度光照三合一传感器和/或二氧化碳传感器,其中所述温湿度光照三合一传感器用于采集果树生长环境的温度、湿度和光照强度,所述二氧化碳传感器用于采集果树生长环境的二氧化碳浓度信息。
3.根据权利要求1所述的一种果园智能巡检机器人,其特征在于:所述数据采集模块包括摄像头和/或双目视觉相机,所述摄像头和/或双目视觉相机设置于所述车身上,其中所述摄像头用于拍摄机器人两侧的果树图像,所述双目视觉相机用于拍摄机器人前方的彩色图像和深度图像。
4.根据权利要求3所述的一种果园智能巡检机器人,其特征在于:所述摄像头为球形摄像头,双目视觉相机为深度双目视觉相机。
5.根据权利要求3或4所述的一种果园智能巡检机器人,其特征在于:所述工控机上部署有ros2系统,所述ros2系统用于对双目视觉相机拍摄到的彩色图像和深度图像进行果树生长情况的分析判断,以实现机器人的自主导航。
6.根据权利要求1所述的一种果园智能巡检机器人,其特征在于:所述无线遥控模块包括无线遥控接收器,所述无线遥控接收器与所述ecu、工控机通讯连接。
7.根据权利要求1所述的一种果园智能巡检机器人,其特征在于:所述移动底盘包括车轮和电机驱动装置,每个所述车轮均配置有电机驱动装置。
8.根据权利要求7所述的一种果园智能巡检机器人,其特征在于:所述电机驱动装置与所述ecu通讯连接。
9.根据权利要求7或8所述的一种果园智能巡检机器人,其特征在于:所述电机驱动装置包括伺服电机、伺服驱动器和减速器,所述伺服电机通过减速器连接所述伺服驱动器。
10.根据权利要求1所述的一种果园智能巡检机器人,其特征在于:所述车身为笼式结构。
技术总结
本发明涉及一种果园智能巡检机器人,包括行走机构、控制模块、数据采集模块、卫星差分定位模块和无线遥控模块,控制模块包括ECU和工控机,ECU和工控机通讯连接;数据采集模块实时采集数据并将采集的数据发送至工控机;卫星差分定位模块接收卫星实时传输的位置信息,并将位置信息发送至工控机,以实现机器人的自主导航;无线遥控模块与ECU和工控机通讯连接,以实现对机器人的无线遥控。本发明采用无线遥控、自主导航、自动跟随三种控制模式,能有效满足在果园复杂环境下的行驶;并且使用数据采集模块采集温度、湿度、光照、果树生长情况等数据,实现果园智能化巡检,减少人工巡检的成本,为果园精细化管理提供决策依据。
技术研发人员:王蓬勃,李伟
受保护的技术使用者:苏州博田自动化技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!