基于IGWO模糊PID自动调节真空吸盘控制方法与流程
本发明涉及超精密机床自动化领域,具体为一种基于igwo模糊pid自动调节真空吸盘控制方法。
背景技术:
1、机床向来被誉为“工业母机”,是制造机器的机器,其重要性毋庸置疑。机床是整个装备制造业的核心生产基础,尤其是超高精度机床、五轴高档数控机床等顶级机床,其技术水平直接反映了一个国家制造业的整体竞争力。
2、制造业无论哪个领域都无法脱离高精度机床,大到国防武器、航空航天、航母舰船的关键零部件,小到手表齿轮、各类精密仪器等,莫不如是。近些年来,中国智能制造崛起,航空工业、自主航母、高新产业迅猛发展,制造业的每一次飞跃,都离不开机床制造精度的提升。今天的工业生产中,柔性制造、高效、精密等新标准被不断地推向新高度,都对超高精度机床提出了更高的要求。
3、由于超精密机床需要对不同大小的工件进行加工,即加工工件具有多样性,真空吸盘需要根据具体的工件提供不同的负载吸力,以满足加工需求,如何精确控制负载吸力显得格外重要。
技术实现思路
1、本发明的目的就在于为了解决上述至少一个技术问题而提供一种基于igwo模糊pid自动调节真空吸盘控制方法。
2、本发明通过以下技术方案来实现上述目的:一种基于igwo模糊pid自动调节真空吸盘控制方法,包括气缸、气泵、单向阀、电磁阀、真空发生器、真空表、真空吸盘以及工控机;
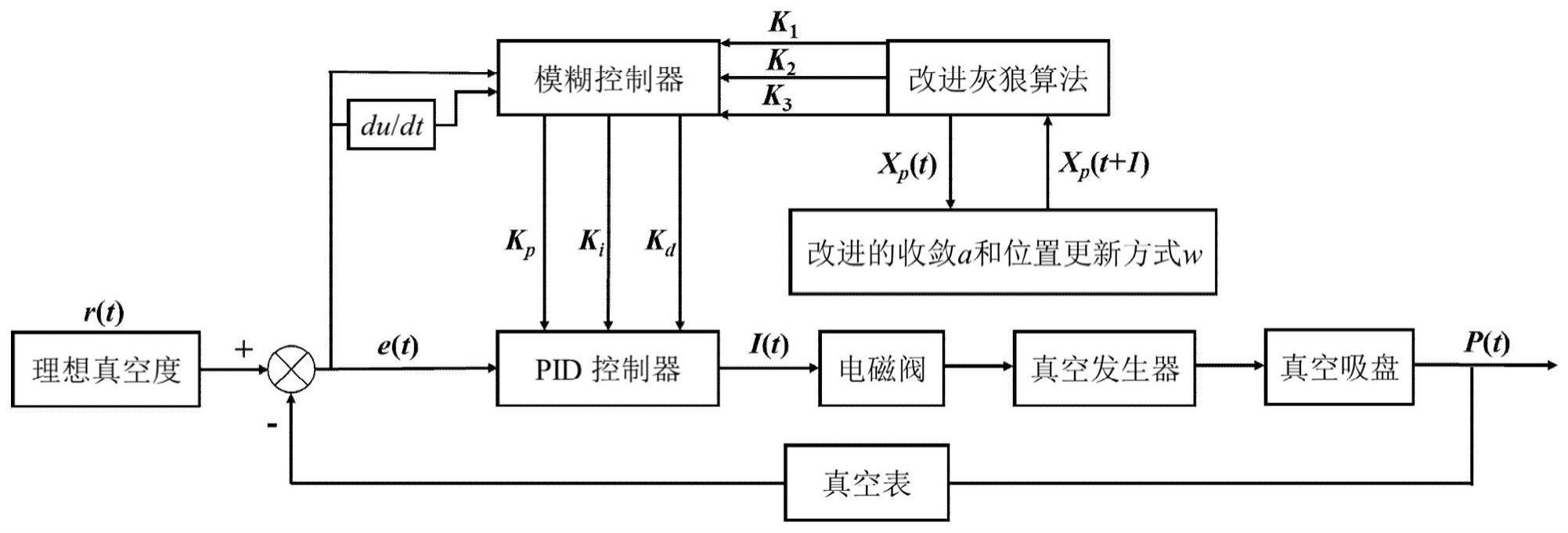
3、所述气泵将气缸的气输送到电磁阀,单向阀阻止气体逆向流动,电磁阀控制气路的通断和压力的大小,电磁阀通入的气体使得真空发生器产生真空负压,进而大气压可以使真空吸盘吸住工件,真空表实时测量真空吸盘的真空度,然后将测量值传输到工控机与理想值对比,通过基于igwo模糊pid计算器计算之后,发出控制指令到电磁阀,进而控制电磁阀的通断和压力的大小;其中,基于igwo模糊pid的计算方法如下:
4、步骤一、初始化每个狼群的位置x、最大迭代数nmax,当前的迭代数t、收敛因子a、系数矢量a和c,并将优化参数带入适应度函数计算目标适应度;
5、步骤二、迭代一次,更新当前灰狼的位置x、收敛因子a、系数矢量a和c;
6、步骤三、计算每个种群适应度的值,更新alpha(α)、beta(β)、delta(δ)三头狼的位置(最佳值),当前的迭代数t+1;
7、步骤四、当前的迭代数t与最大迭代数nmax比较,如果当前迭代数t没有达到最大迭代数nmax,则继续更新迭代,如果达到了则退出循环;
8、步骤五、实时的误差和误差变化率传输到模糊逻辑控制器之中,在模糊规则库找到与之对应的规则;
9、步骤六、将改进灰狼寻优算法igwo得到的pid最佳值带入模糊逻辑控制器之中,在模糊规则库的具体的规则之下,经过模糊化、模糊推理和解模糊化,最后输出三个pid参数;
10、步骤七、实时误差通过pid控制器之后控制信号给电磁阀,进而控制阀口压力的大小,达到预设的目标值。
11、pid控制器的控制方法为:
12、
13、其中,kp、ki和kd分别是pid控制器的三个参数,e(t)为理想真空度与实际真空度之差,u(t)为pid控制器的输出;
14、而模糊pid控制器三个参数计算公式为:
15、
16、其中kp、ki和kd是初始的pid三参数,△kp、△ki和△kd为模糊控制器的输出量。
17、灰狼寻优算法即igwo算法模拟了自然界灰狼的领导层级和狩猎机制,四种类型的灰狼,如alpha(α),beta(β),delta(δ),and omega(ω)被用来模拟领导阶层;此外,还实现了狩猎的三个主要步骤:寻找猎物、包围猎物和攻击猎物;为了在设计gwo算法时对灰狼的社会等级进行数学建模,我们将最适解作为α;
18、因此,第二和第三个最佳解决方案分别被命名为β和δ;剩下的候选解被假定为ω;在gwo算法中,狩猎过程由α、β和δ引导ω狼跟随这三只狼;
19、在狩猎过程中,将灰狼围捕猎物的行为定义如下:
20、d=|c×xp(t)-x(t)|
21、x(t+1)=xo(t)-a×d
22、其中t是当前迭代次数,a和c是系数向量;xo是猎物的位置向量,x表示狼的位置向量;系数向量表示为:
23、a=2a×r1-a
24、c=2r2
25、其中,r1和r2是1到0范围内的随机向量,并且向量a的表达为
26、
27、在狩猎阶段,α、β和δ的最佳位置被用来寻找狼的最佳方位;狼包围猎物的下一个地点是:
28、dα=|c1×xα(t)-x(t)
29、dβ=|c2×xβ(t)-x(t)
30、dδ=|c3×xδ(t)-x(t)
31、x1=xα-a1×dα
32、x2=xβ-a2×dβ
33、x3=xδ-a3×dδ
34、
35、
36、其中xα、xβ和xδ分别是alpha、beta、delta的位置向量。x1、x2和x3分别表示ω狼朝向α、β和δ狼的距离和方向;xp(t)是ω狼的当前位置向量;
37、当猎物停止移动时,灰狼通过攻击完成狩猎过程;
38、为了模拟接近的猎物,当a的值从2线性下降到0时,其对应的a也在区间[-a,a]中变化;
39、当a的值在[-a,a]范围内时,灰狼的下一个位置可以位于其当前位置和猎物位置之间的任何位置;
40、当|a|<1时,狼攻击猎物;
41、当|a|>1时,灰狼与猎物分离,希望找到更合适的猎物;每次迭代后都会更新狼的位置,并重新计算α、β和δ狼的位置以捕获猎物。
42、收敛因子a变化为:位置更新方式变为:
43、
44、其中,m1,m2,wi and wf是常数。
45、与现有技术相比,本发明的有益效果是:
46、1、使用真空表作为反馈输入,然后通过模糊pid控制真空吸盘的真空度达期望的值,其中模糊控制器参数寻优以灰狼搜索算法为基础,改进其非线性调整收敛因子和位置更新方式,较基础的灰狼算法,极大地提高了算法寻优能力,避免算法陷入局部最优;
47、2、利用智能优化算法的信息综合能力和强学习效率,对模糊控制系统的三个参数进行优化,使得优化之后的得到的模糊pid具有较好的自适应能力,保证了整个系统的鲁棒性,满足不同工件的加工需求,使得超精密数控车床自动化程度和加工效率提高。
技术特征:
1.一种基于igwo模糊pid自动调节真空吸盘控制方法,其特征在于,包括气缸(1)、气泵(2)、单向阀(3)、电磁阀(4)、真空发生器(5)、真空表(6)、真空吸盘(7)以及工控机(8);
2.根据权利要求1所述一种基于igwo模糊pid自动调节真空吸盘控制方法,其特征在于,pid控制器的控制方法为:
3.根据权利要求1所述一种基于igwo模糊pid自动调节真空吸盘控制方法,其特征在于,灰狼寻优算法即igwo算法模拟了自然界灰狼的领导层级和狩猎机制,四种类型的灰狼,如alpha(α),beta(β),delta(δ),and omega(ω)被用来模拟领导阶层;此外,还实现了狩猎的三个主要步骤:寻找猎物、包围猎物和攻击猎物;为了在设计gwo算法时对灰狼的社会等级进行数学建模,我们将最适解作为α;
4.根据权利要求1或3所述一种基于igwo模糊pid自动调节真空吸盘控制方法,其特征在于,其收敛因子a变化为:位置更新方式变为:
技术总结
本发明公开了一种基于IGWO模糊PID自动调节真空吸盘控制方法,气泵将气缸的气输送到电磁阀,电磁阀通入的气体使得真空发生器产生真空负压,进而大气压可以使真空吸盘吸住工件,真空表实时测量真空吸盘的真空度,将测量值传输到工控机与理想值对比,通过基于IGWO模糊PID计算器计算之后,发出控制指令到电磁阀,进而控制电磁阀的通断和压力的大小使得差值减小;本发明使用真空表作为反馈输入,然后通过模糊PID控制真空吸盘的真空度达期望的值,模糊控制器参数寻优以灰狼搜索算法为基础,改进其非线性调整收敛因子和位置更新方式,较基础的灰狼算法,极大地提高了算法寻优能力,避免算法陷入局部最优。
技术研发人员:李增强,刘新华
受保护的技术使用者:华粹智能装备有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!