一种同步控制装置的制作方法
本公开涉及计算机,具体而言,涉及一种同步控制装置。
背景技术:
1、相关技术中,在使用同步机构控制运动组件同步运动时,往往是采用机械联动式的方式,以由连杆等组件组成的复杂机械结构控制运动组件同步运动,这种方式虽然能够实现对于运动机构的同步控制,但由于机械结构较为复杂,因此具有安装调试困难、后期维护成本高等问题,且难以实现高精度的控制。
技术实现思路
1、有鉴于此,本申请的目的在于提供一种同步控制装置,以通过多个控制器实现对于运动组件的同步控制,便于开发人员进行维护,且能够实现高精度的控制。
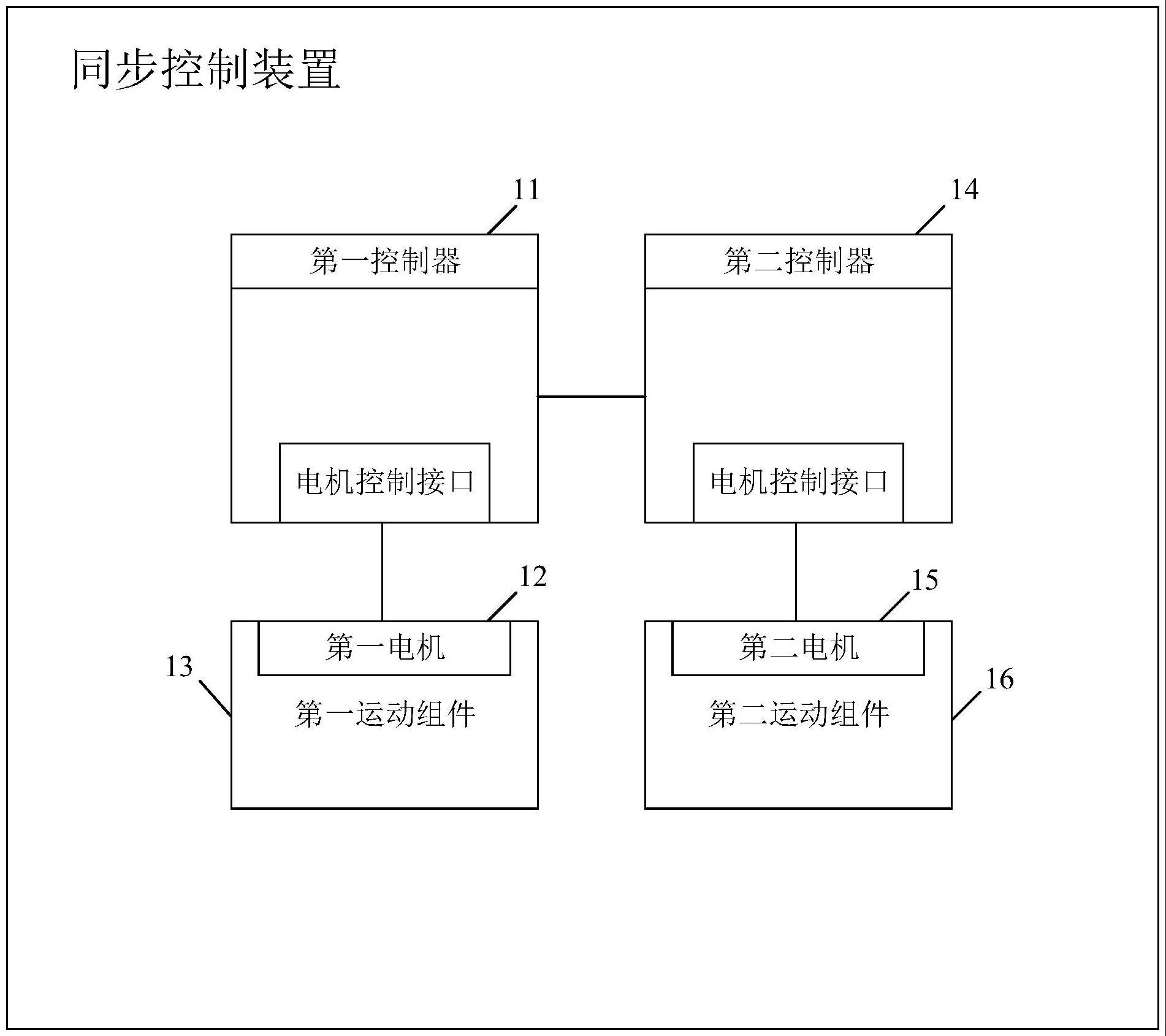
2、第一方面,本公开实施例提供了一种同步控制装置,所述装置包括:第一控制器、与所述第一控制器连接的第一电机、与所述第一电机连接的第一运动组件、至少一个第二控制器、与所述第二控制器连接的第二电机、以及与所述第二电机连接的第二运动组件;其中,
3、所述第一控制器,配置为在接收到同步运动指令后,将所述同步运动指令发送至所述至少一个第二控制器,同时对所述同步运动指令进行解析得到初始化参数,并根据所述初始化参数对所述第一电机以进行初始化;在检测到所述第一电机和所述第二电机完成初始化之后,向所述第一电机发送启动信号,以及通过所述第二控制器向所述第二电机发送启动指令,以控制所述第一电机带动的第一运动组件,与所述第二电机带动的第二运动组件进行同步运动;
4、所述第二控制器,配置为在接收到所述第一控制器发送的同步运动指令后,对所述同步运动指令进行解析得到初始化参数,并根据所述初始化参数对所述第二电机进行初始化,在接收到所述第一控制器发送的启动指令后,向所述第二电机发送启动信号,控制所述第二电机带动所述第二运动组件进行运动。
5、结合第一方面,本申请实施例提供了第一方面的第一种可能的实施方式,任一控制器还配置为:
6、响应于检测到该控制器控制的运动组件运动异常或者响应于检测到该控制器异常,控制与该控制器连接的电机停止运行;以及,将异常信息发送至除该控制器外的其他控制器,以使所述其他控制器控制其连接的电机停止运行。
7、结合第一方面的第一种可能的实施方式,本申请实施例提供了第一方面的第二种可能的实施方式,所述同步控制装置还包括编码器,所述编码器分别与电机和控制器连接,配置为检测所述电机带动运动组件运动时运动组件的运动信息;任一控制器,配置为:
8、通过与该控制器连接的编码器实时获取第一运动信息;
9、基于所述第一运动信息和所述初始化参数,确定与该控制器控制的运动组件是否运动异常。
10、结合第一方面的第二种可能的实施方式,本申请实施例提供了第一方面的第三种可能的实施方式,所述初始化参数包括电机控制参数;所述第一控制器,在将所述初始化参数发送至所述第一电机以进行初始化时,配置为:
11、根据所述电机控制参数对所述第一电机进行初始化;
12、所述第二控制器,在将所述初始化参数发送至所述第二电机以进行初始化时,配置为:
13、根据所述电机控制参数对所述第二电机进行初始化。
14、结合第一方面的第三种可能的实施方式,本申请实施例提供了第一方面的第四种可能的实施方式,任一控制器,配置为:
15、基于所述第一运动信息和所述电机控制参数,确定与该控制器控制的运动组件是否运动异常。
16、结合第一方面的第二种可能的实施方式,本申请实施例提供了第一方面的第五种可能的实施方式,所述第一控制器,配置为:
17、通过与各控制器连接的编码器分别实时获取第二运动信息;
18、将获取的各第二运动信息进行比对,确定各控制器控制的运动组件是否运动异常。
19、结合第一方面,本申请实施例提供了第一方面的第六种可能的实施方式,所述同步控制装置中还包括用于确定各运动组件位姿的位姿确定组件,所述位姿确定组件,配置为:
20、在电机按照所述初始化参数带动运动组件进行运动之前,确定各运动组件分别对应的位姿信息,以在各运动组件对应的位姿信息满足预设条件的情况下,控制电机按照所述初始化参数带动运动组件进行运动。
21、结合第一方面的第六种可能的实施方式,本申请实施例提供了第一方面的第七种可能的实施方式,任一控制器包括信号接口,所述位姿确定组件通过所述信号接口与该控制器连接;
22、所述位姿确定组件,配置为:
23、将该控制器控制的运动组件的位姿检测结果通过所述信号接口发送至该控制器,以通过该控制器发送至展示装置进行展示。
24、结合第一方面的第三种可能的实施方式,本申请实施例提供了第一方面的第八种可能的实施方式,所述初始化参数还包括编码器配置参数;任一控制器,配置为:
25、将所述编码器配置参数发送至与该控制器连接的编码器,以使所述编码器按照所述编码器配置参数进行初始化。
26、结合第一方面,本申请实施例提供了第一方面的第九种可能的实施方式,各运动组件配置为装载物料,各运动组件之间通过管道连接。
27、本公开提供的同步控制装置,可以在接收到同步运动指令后进行指令解析等操作完成对同步控制装置内各组件的参数初始化,并在初始化完成后,通过启动信息控制第一控制器和第二控制器同步控制第一运动组件和第二运动组件的同步运动,相较于使用传统的机械结构进行同步控制,使用控制器便于进行安装调试和维修,并且通过设置多个控制器还能够实现高精度的同步控制。
28、为使本申请的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种同步控制装置,其特征在于,所述装置包括:第一控制器、与所述第一控制器连接的第一电机、与所述第一电机连接的第一运动组件、至少一个第二控制器、与所述第二控制器连接的第二电机、以及与所述第二电机连接的第二运动组件;其中,
2.根据权利要求1所述的装置,其特征在于,任一控制器还配置为:
3.根据权利要求2所述的装置,其特征在于,所述同步控制装置还包括编码器,所述编码器分别与电机和控制器连接,配置为检测所述电机带动运动组件运动时运动组件的运动信息;任一控制器,配置为:
4.根据权利要求3所述的装置,其特征在于,所述初始化参数包括电机控制参数;
5.根据权利要求4所述的装置,其特征在于,任一控制器,配置为:
6.根据权利要求3所述的装置,其特征在于,所述第一控制器,配置为:
7.根据权利要求1所述的装置,其特征在于,所述同步控制装置中还包括用于确定各运动组件位姿的位姿确定组件,所述位姿确定组件,配置为:
8.根据权利要求7所述的装置,其特征在于,任一控制器包括信号接口,所述位姿确定组件通过所述信号接口与该控制器连接;
9.根据权利要求4所述的装置,其特征在于,所述初始化参数还包括编码器配置参数;任一控制器,配置为:
10.根据权利要求1所述的装置,其特征在于,各运动组件配置为装载物料,各运动组件之间通过管道连接。
技术总结
本公开提供了一种同步控制装置,其中,该装置包括:第一控制器、与所述第一控制器连接的第一电机、与所述第一电机连接的第一运动组件、至少一个第二控制器、与所述第二控制器连接的第二电机、以及与所述第二电机连接的第二运动组件。本技术在使用时,可以通过多个控制器实现对于运动组件的同步控制,便于开发人员进行维护,且能够实现高精度的控制。
技术研发人员:马永波,郭光辉,靳文昌,董康宁,赵利彬,付琰
受保护的技术使用者:郑州思昆生物工程有限公司
技术研发日:20221223
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!