一种无人驾驶蔬菜运输车的制作方法
1.本实用新型涉及无人驾驶运输车本体技术领域,特别涉及一种无人驾驶蔬菜运输车。
背景技术:
2.在温室大棚中,种植户采摘蔬菜时,会将采摘后的蔬菜放在随身携带的桶或篮子中,当桶或篮子装满后,由种植户提到蔬菜集中点。在整个蔬菜收获的过程中,需要种植户频繁的在大棚内外来回搬运,整个过程劳动强度大且效率低下,需要大量的人工对农作进行采摘和搬运,用人成本和时间成本较大,因此需要一种智能化的蔬菜运输车本体,能够运输大棚内采摘的蔬菜,提高工作效率。
3.针对以上问题,现需提供一种无人驾驶蔬菜运输车。
技术实现要素:
4.本实用新型旨在提供一种无人驾驶蔬菜运输车,能够运输大棚内采摘的蔬菜,提高工作效率。
5.本实用新型提供的技术方案为:一种无人驾驶蔬菜运输车,包括运输车本体、驱动电机、转向电机,所述驱动电机用于驱动运输车本体,所述转向电机用于运输车本体转向,还包括导线、电磁导航信号源、定位卡和车载vcu,所述导线和电磁导航信号源预埋于大棚内部道路上,所述定位卡设置于车辆停止处,所述运输车本体前端设置有定位卡读取器,所述定位卡读取器用于读取定位卡信息,所述运输车本体前后两端各设置有电磁传感器,所述导线和电磁传感器均与电磁导航信号源连接,所述驱动电机、转向电机、电磁传感器、定位卡读取器均与车载vcu连接。
6.通过采用上述技术方案,导线和电磁导航信号源预埋于大棚内部道路上,导线作为无人驾驶蔬菜运输车的导航路径,最终连接在电磁导航信号源上,由电磁导航信号源发送信号,设置于运输车本体前后两端的电磁传感器检测到信号并确认运输车本体与导线之间位置关系形成路径信息,电磁传感器将信息输出给车载vcu,车载vcu根据电磁传感器反馈的信息通过控制转向电机控制车辆的转向,调整车辆跟随预设导线行走,当定位卡读取器读取到定位卡信息后,车载vcu控制驱动电机关闭。本实用新型利用预埋导线、电磁导航信号源和电磁传感器能将运输车本体路径信息传输至车载vcu,并由车载vcu控制运输车本体的行车路线,实现了车辆的自动化和智能化,提高了采摘蔬菜运输的工作效率。
7.作为本实用新型的进一步设置,所述电磁传感器对称安装于运输车本体底部中间位置。
8.作为本实用新型的进一步设置,所述定位卡读取器安装于运输车本体底部一侧。
9.通过采用上述技术方案,运输车本体通过底部中间对称设置的电磁传感器行车路线更加稳定,运输车本体底部一侧设置的定位卡读取器便于读取定位卡。
10.作为本实用新型的进一步设置,所述运输车本体前端上方固定设置有车辆控制
箱。
11.作为本实用新型的进一步设置,所述车辆控制箱上依次设置有前进按钮、停止按钮和后退按钮。
12.通过采用上述技术方案,车辆控制箱上设置的前进按钮用于控制车辆向前行走,停止按钮用于控制车辆停止,后退按钮用于控制车辆向后行走,当车辆在大棚内行走时,可根据需要通过不同按钮控制车辆的启停、前进和后退。
13.与现有技术相比,本实用新型的有益效果在于:
14.1、本实用新型提供的一种无人驾驶蔬菜运输车,利用预埋导线、电磁导航信号源和电磁传感器能将运输车本体路径信息传输至车载vcu,并由车载vcu控制运输车本体的行车路线,实现了车辆的自动化和智能化,提高了采摘蔬菜运输的工作效率。
15.2、本实用新型提供的一种无人驾驶蔬菜运输车,运输车本体通过底部中间对称设置的电磁传感器行车路线更加稳定,运输车本体底部一侧设置的定位卡读取器便于读取定位卡。
16.3、本实用新型提供的一种无人驾驶蔬菜运输车,车辆控制箱上设置的前进按钮用于控制车辆向前行走,停止按钮用于控制车辆停止,后退按钮用于控制车辆向后行走,当车辆在大棚内行走时,可根据需要通过不同按钮控制车辆的启停、前进和后退。
附图说明
17.图1是本实用新型一种无人驾驶蔬菜运输车控制示意图;
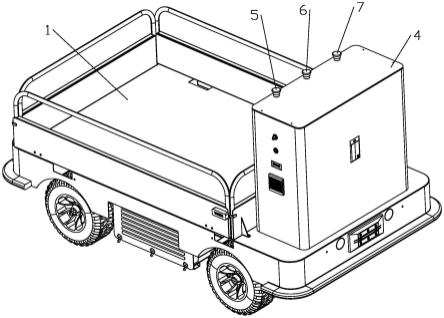
18.图2是本实用新型运输车立体结构示意图
19.图3是本实用新型运输车底部结构示意图。
20.附图中,1、运输车本体;2、定位卡读取器;3、电磁传感器;4、车辆控制箱;5、前进按钮;6、停止按钮;7、后退按钮。
具体实施方式
21.以下结合附图和具体实施例对本实用新型作进一步说明。
22.参照图1~图3,本实用新型提供的一种无人驾驶蔬菜运输车,包括运输车本体1、驱动电机、转向电机,所述驱动电机用于驱动运输车本体1,所述转向电机用于运输车本体1转向,其特征在于:还包括导线、电磁导航信号源、定位卡和车载vcu,所述导线和电磁导航信号源预埋于大棚内部道路上,所述定位卡设置于车辆停止处,所述运输车本体1前端设置有定位卡读取器2,所述定位卡读取器2用于读取定位卡信息,所述运输车本体1前后两端各设置有电磁传感器3,所述导线和电磁传感器3均与电磁导航信号源连接,所述驱动电机、转向电机、电磁传感器3、定位卡读取器2均与车载vcu连接。采用上述技术方案,导线和电磁导航信号源预埋于大棚内部道路上,导线作为无人驾驶蔬菜运输车的导航路径,最终连接在电磁导航信号源上,由电磁导航信号源发送信号,设置于运输车本体1前后两端的电磁传感器3检测到信号并确认运输车本体1与导线之间位置关系形成路径信息,电磁传感器3将信息输出给车载vcu,车载vcu根据电磁传感器3反馈的信息通过控制转向电机控制车辆的转向,调整车辆跟随预设导线行走,当定位卡读取器2读取到定位卡信息后,车载vcu控制驱动电机关闭。本实用新型利用预埋导线、电磁导航信号源和电磁传感器3能将运输车本体1路
径信息传输至车载vcu,并由车载vcu控制运输车本体1的行车路线,实现了车辆的自动化和智能化,提高了采摘蔬菜运输的工作效率。
23.更进一步地,所述电磁传感器3对称安装于运输车本体1底部中间位置,所述定位卡读取器2安装于运输车本体1底部一侧。采用上述技术方案,运输车本体1通过底部中间对称设置的电磁传感器3行车路线更加稳定,运输车本体1底部一侧设置的定位卡读取器2便于读取定位卡。
24.更进一步地,所述运输车本体1前端上方固定设置有车辆控制箱4,所述车辆控制箱4上依次设置有前进按钮5、停止按钮6和后退按钮7。采用上述技术方案,车辆控制箱4上设置的前进按钮5用于控制车辆向前行走,停止按钮6用于控制车辆停止,后退按钮7用于控制车辆向后行走,当车辆在大棚内行走时,可根据需要通过不同按钮控制车辆的启停、前进和后退。
技术特征:
1.一种无人驾驶蔬菜运输车,包括运输车本体(1)、驱动电机、转向电机,所述驱动电机用于驱动运输车本体(1),所述转向电机用于运输车本体(1)转向,其特征在于:还包括导线、电磁导航信号源、定位卡和车载vcu,所述导线和电磁导航信号源预埋于大棚内部道路上,所述定位卡设置于车辆停止处,所述运输车本体(1)前端设置有定位卡读取器(2),所述定位卡读取器(2)用于读取定位卡信息,所述运输车本体(1)前后两端各设置有电磁传感器(3),所述导线和电磁传感器(3)均与电磁导航信号源连接,所述驱动电机、转向电机、电磁传感器(3)、定位卡读取器(2)均与车载vcu连接。2.根据权利要求1所述的一种无人驾驶蔬菜运输车,其特征在于:所述电磁传感器(3)对称安装于运输车本体(1)底部中间位置。3.根据权利要求1所述的一种无人驾驶蔬菜运输车,其特征在于:所述定位卡读取器(2)安装于运输车本体(1)底部一侧。4.根据权利要求1所述的一种无人驾驶蔬菜运输车,其特征在于:所述运输车本体(1)前端上方固定设置有车辆控制箱(4)。5.根据权利要求4所述的一种无人驾驶蔬菜运输车,其特征在于:所述车辆控制箱(4)上依次设置有前进按钮(5)、停止按钮(6)和后退按钮(7)。
技术总结
本实用新型涉及一种无人驾驶蔬菜运输车,包括运输车本体、驱动电机、转向电机,所述驱动电机用于驱动运输车本体,所述转向电机用于运输车本体转向,还包括导线、电磁导航信号源、定位卡和车载VCU,所述导线和电磁导航信号源预埋于大棚内部道路上,所述定位卡设置于车辆停止处,所述运输车本体前端设置有定位卡读取器,所述定位卡读取器用于读取定位卡信息,所述运输车本体前后两端各设置有电磁传感器,所述导线和电磁传感器均与电磁导航信号源连接,所述驱动电机、转向电机、电磁传感器、定位卡读取器均与车载VCU连接。本实用新型旨在提供一种无人驾驶蔬菜运输车,能够运输大棚内采摘的蔬菜,提高工作效率。提高工作效率。提高工作效率。
技术研发人员:郑超 高健博 杨秋男 何晓龙
受保护的技术使用者:卓斐(东营)农业科技研究院有限公司
技术研发日:2022.10.24
技术公布日:2023/1/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1