移动控制系统、移动控制方法、移动控制设备和信息处理设备与流程
本公开涉及移动控制系统、移动控制方法、移动控制设备和信息处理设备。更特别地,本公开涉及用于移动设备的自动驾驶或高级驾驶辅助系统(adas)的移动控制技术。
背景技术:
1、作为与诸如汽车之类的移动设备相关的技术,已知通过处理器等生成移动设备的路线并控制移动设备跟随该路线行驶来进行移动设备的自主行驶的技术。
2、关于此类自动驾驶技术,已知基于使用从数据库获取的地图信息和从搭载在车辆上的传感器获取的信息确定的行驶路线来控制加速器、制动器、转向器等的技术(例如,专利文献1)。
3、引文列表
4、专利文献
5、专利文献1:wo 2016/194134a
技术实现思路
1、技术问题
2、按照现有技术,可以高精度地进行移动设备的移动控制,比如路线生成和路线跟随控制。这里,从安全性的角度来看,除了使得能够高精度地进行移动控制之外,还需要进行高响应性的移动控制。然而,在高精度地进行这种移动控制的情况下,处理负荷通常增加,并且响应性恶化。另一方面,如果将处理负荷抑制得较低并强调响应性,则移动控制的精度降低,结果,安全性受损。这样,现有技术在兼顾为了进行高安全性的移动控制所要求的移动控制的高精度和高响应性方面存在问题。
3、于是,在本公开中,提出一种实现高精度和高响应性的移动控制的移动控制系统、移动控制方法、移动控制设备和信息处理设备。
4、问题的解决方案
5、为了解决上述问题,按照本公开的实施例的移动控制系统包括配置为彼此通信的第一处理单元和第二处理单元,其中所述第一处理单元基于对处理所需的响应时间没有的约束的非实时处理,使用从所述第二处理单元获取的传感器信息来生成用于控制移动设备的移动路线的路线信息,并且所述第二处理单元基于对处理所需的响应时间有约束的实时处理,沿着由所述第一处理单元生成的所述路线信息控制所述移动设备的移动。
技术特征:
1.一种移动控制系统,包括:
2.按照权利要求1所述的移动控制系统,其中
3.按照权利要求2所述的移动控制系统,其中
4.按照权利要求3所述的移动控制系统,其中
5.按照权利要求3所述的移动控制系统,其中
6.按照权利要求5所述的移动控制系统,其中
7.按照权利要求6所述的移动控制系统,其中
8.按照权利要求5所述的移动控制系统,其中
9.按照权利要求8所述的移动控制系统,其中
10.按照权利要求9所述的移动控制系统,其中
11.按照权利要求10所述的移动控制系统,其中
12.按照权利要求1所述的移动控制系统,其中
13.一种由彼此通信的第一处理单元和第二处理单元进行的移动控制方法,所述方法包括:
14.一种移动控制设备,包括:
15.一种信息处理设备,包括:
技术总结
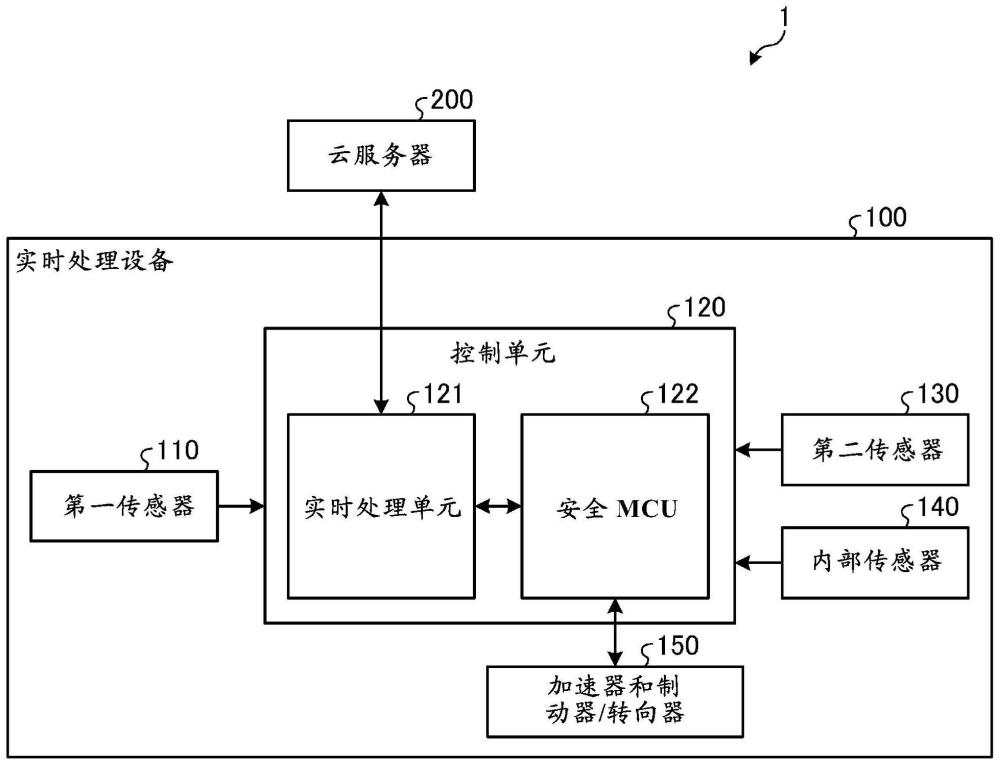
按照本公开的移动控制系统(1)包括彼此通信的第一处理单元(121)和第二处理单元(220),其中第一处理单元基于对处理所需的响应时间没有约束的非实时处理,使用从第二处理单元获取的传感器信息来生成用于控制移动设备的移动路线的路线信息,并且第二处理单元基于对处理所需的响应时间有约束的实时处理,沿着由第一处理单元生成的路线信息控制移动设备的移动。
技术研发人员:江副陆也
受保护的技术使用者:索尼集团公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!