系统、方法以及作业车辆与流程
本公开涉及系统、方法以及作业车辆。本申请对2021年3月31日在日本申请的特愿2021-061381号主张优先权,并将其内容援引于此。
背景技术:
1、在碎石现场、矿山等作业现场中,有时会导入作业车辆的自动驾驶系统。自动驾驶系统计算用于使作业车辆到达目的位置的轨道,并基于该轨道使作业车辆行驶。在专利文献1中公开了无人车辆的行驶路径生成方法所涉及的技术。
2、在先技术文献
3、专利文献
4、专利文献1:日本特开2010-073080号公报
技术实现思路
1、发明要解决的课题
2、用于供车辆自动行驶的轨道计算是优化问题。另外,在轨道的计算中,存在于作业现场的障碍物作为制约条件而给出。然而,用于轨道的搜索的数理模型由车辆的位置、姿势、转向角、速度、加速度等多维的向量表示,另外,存在障碍物的位置及形状未必简单而制约条件的非线性变高的可能性。因此,就轨道的计算而言,计算量变多,或者产生向局部解的收敛,因此难以在线地计算车辆的行驶轨道。另一方面,若为了削减计算量而降低模型的维数,则在所得到的轨道中,消减后的维度所涉及的动作有可能不连续。
3、本公开的目的在于提供能够以较少的计算量得到连续的轨道的轨道搜索装置以及轨道搜索方法。
4、用于解决课题的方案
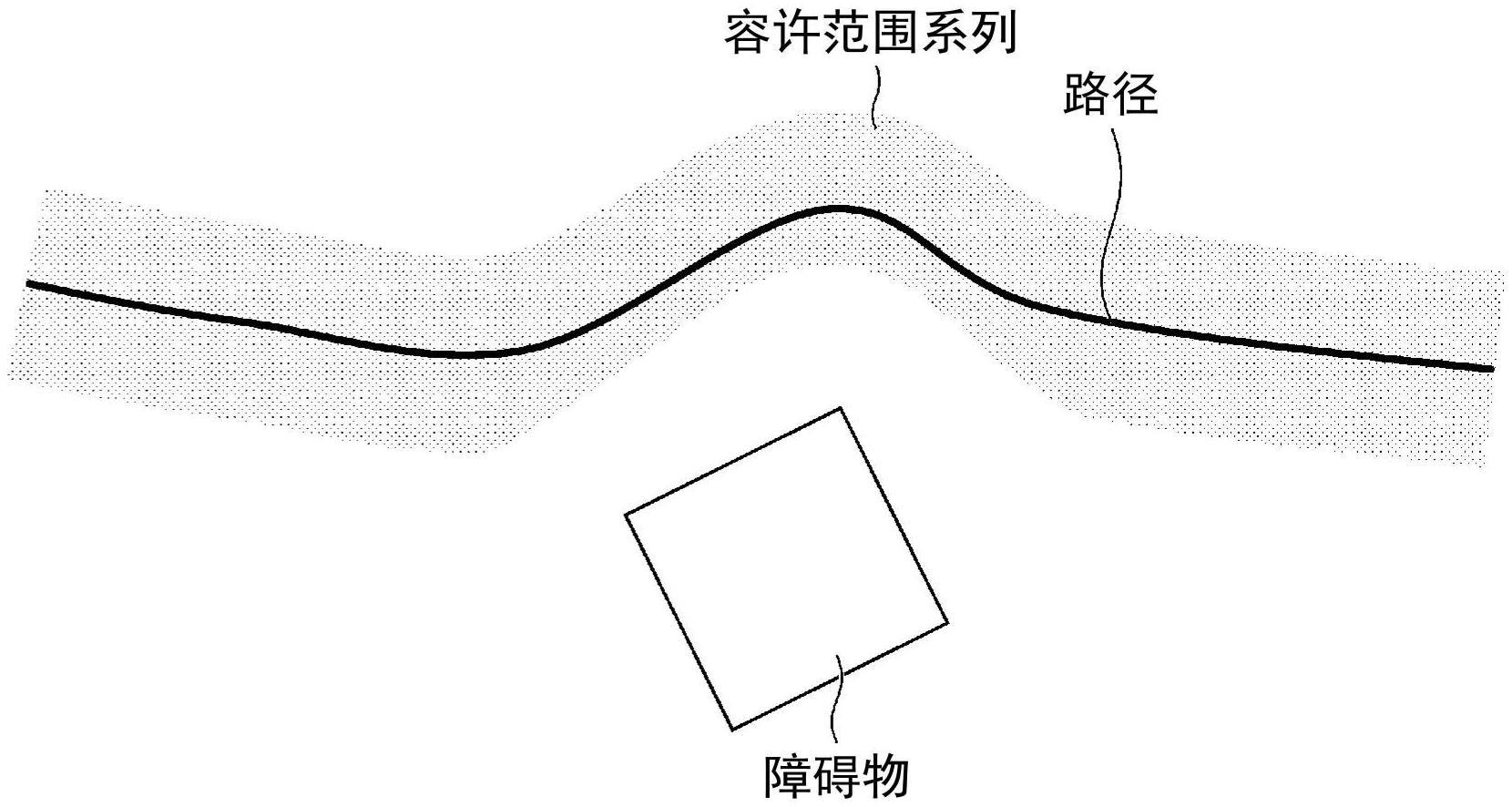
5、本发明的第一方案是搜索用于供车辆自动行驶的轨道的系统,且具备处理器。处理器具备:路径搜索部,其基于表示障碍物的位置的第一制约条件,搜索用于从车辆的初始位置向目标位置移动的路径、即以车辆的位置及姿势为要素的系列;制约条件生成部,其生成惩罚值根据距路径的偏离距离而增加的第二制约条件;轨道搜索部,其基于第二制约条件,搜索用于从车辆的初始位置向目标位置移动的轨道、即以车辆的位置、姿势、速度以及转向角为要素的系列。
6、本发明的第二方案是搜索用于供车辆自动行驶的轨道的方法。该方法包括以下的处理。第一处理基于表示障碍物的位置的第一制约条件,搜索用于从车辆的初始位置向目标位置移动的路径、即以所述车辆的位置及姿势为要素的系列。第二处理生成惩罚值根据距路径的偏离距离而增加的第二制约条件。第三处理基于第二制约条件,搜索用于从车辆的初始位置向目标位置移动的轨道、即以车辆的位置、姿势、速度以及转向角为要素的系列。
7、本发明的第三方案是作业车辆,且具备:车身;行驶装置,其用于使车身行驶;以及处理器。处理器具备:路径搜索部,其基于表示障碍物的位置的第一制约条件,搜索用于从作业车辆的初始位置向目标位置移动的路径、即以车辆的位置及姿势为要素的系列;制约条件生成部,其生成惩罚值根据距路径的偏离距离而增加的第二制约条件;轨道搜索部,其基于第二制约条件,搜索用于从作业车辆的初始位置向目标位置移动的轨道、即以作业车辆的位置、姿势、速度以及转向角为要素的系列;以及行驶控制部,其根据轨道而控制所述行驶装置。
8、发明效果
9、根据上述方式的至少一个,轨道搜索装置能够以较少的计算量得到连续的轨道。
技术特征:
1.一种系统,其是搜索用于供车辆自动行驶的轨道的系统,
2.根据权利要求1所述的系统,其中,
3.根据权利要求1或2所述的系统,其中,
4.根据权利要求3所述的系统,其中,
5.根据权利要求1至4中任一项所述的系统,其中,
6.一种方法,其是搜索用于供车辆自动行驶的轨道的方法,其中,
7.根据权利要求6所述的方法,其中,
8.根据权利要求6或7所述的方法,其中,
9.根据权利要求8所述的方法,其中,
10.根据权利要求6至9中任一项所述的方法,其中,
11.一种作业车辆,其具备:
技术总结
路径搜索部基于表示障碍物的位置的第一制约条件,搜索用于从车辆的初始位置向目标位置移动的路径、即以车辆的位置及姿势为要素的系列。制约条件生成部生成惩罚值根据距路径的偏离距离而增加的第二制约条件。轨道搜索部基于第二制约条件,搜索用于从车辆的初始位置向目标位置移动的轨道、即以车辆的位置、姿势、速度以及转向角为要素的系列。
技术研发人员:岩永圭弘,野寄敬博
受保护的技术使用者:株式会社小松制作所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!