用于生成和传递用于自动驾驶机动车的控制指令的装置和方法与流程
本发明设计一种用于生成和传递用于自动驾驶机动车的控制指令的装置和方法。
背景技术:
1、这样的装置必须相对于单个错误是容错的,即该装置必须能够例如使机动车安全停止或以其他方式继续安全驾驶。此类操纵也称为“残肢归航”、“残肢旁置”或“车道中断”。一种可能的方法是完全冗余,即两个系统并行工作。
技术实现思路
1、本发明基于如下技术问题,创造一种用于生成用于自动驾驶机动车的控制指令的改进的装置以及提供一种合适的方法供使用。
2、技术问题的解决方案通过一种带有权利要求1的特征的装置以及一种带有权利要求9的特征的方法解决。本发明的另外的有利的设计方案从从属权利要求得出。
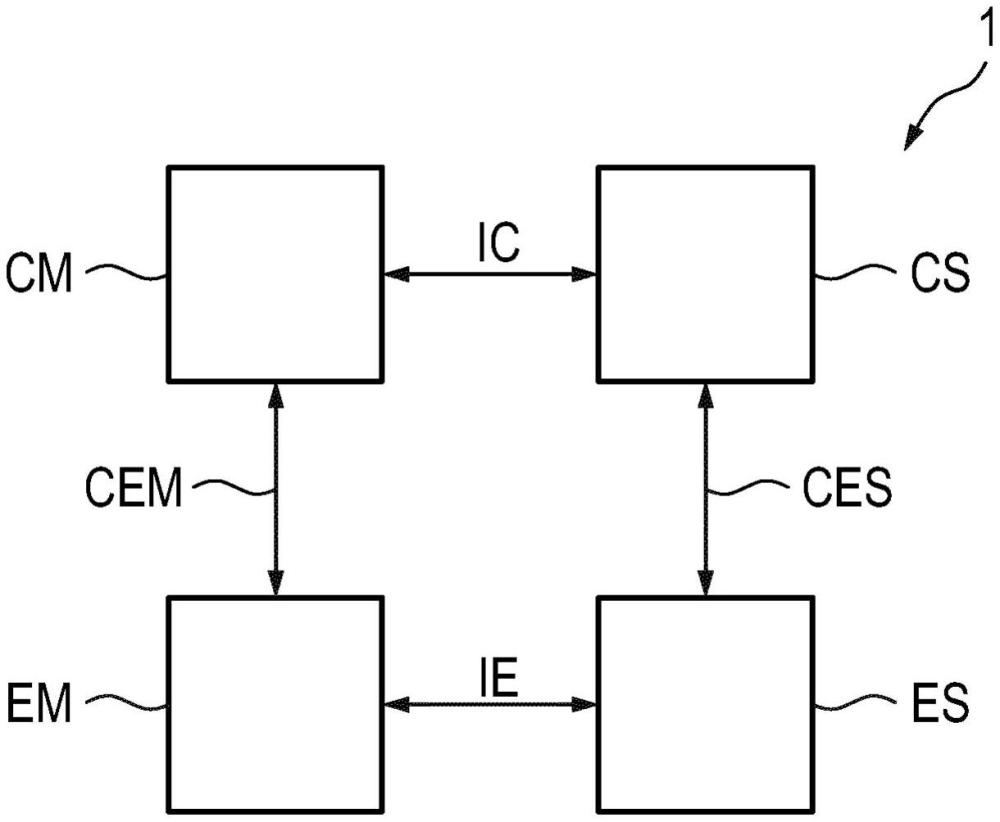
3、对此如此构造用于生成和传递用于自动驾驶机动车的控制指令的装置,接收至少环境数据和车辆状态数据,由此计算至少一个轨迹,计算用于至少一个执行器的对于实现轨迹所需的控制指令并将其传递到至少一个执行器处,其中装置包括至少一个第一子系统、第二子系统、第三子系统和第四子系统,其中第一子系统和第三子系统作为主控者工作且第二子系统和第四子系统作为从属者工作,其中第一子系统和第二子系统经由至少一个数据连接而连接且第三子系统和第四子系统经由另一数据连接而彼此连接,其中附加地第一子系统和第三子系统经由至少一个数据连接彼此连接并且第二子系统和第四子系统经由一数据连接彼此连接,其中第一子系统和第二子系统分别接收至少环境数据和车辆状态数据且第三子系统和第四子系统将至少控制指令传递到至少一个执行装置处,其中至少第一子系统和第三子系统对错误静默地构造,其中装置进一步如此构造,在子系统的单个错误中生成且传递至少一个控制指令,以便将机动车带到安全状态中。
4、第一至第四子系统在此也可视为网络中的节点。环境数据在此可来源于车辆侧的环境传感装置,其例如具有摄像头和/或雷达传感器和/或激光雷达传感器和/或超声波传感器。备选地或补充地,环境数据可来源于交通基础设施的外部传感器和/或其他机动车。车辆状态数据尤其是自动驾驶机动车的位置、速度和方向。在此,第一子系统和第二子系统可接收相同的环境数据和/或车辆状态数据或但是不同数据源的数据。第一子系统和第三子系统对错误静默,意味着,其在错误情况中“沉默”并且不再告知通讯装置。优选地,第一和第三子系统关联于第一电压供给装置且第二和第四子系统关联于第二电压供给装置,其中第一和第二电压供给装置彼此独立。但是也可能的是,每个子系统关联于自身的、独立的电压供给装置。
5、通过主从配置,第三和第四子系统可操控相同的执行装置,而不产生抵触,其中通过环形结构确保了,可始终计算和传递控制指令。可靠的状态也包含,机动车还可进一步自动驾驶(或者针对受限路段或者以受限性能或速度)。
6、优选地,第一和第二子系统分别计算至少一个轨迹且进一步优选地同样计算控制指令,其中然后第三和第四子系统仅负责至执行器的传递。由此,它们可然后非常简单和鲁棒地设计。
7、在一个实施形式中,第二和/或第四子系统也对错误静默地构造,从而与其相关可取消通过主控者的监控。在此,对错误静默的不同实现方案是可能的。在此,也可在子系统中进行不同的实现方案。如此,可以例如使用具有硬连线与门连接(又名关断路径)的看门狗电路,其中看门狗还可以布置在监控主控制器的子控制器中。
8、在另一实施形式中,装置如此构造,使得在双重错误中,其中至少不涉及第三子系统或第四子系统,由第三子系统或第四子系统生成针对紧急停止的控制指令。
9、在另一实施形式中,装置如此构造,使得在无错误的运行中针对执行装置的控制指令通过第二或第四子系统计算和传递。在此,第二和第四子系统可设计成相对于第一和第三子系统在计算能力上较高。第一和第三子系统然后可在结构上更简单地设计,从而其可靠性和容错率相应地提高。
10、在另一实施形式中附加地第一子系统与第四子系统连接且/或第二子系统与第三子系统连接。由此,一方面可加速在错误情况中的数据传输。
11、在另一实施形式中,第三子系统和第四子系统由分别至少两个单独的次级系统构成。次级系统例如是用于转向、制动、驱动或传动系统的操控单元。
12、鉴于本发明的根据方法的设计方案,完全参考前面的实施方案。
技术特征:
1.一种用于生成和传递用于自动驾驶机动车的控制指令的装置(1),其中所述装置(1)如此构造,以接收至少环境数据和车辆状态数据,由此计算至少一个轨迹,计算用于至少一个执行器的对于实现所述轨迹所需的控制指令并将其传递到至少一个执行器处,其中所述装置(1)包括至少一个第一子系统(cm)、第二子系统(cs)、第三子系统(em)和第四子系统(es),其中所述第一子系统(cm)和所述第三子系统(em)作为主控者工作且所述第二子系统(cs)和所述第四子系统(es)作为从属者工作,其中所述第一子系统(cm)和所述第二子系统(cs)经由至少一个数据连接(ic)而连接且所述第三子系统(em)和所述第四子系统(es)经由另一数据连接(ie)而彼此连接,其中附加地所述第一子系统(cm)和所述第三子系统(em)经由至少一个数据连接(cem)而彼此连接且所述第二子系统(cs)和所述第四子系统(es)经由一数据连接(ces)而彼此连接,其中所述第一子系统(cm)和所述第二子系统(cs)分别接收至少环境数据和车辆状态数据且所述第三子系统(em)和所述第四子系统(es)将至少所述控制指令传递到所述至少一个执行装置处,其中至少所述第一子系统(cm)和所述第三子系统(em)对错误静默地构造,其中所述装置(1)进一步如此构造,在子系统(cm,cs,em,es)的单个错误中生成且传递至少一个控制指令(sss),以便将所述机动车带到安全状态中。
2.根据权利要求1所述的装置,其特征在于,所述第一子系统(cm)和所述第二子系统(cs)如此构造,使得其分别计算至少一个轨迹。
3.根据权利要求2所述的装置,其特征在于,所述第一子系统(cm)和所述第二子系统(cs)如此构造,使得其分别计算针对至少一个执行器的控制指令。
4.根据前述权利要求中任一项所述的装置,其特征在于,所述第二子系统(cs)和/或第四子系统(es)对错误静默地构造。
5.根据前述权利要求中任一项所述的装置,其特征在于,所述装置(1)如此构造,使得在双重错误中,其中至少不涉及所述第三子系统(em)或所述第四子系统(es),由所述第三子系统(em)或所述第四子系统(es)生成针对紧急停车的控制指令(ess)。
6.根据前述权利要求中任一项所述的装置,其特征在于,所述装置(1)如此构造,使得在无错误运行中针对所述执行装置的控制指令(sb)通过所述第二子系统(cs)和所述第四子系统(es)计算和输出。
7.根据前述权利要求中任一项所述的装置,其特征在于,附加地所述第一子系统(cm)与所述第四子系统(es)经由一数据连接(cems)而连接且/或附加地所述第二子系统(cs)与所述第三子系统(em)经由一数据连接(cesm)而连接。
8.根据前述权利要求中任一项所述的装置,其特征在于,所述第三子系统(em)和所述第四子系统(es)由分别至少两个单独的次级系统(em1-em4,es1-es4)组成。
9.一种用于生成和传递用于自动驾驶机动车的控制指令的方法,其中借助于至少一个第一子系统(cm)、第二子系统(cs)、第三子系统(em)和第四子系统(es),接收至少环境数据和车辆状态数据,由此计算至少一个轨迹,计算用于至少一个执行器的对于实现所述轨迹所需的控制指令并将其传递到至少一个执行器处,其中子系统(cm,cs,es,em)经由环形结构连接,所述第一子系统(cm)和所述第三子系统(em)对错误静默并且作为主控者工作且所述第二子系统(cs)和所述第四子系统(es)作为从属者工作,其中所述第一子系统(cm)和所述第二子系统(cs)分别接收至少环境数据和车辆状态数据且所述第三子系统(em)和所述第四子系统(es)将至少所述控制指令传递到所述至少一个执行器处,其中在子系统(cm,cs,em,es)的单个错误中生成至少一个控制指令(sss),以便将所述机动车带到安全状态中。
技术总结
本发明涉及一种用于生成和传递用于自动驾驶机动车的控制指令的装置,其接收至少环境数据和车辆状态数据,由此计算轨迹,计算对于实现轨迹所需的控制指令并将其传递到至少一个执行器处,其中装置包括至少一个第一子系统、第二子系统、第三子系统和第四子系统,其中第一子系统和第三子系统作为主控者工作且第二子系统和第四子系统作为从属者工作,其中第一子系统和第二子系统经由至少一个数据连接而连接且第三子系统和第四子系统经由另一数据连接而连接,其中附加地第一子系统和第三子系统经由至少一个数据连接而连接并且第二子系统和第四子系统经由一数据连接而连接,其中第一子系统和第二子系统分别接收至少环境数据和车辆状态数据且第三子系统和第四子系统将至少控制指令传递到至少一个执行装置处,其中至少第一子系统和第三子系统对错误静默地构造,其中在子系统的单个错误中生成且传递至少一个控制指令,以便将机动车带到安全状态中,以及涉及一种方法。
技术研发人员:E·施耐德,H·沃格,T·多贝富尔
受保护的技术使用者:大众汽车股份公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!