一种基于多物理场弱耦合的自适应调整时间步长的方法
本发明涉及多物理场耦合,具体涉及一种基于多物理场弱耦合的自适应调整时间步长的方法。
背景技术:
1、随着计算机硬件水平的不断提高和仿真行业的不断发展,目前针对单一物理场的仿真已经不能满足计算的需要了。想要更加真实的通过仿真计算来预测出模型在真实世界的各项数据,需要考虑多个物理场相互作用,在此背景下多物理场耦合技术应运而生,其分析与仿真已经成为最具活力的研究方向之一。
2、而多物理场耦合主要分为两种,一种是直接将多个物理量的控制方程直接耦合在一起,这种方法被称为强耦合;另一种就是本专利采用的,在不同物理场的交界处,对两个物理场上的物理量进行数据交换以达到耦合的效果,这种方法被称为弱耦合。强耦合有个明显的缺陷,由于多个物理量的方程耦合在一起,求解的复杂度会提高,会较大程度的影响仿真软件的计算效率。
3、所以行业内使用率更高的是物理场弱耦合方法。考虑到效率问题,弱耦合方法的耦合方案基本都采用并行耦合方案,并且求解器的时间步长都是固定不变的。目前应用于弱耦合领域中的自适应调整求解器步长的研究还是空白。
4、目前的多物理场耦合技术,由于不同物理场的求解时间不一致,会导致两个求解器一个会先计算完成先计算完成的会开始等待另一个求解器传送数据,而另一个会继续执行求解过程。这个等待的时间,在流程中属于没有意义的被消耗的时间。
技术实现思路
1、本发明为了克服以上技术的不足,提供了一种根据预测的求解时间对参与耦合的求解器的时间步长进行自适应变换,最终实现两个求解器的同步运行的方法。
2、本发明克服其技术问题所采用的技术方案是:
3、一种基于多物理场弱耦合的自适应调整时间步长的方法,包括如下步骤:
4、(a)参与多物理场耦合计算的求解器共有个,为,为第个求解器,,各个求解器互不干涉;
5、(b)设置第个求解器的求解时间步长为,设置耦合时间步长为;
6、(c)初始化每个求解器当前时刻的时间为0且初始化已完成的耦合时间步的数量为后开始耦合;
7、(d)判断求解器当前的时间是否达到设置的最大时间,如果达到最大时间则执行步骤(q),如果未达到最大时间则执行步骤(e);
8、(e)第个求解器当前求解的总时间为,判断是否大于耦合时间步长,如果大于则第个求解器执行一个求解运算并执行步骤(f),如果小于等于耦合时间步长,则求解器执行一个求解时间步长的求解运算后返回执行步骤(d);
9、(f) 如果大于耦合时间步长,则执行步骤(g),如果小于等于耦合时间步长,则返回执行步骤(d);
10、(g)设置第个求解器的每一耦合步长的时间信息集合为;
11、(h)暂停第个求解器的求解总时间的计时,在时间信息集合中添加元素,得到,此时将耦合时间步的数量增加1,第个求解器开始等待与其它求解器之间传递数据,传递数据时进行求解器间数据的映射,数据传递完成后第个求解器的求解总时间继续计时;
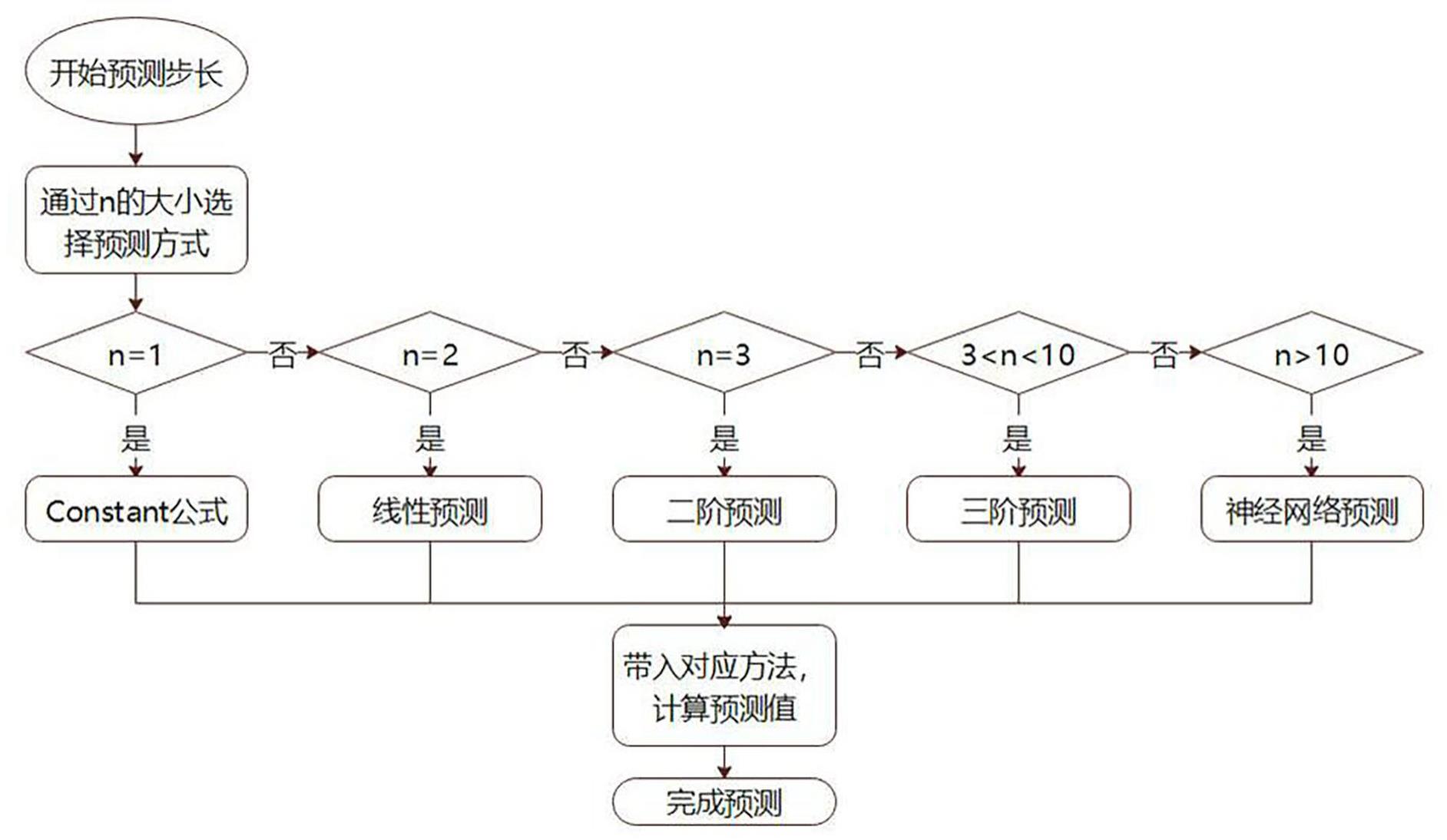
12、(i)根据耦合时间步的数量的大小得到第个求解器的下一耦合步长时间预测值,当时执行步骤(o),当时执行步骤(j);
13、(j)构建一个bp神经网络,将时间信息集合内的元素作为输出,元素的上角标的数字作为神经网络的输入,构建神经网络的样本数据;
14、(k)bp神经网络的激活函数设置为sigmoid函数,bp神经网络的误差函数采用mse函数,通过公式计算得到mse函数的误差最小值,式中为所有求解器实际计算得到的时间,为bp神经网络预测的阻力值,为时间与阻力值的方差;
15、(l)初始化bp神经网络的参数;
16、(m)在bp神经网络中迭代p次样本数据,通过迭代后的bp神经网络得到mse函数的误差最小值;
17、(n)通过公式计算得到相对误差,如果相对误差大于等于设定的收敛标准,则返回执行步骤(m),如果相对误差小于设定的收敛标准,则完成bp神经网络的训练,将耦合时间步的数量带入训练完成后的bp神经网络中得到每个求解器的下一耦合步长时间预测值;
18、(o)当得到所有求解器的下一耦合步长时间预测值后,通过公式计算得到更新的第个求解器的求解时间步长,式中,,为预测时间最长的下一耦合步长时间预测值;
19、(p)将第个求解器的求解时间步长为更新为;
20、(q)求解器继续运行,返回执行步骤(e);
21、(r)求解器求解达到预先设定的最大时间,多物理场仿真过程结束,完成多物理场仿真计算。
22、进一步的,步骤(h)中当时,,当时,。
23、优选的,步骤(h)中通过径向基函数映射或最近邻映射或面积加权法进行求解器间数据的映射。
24、进一步的,步骤(i)包括如下步骤:
25、(i-1)当时,,执行步骤(o);
26、(i-2)当时,,执行步骤(o);
27、(i-3)当时,,执行步骤(o);
28、(i-4)当时,,执行步骤(o);
29、(i-5)当时,执行步骤(j)。
30、优选的,步骤(j)中bp神经网络的输入层神经元个数设置为3个,bp神经网络的隐藏层设置为3层。
31、进一步的,步骤(l)中将bp神经网络的学习率设置为,学习率为[0-1]的随机数,将bp神经网络的权值矩阵和偏置矩阵设置为[0,1]间的随机矩阵,为bp神经网络第个隐藏层上的第个神经元上的偏置值,为bp神经网络第个隐藏层上的第个神经元上的权值,完成初始化参数操作。
32、进一步的,步骤(m)中初始时,通过公式计算得到偏置矩阵迭代次的状态值,通过公式计算得到权值矩阵迭代次的状态值,式中为偏置矩阵第次的状态值,为的一阶导数,为权值矩阵第次的状态值,为的一阶导数,每次迭代完成后,增加1,直至迭代p次。
33、优选的,p的取值为10。
34、优选的,步骤(n)中收敛标准。
35、本发明的有益效果是:本发明在整个耦合流程中增加了对求解器下一时间步的求解时间进行了预测,预测过程随着求解器的求解过程分为多个层次,预测方法从线性预测方法随着求解器求解时间的推进不断改变,一直到最后的bp神经网络预测方法。根据预测的求解时间对参与耦合的求解器的时间步长进行自适应变换,最终实现两个求解器的同步运行。
技术特征:
1.一种基于多物理场弱耦合的自适应调整时间步长的方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于多物理场弱耦合的自适应调整时间步长的方法,其特征在于:步骤(h)中当时,,当时,。
3.根据权利要求1所述的基于多物理场弱耦合的自适应调整时间步长的方法,其特征在于:步骤(h)中通过径向基函数映射或最近邻映射或面积加权法进行求解器间数据的映射。
4.根据权利要求1所述的基于多物理场弱耦合的自适应调整时间步长的方法,其特征在于,步骤(i)包括如下步骤:
5.根据权利要求1所述的基于多物理场弱耦合的自适应调整时间步长的方法,其特征在于:步骤(j)中bp神经网络的输入层神经元个数设置为3个,bp神经网络的隐藏层设置为3层。
6.根据权利要求1所述的基于多物理场弱耦合的自适应调整时间步长的方法,其特征在于:步骤(l)中将bp神经网络的学习率设置为,学习率为[0-1]的随机数,将bp神经网络的权值矩阵和偏置矩阵设置为[0,1]间的随机矩阵,为bp神经网络第个隐藏层上的第个神经元上的偏置值,为bp神经网络第个隐藏层上的第个神经元上的权值,完成初始化参数操作。
7.根据权利要求6所述的基于多物理场弱耦合的自适应调整时间步长的方法,其特征在于:步骤(m)中初始时,通过公式计算得到偏置矩阵迭代次的状态值,通过公式计算得到权值矩阵迭代次的状态值,式中为偏置矩阵第次的状态值,为的一阶导数,为权值矩阵第次的状态值,为的一阶导数,每次迭代完成后,增加1,直至迭代p次。
8.根据权利要求7所述的基于多物理场弱耦合的自适应调整时间步长的方法,其特征在于:p的取值为10。
9.根据权利要求1所述的基于多物理场弱耦合的自适应调整时间步长的方法,其特征在于:步骤(n)中收敛标准。
技术总结
一种基于多物理场弱耦合的自适应调整时间步长的方法,属于多物理场耦合技术领域,在整个耦合流程中增加了对求解器下一时间步的求解时间进行了预测,预测过程随着求解器的求解过程分为多个层次,预测方法从线性预测方法随着求解器求解时间的推进不断改变,一直到最后的BP神经网络预测方法。根据预测的求解时间对参与耦合的求解器的时间步长进行自适应变换,最终实现两个求解器的同步运行。
技术研发人员:唐滨,董韬,李宝君
受保护的技术使用者:青岛哈尔滨工程大学创新发展中心
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!