一种自主设备作业方法、装置、设备及存储介质与流程
本申请实施例涉及设备控制,尤其涉及一种自主设备作业方法、装置、设备及存储介质。
背景技术:
1、现有农业自主设备的作业通常采用手机app或者遥控器进行控制,自主设备作业效率相比传统农业机械作业效率得到了较大的提升。例如用户可通过手机app或者遥控器向自主设备发送控制指令选择需要进行作业的地块,并控制自主设备在选中的地块上进行作业。
2、但是,目前自主设备的作业控制需要依赖于手机app或者遥控器等遥控设备,自主设备的作业控制效率较低。
技术实现思路
1、本申请实施例提供一种自主设备作业方法、装置、设备及存储介质,以解决相关技术中自主设备的作业控制需要依赖于遥控设备,自主设备的作业控制效率较低的技术问题,提高自主设备的作业控制效率。
2、在第一方面,本申请实施例提供了一种自主设备作业方法,包括:
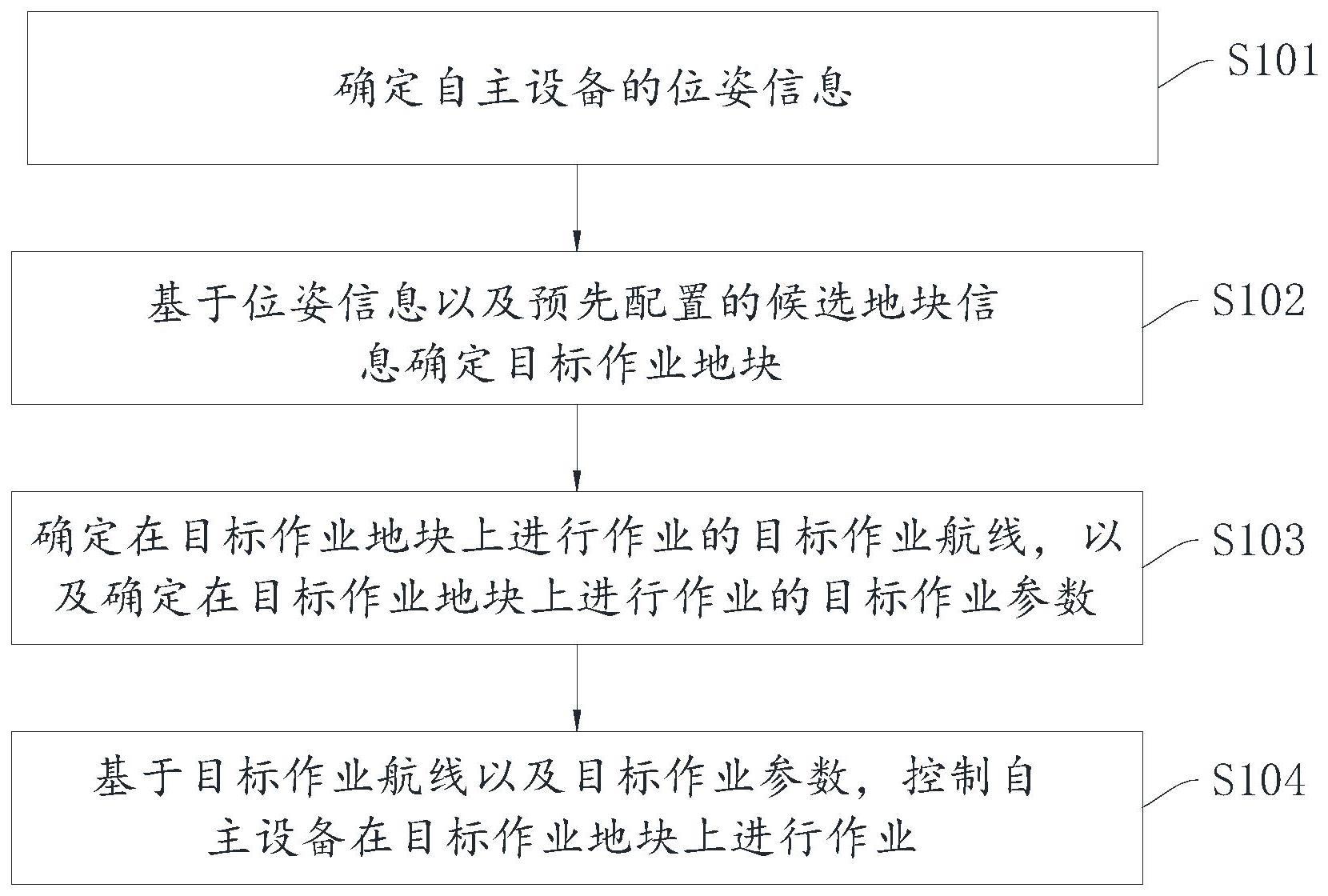
3、确定自主设备的位姿信息;
4、基于所述位姿信息以及预先配置的候选地块信息确定目标作业地块;
5、确定在所述目标作业地块上进行作业的目标作业航线,以及确定在所述目标作业地块上进行作业的目标作业参数;
6、基于所述目标作业航线以及所述目标作业参数,控制所述自主设备在所述目标作业地块上进行作业。
7、在第二方面,本申请实施例提供了一种自主设备作业装置,包括位姿确定模块、地块确定模块、设备配置模块和作业控制模块,其中:
8、所述位姿确定模块,用于确定自主设备的位姿信息;
9、所述地块确定模块,用于基于所述位姿信息以及预先配置的候选地块信息确定目标作业地块;
10、所述设备配置模块,用于确定在所述目标作业地块上进行作业的目标作业航线,以及确定在所述目标作业地块上进行作业的目标作业参数;
11、所述作业控制模块,用于基于所述目标作业航线以及所述目标作业参数,控制所述自主设备在所述目标作业地块上进行作业。
12、在第三方面,本申请实施例提供了一种自主设备,包括:存储器以及一个或多个处理器;
13、所述存储器,用于存储一个或多个程序;
14、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如第一方面所述的自主设备作业方法。
15、在第四方面,本申请实施例提供了一种存储计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行如第一方面所述的自主设备作业方法。
16、本申请实施例通过根据自主设备的位姿信息以及预先配置的候选地块信息确定目标作业地块,并确定在目标作业地块上进行作业的目标作业航线以及目标作业参数,并基于目标作业航线和目标作业参数控制自主设备在目标作业地块上进行作业,不需要通过遥控设备进行作业地块的选择,用户通过控制自主设备的位姿即可实现对目标作业地块的配置,实现对自主设备作业的快速控制,有效提高自主设备的作业控制效率。
技术特征:
1.一种自主设备作业方法,其特征在于,包括:
2.根据权利要求1所述的自主设备作业方法,其特征在于,所述确定在所述目标作业地块上进行作业的目标作业参数,包括:
3.根据权利要求2所述的自主设备作业方法,其特征在于,所述基于所述参数设置操作确定在所述目标作业地块上进行作业的目标作业参数之前,还包括:
4.根据权利要求1所述的自主设备作业方法,其特征在于,所述确定在所述目标作业地块上进行作业的目标作业参数,包括:
5.根据权利要求1所述的自主设备作业方法,其特征在于,所述确定自主设备的位姿信息之后,还包括:
6.根据权利要求1所述的自主设备作业方法,其特征在于,所述确定在所述目标作业地块上进行作业的目标作业参数之后,还包括:
7.根据权利要求1所述的自主设备作业方法,其特征在于,所述基于所述目标作业航线以及所述目标作业参数,控制所述自主设备在所述目标作业地块上进行作业之前,还包括:
8.根据权利要求1所述的自主设备作业方法,其特征在于,所述位姿信息包括位置信息,所述基于所述位姿信息以及预先配置的候选地块信息确定目标作业地块,包括:
9.根据权利要求1所述的自主设备作业方法,其特征在于,所述位姿信息包括朝向信息,所述基于所述位姿信息以及预先配置的候选地块信息确定目标作业地块,包括:
10.根据权利要求9所述的自主设备作业方法,其特征在于,所述确定所述自主设备所指向的目标作业地块,包括:
11.一种自主设备作业装置,其特征在于,包括位姿确定模块、地块确定模块、设备配置模块和作业控制模块,其中:
12.一种自主设备,其特征在于,包括:存储器以及一个或多个处理器;
13.一种存储计算机可执行指令的存储介质,其特征在于,所述计算机可执行指令在由计算机处理器执行时用于执行如权利要求1-10任一项所述的自主设备作业方法。
技术总结
本申请实施例公开了一种自主设备作业方法、装置、设备及存储介质。本申请实施例提供的技术方案通过根据自主设备的位姿信息以及预先配置的候选地块信息确定目标作业地块,并确定在目标作业地块上进行作业的目标作业航线以及目标作业参数,并基于目标作业航线和目标作业参数控制自主设备在目标作业地块上进行作业,不需要通过遥控设备进行作业地块的选择,用户通过控制自主设备的位姿即可实现对目标作业地块的配置,实现对自主设备作业的快速控制,有效提高自主设备的作业控制效率。
技术研发人员:刘庆飞,陈有生,黎赣彤,黄志鑫
受保护的技术使用者:广州极飞科技股份有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!