矫平小车自动控制系统的制作方法
本技术涉及自动控制的,特别是涉及一种矫平小车自动控制系统。
背景技术:
1、由于焊接高温导致钢板整体冷热不均,在船舶钢板焊接处会形成塑性形变,进而产生非有利应力。因此,需要使用一些方法来消除钢板的应力。由于焊接处一般为线型缝隙,且缝隙长度较长,一般在20米以上,通常使用装载有应力消除设备的小车来进行应力消除。然而,小车如何沿着缝隙前进是需要解决的难点。
技术实现思路
1、鉴于以上所述现有技术的缺点,本实用新型的目的在于提供一种矫平小车自动控制系统,能够控制矫平小车能够沿着所需方向前行,满足实际应用的需求。
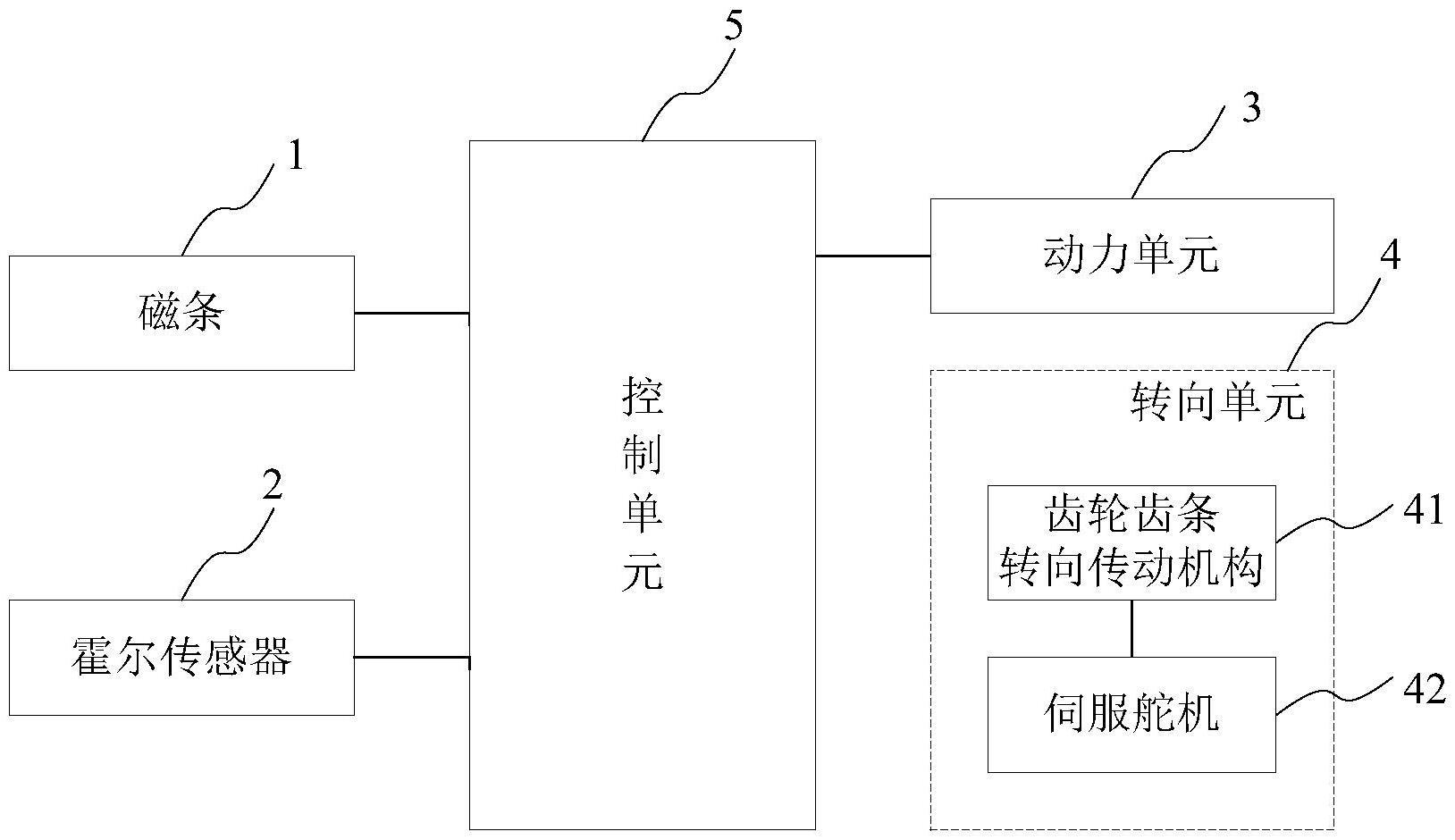
2、本实用新型提供一种矫平小车自动控制系统,所述系统包括;磁条,设置在预设前进路线上;霍尔传感器,设置在矫平小车底部纵向轴线上且位于所述磁条上方,用于获取所述磁条的感应信息;动力单元,用于驱动所述矫平小车的车轮;转向单元,用于控制所述车轮的左右转动,包括齿轮齿条转向传动机构和伺服舵机;控制单元与所述霍尔传感器、所述动力单元和所述转向单元相连,用于控制所述动力单元驱动所述车轮;根据所述感应信息判断所述霍尔传感器是否位于所述磁条的正上方,并在不位于所述磁条的正上方时,通过所述转向单元调整所述矫平小车的方向直至所述霍尔传感器位于所述磁条的正上方。
3、于本实用新型一实施例中,所述霍尔传感器设置在所述矫平小车底部中心位置处。
4、于本实用新型一实施例中,所述霍尔传感器与所述控制单元的rs485通信接口相连。
5、于本实用新型一实施例中,所述动力单元采用一体式双驱动减速无刷电机。
6、于本实用新型一实施例中,所述动力单元与所述控制单元的pwm接口相连。
7、于本实用新型一实施例中,所述伺服舵机与所述控制单元的pwm接口相连。
8、于本实用新型一实施例中,所述控制单元采用arm单片机。
9、于本实用新型一实施例中,还包括电源单元,与所述控制单元相连,用于提供电源。
10、于本实用新型一实施例中,还包括遥控器,与所述控制单元相连,用于发送控制信息至所述控制单元。
11、于本实用新型一实施例中,所述矫平小车包括对称设置的两个前轮和两个后轮,两个前轮之间的距离为d,所述霍尔传感器到所述两个前轮和两个后轮的轮轴所在平面的距离为l,l/d=1.5。
12、如上所述,本实用新型的矫平小车自动控制系统,具有以下有益效果:
13、(1)能够控制矫平小车能够沿着所需方向如焊接缝隙前行,且速度可调,满足实际应用的需求;
14、(2)相较于沿着轨道前行的方式,无需搬运轨道,解放了人力,降低了工作成本,提高了作业时效;
15、(3)无需手动操作,自动化程度高,极大地提升了用户体验。
技术特征:
1.一种矫平小车自动控制系统,其特征在于:所述系统包括;
2.根据权利要求1所述的矫平小车自动控制系统,其特征在于:所述霍尔传感器设置在所述矫平小车底部中心位置处。
3.根据权利要求1所述的矫平小车自动控制系统,其特征在于:所述霍尔传感器与所述控制单元的rs485通信接口相连。
4.根据权利要求1所述的矫平小车自动控制系统,其特征在于:所述动力单元采用一体式双驱动减速无刷电机。
5.根据权利要求1所述的矫平小车自动控制系统,其特征在于:所述动力单元与所述控制单元的pwm接口相连。
6.根据权利要求1所述的矫平小车自动控制系统,其特征在于:所述伺服舵机与所述控制单元的pwm接口相连。
7.根据权利要求1所述的矫平小车自动控制系统,其特征在于:所述控制单元采用arm单片机。
8.根据权利要求1所述的矫平小车自动控制系统,其特征在于:还包括电源单元,与所述控制单元相连,用于提供电源。
9.根据权利要求1所述的矫平小车自动控制系统,其特征在于:还包括遥控器,与所述控制单元相连,用于发送控制信息至所述控制单元。
10.根据权利要求1所述的矫平小车自动控制系统,其特征在于:所述矫平小车包括对称设置的两个前轮和两个后轮,两个前轮之间的距离为d,所述霍尔传感器到所述两个前轮和两个后轮的轮轴所在平面的距离为l,l/d=1.5。
技术总结
本技术提供一种矫平小车自动控制系统,包括;磁条,设置在预设前进路线上;霍尔传感器,设置在小车底部纵向轴线上且位于磁条上方,用于获取所述磁条的感应信息;动力单元,用于驱动所述小车的车轮;转向单元,用于控制所述车轮的左右转动,包括齿轮齿条转向传动机构和伺服舵机;控制单元与所述霍尔传感器、所述动力单元和所述转向单元相连,用于控制所述动力单元驱动所述车轮;根据所述感应信息判断所述霍尔传感器是否位于所述磁条的正上方,并在不位于所述磁条的正上方时,通过所述转向单元调整所述小车的方向直至所述霍尔传感器位于所述磁条的正上方。本技术的矫平小车自动控制系统能够控制矫平小车能够沿着所需方向前行,满足实际应用的需求。
技术研发人员:刘博,杨合新,王宣宣,殷凯华,叶孙斌,张明,周全
受保护的技术使用者:上海升产自动化科技有限公司
技术研发日:20221221
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!