一种利用猴车系统进行驱动的矿用巡检机器人的制作方法
1.本实用新型属于监控设备领域,具体说是一种利用猴车系统进行驱动的矿用巡检机器人。
背景技术:
2.猴车的正式全称为矿山架空乘人索道,主要用于地下矿山辅助运输工人。将钢丝绳安装在驱动轮、托绳轮、压绳轮、迂回轮上并经张紧装置拉紧后,由驱动装置输出动力带动驱动轮和钢丝绳运行,从而实现输送矿工的功能。用地下矿用架空索道来输送矿工,其目的是缩短矿工上下井的路途时间,减轻矿工上下井的体能消耗。当前,要大力发展和推广巡检机器人,践行“机器换人”的战略。当猴车巷道需要安装巡检机器人时,由于猴车系统占据了巷道很大空间,如果安装轨道式巡检机器人,需要协调空间甚至拆除(或迁移)猴车,以便为巡检机器人轨道腾出空间,现场改动量大,既不方便也不经济;如果使用地面轮式巡检机器人,则机器人会占据猴车乘坐者的地面避险空间,当遇到紧急状况乘坐者紧急跳车时,有可能撞到地面上的机器人及其附属物,存在人身安全风险。
技术实现要素:
3.为解决上述技术问题,本实用新型提供了一种利用猴车系统进行驱动的矿用巡检机器人,该巡检机器人取消了驱动机构,直接利用猴车系统进行驱动,省去了原有轨道式巡检机器人所用的轨道或轮式巡检机器人的轮式驱动系统,最大限度地降低了巷道改造要求。
4.本实用新型采用的技术方案是:一种利用猴车系统进行驱动的矿用巡检机器人,该机器人包括机器人主体和固定机构。所述固定机构固定安装在机器人主体上;所述机器人主体包括红外摄像机、声音采集器、可见光摄像机和补光灯;所述红外摄像机安装在机器人主体上方中间位置,所述声音采集器和补光灯分别安装在红外摄像机的两侧,所述可见光摄像机安装在声音采集器的下方;
5.所述固定机构由固定梁架、固定梁架压块、下固定块和下固定块压板组成;所述固定梁架安装在机器人主体的上方,下固定块安装在机器人主体背面的下端,通过固定梁架与固定梁架压块的配合以及下固定块与下固定块压板的配合,将机器人主体压紧固定在猴车所配的座椅杆上。
6.所述红外摄像机用于采集巷道内红外图像,所述声音采集器用于采集巷道内声音信息,所述可见光摄像机用于采集巷道内视频图像,所述补光灯用于增加可见光摄像机采集视频时的亮度。
7.本实用新型的有益效果是:该巡检机器人挂载在猴车自带的座椅杆上,对现场空间的影响降到了最小,避免了对猴车巷道进行协调与改造;直接利用猴车系统进行驱动,省去了机器人主体的驱动机构,降低了成本,提高了可靠性;同时,避免了对猴车乘坐者避险空间的占用,提高了安全性。
附图说明
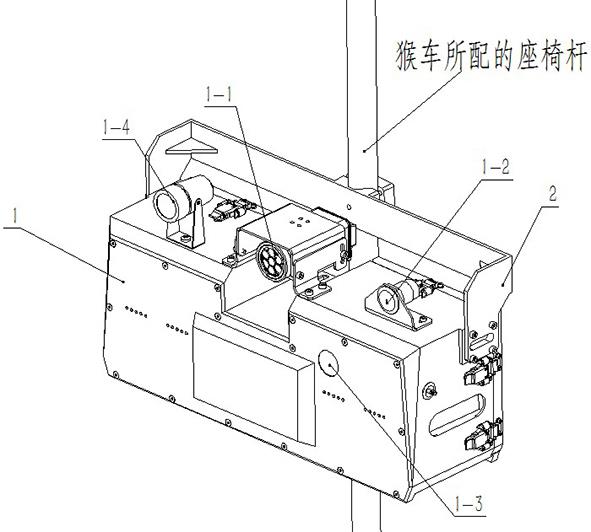
8.图1是利用猴车系统进行驱动的矿用巡检机器人正面立体示意图;
9.图2是利用猴车系统进行驱动的矿用巡检机器人背面立体示意图。
具体实施方式
10.下面结合附图和具体实施方式对本实用新型作进一步的描述。
11.如图1所示,一种利用猴车系统进行驱动的矿用巡检机器人,该巡检机器人包括:机器人主体1和固定机构2;所述固定机构2固定安装在机器人主体1上;所述机器人主体1包括红外摄像机1-1、声音采集器1-2、可见光摄像机1-3和补光灯1-4;所述红外摄像机1-1安装在机器人主体1上方中间位置,所述声音采集器1-2和补光灯1-4分别安装在红外摄像机1-1的两侧,所述可见光摄像机1-3安装在声音采集器1-2的下方。
12.如图2所示,所述固定机构2由固定梁架2-1、固定梁架压块2-2、下固定块2-3和下固定块压板2-4组成;所述固定梁架2-1安装在机器人主体1的上方,下固定块2-3安装在机器人主体1背面的下端,通过固定梁架2-1与固定梁架压块2-2的配合以及下固定块2-3与下固定块压板2-4的配合,将机器人主体1压紧固定在猴车所配的座椅杆上。
13.本实用新型的工作过程是:在使用本矿用巡检机器人之前,先通过固定机构2将机器人主体1固定安装在猴车所配的座椅杆上,机器人主体1的正面朝向猴车移动的方向。猴车运行时,矿用巡检机器人与猴车所配的座椅杆一起向前移动。在猴车运行过程中,所述红外摄像机1-1用于采集巷道内红外图像,所述声音采集器1-2用于采集巷道内声音信息,所述可见光摄像机1-3用于采集巷道内视频图像,所述补光灯1-4用于增加可见光摄像机采集视频时的亮度。
14.本实用新型所述并不限于具体实施方式所述的实施例,只要是本领域技术人员根据本实用新型案得出其他的实施方式,同样属于本实用新型的技术创新及保护的范围。
技术特征:
1.一种利用猴车系统进行驱动的矿用巡检机器人,其特征在于:该巡检机器人包括:机器人主体(1)和固定机构(2);所述固定机构(2)固定安装在机器人主体(1)上;所述机器人主体(1)包括红外摄像机(1-1)、声音采集器(1-2)、可见光摄像机(1-3)和补光灯(1-4);所述红外摄像机(1-1)安装在机器人主体(1)上方中间位置,所述声音采集器(1-2)和补光灯(1-4)分别安装在红外摄像机(1-1)的两侧,所述可见光摄像机(1-3)安装在声音采集器(1-2)的下方;所述固定机构(2)由固定梁架(2-1)、固定梁架压块(2-2)、下固定块(2-3)和下固定块压板(2-4)组成;所述固定梁架(2-1)安装在机器人主体(1)的上方,下固定块(2-3)安装在机器人主体(1)背面的下端,通过固定梁架(2-1)与固定梁架压块(2-2)的配合以及下固定块(2-3)与下固定块压板(2-4)的配合,将机器人主体(1)压紧固定在猴车所配的座椅杆上。
技术总结
本实用新型公开了一种利用猴车系统进行驱动的矿用巡检机器人,该巡检机器人包括:机器人主体和固定机构。所述固定机构安装在机器人主体上;所述机器人主体包括红外摄像机、声音采集器、可见光摄像机和补光灯;所述固定机构由固定梁架、固定梁架压块、下固定块和下固定块压板组成,所述固定梁架安装在机器人主体的上方,下固定块安装在机器人主体背面的下端,通过固定梁架压块和下固定块压板将机器人主体压紧固定在猴车所配的座椅杆上。该巡检机器人直接利用猴车系统进行驱动,不仅省去了自身的驱动系统,而且最大限度地降低了巷道改造要求。要求。要求。
技术研发人员:王金国 王小永 路万忠 欧文 张刚刚 朱鹏 吴文宝
受保护的技术使用者:中信重工开诚智能装备有限公司
技术研发日:2022.09.21
技术公布日:2022/12/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1