无人农机的全覆盖路径规划方法、装置及电子设备与流程
本发明涉及路径规划,具体涉及一种无人农机的全覆盖路径规划方法、装置及电子设备。
背景技术:
1、随着我国农业现代化的快速发展以及人工成本的不断上升,利用高新技术代替人工进行农业机械化作业成为趋势,无人化农场也逐渐出现在人们的视野中。农用无人农机是在农业作业中重要的机械化工具,传统的机械化作业方式是通过人工进行操纵无人农机进行驾驶作业。
2、随着无人驾驶技术的发展与应用,以及无人化农场的出现,具有自动驾驶的农机代替了人工驾驶,在无人驾驶作业中路径规划功能模块则显得尤为重要。无人驾驶无人农机的路径规划问题,就是要在其工作的地块农田中,规划出无人驾驶无人农机能够遍历整个工作区域且没有碰撞的一条安全行驶路径。目前的无人驾驶无人农机在工作时所采用的路径规划往往需要人工干预,比如在遇到需要转弯、掉头规避障碍物等需要人工控制无人农机完成无人农机动作时,并且现有的路径规划往往无法实现工作区域农田下的全覆盖作业。
3、因此,如何实现无人农机作业时对工作区域的全覆盖的技术问题,亟待解决。
技术实现思路
1、为解决上述背景技术中阐述的如何实现无人农机作业时对工作区域的全覆盖的技术问题。本发明提出一种无人农机的全覆盖路径规划方法、电子设备和存储介质。
2、本发明的一个目的在于提出一种无人农机的全覆盖路径规划方法。该方法通过对工作区域的起始点、工作方向、进弯点和出弯点等关键控制点进行计算,并对工作区域进行模块化的路径规划,能实现工作区域的全覆盖路径规划,鲁棒性好,控制精度高。
3、本发明的再一个目的在于提出一种电子设备。
4、本发明的再一个目的在于提出一种计算机可读的存储介质。
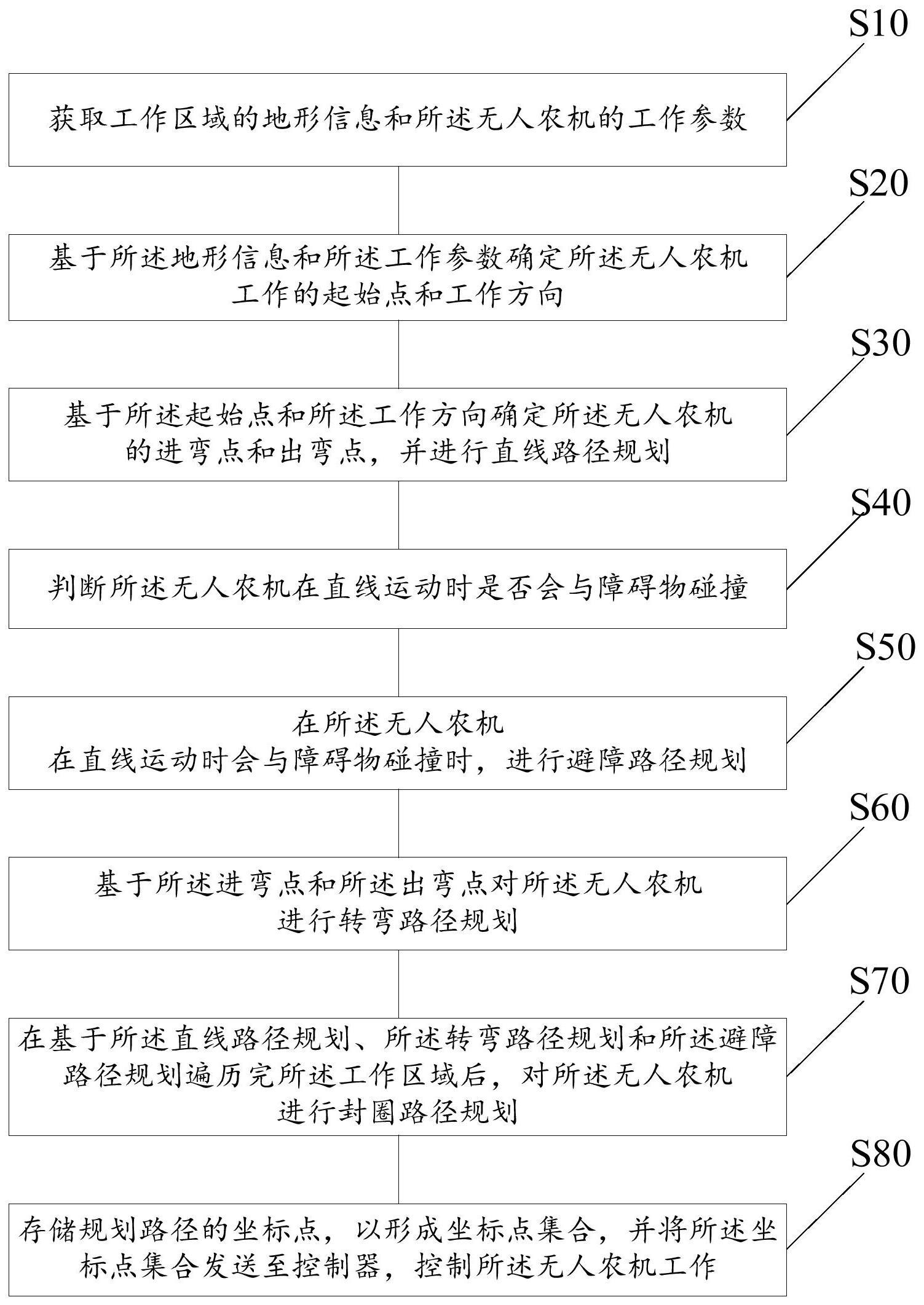
5、根据本申请实施例的一个方面,提供了一种无人农机的全覆盖路径规划方法,包括:获取工作区域的地形信息和所述无人农机的工作参数;基于所述地形信息和所述工作参数确定所述无人农机工作的起始点和工作方向;基于所述起始点和所述工作方向确定所述无人农机的进弯点和出弯点,并进行直线路径规划;判断所述无人农机在直线运动时是否会与障碍物碰撞;在所述无人农机在直线运动时会与障碍物碰撞时,进行避障路径规划;基于所述进弯点和所述出弯点对所述无人农机进行转弯路径规划;在基于所述直线路径规划、所述转弯路径规划和所述避障路径规划遍历完所述工作区域后,对所述无人农机进行封圈路径规划;存储规划路径的坐标点,以形成坐标点集合,并将所述坐标点集合发送至控制器,控制所述无人农机工作。
6、可选地,所述基于所述地形信息和所述工作参数确定所述无人农机工作的起始点和工作方向包括:基于所述地形信息和所述工作参数确定内缩安全距离和所述工作方向;基于所述内缩安全距离和所述工作方向确定所述起始点。
7、可选地,所述工作参数包括作业幅宽,所述无人农机的全覆盖路径规划方法还包括:基于所述起始点和所述工作方向确定经过所述进弯点的第一直线;基于所述第一直线和所述作业幅宽确定经过所述出弯点的第二直线;基于所述第一直线、所述第二直线、所述内缩安全距离和所述地形信息确定所述进弯点和所述出弯点。
8、可选地,所述地形信息包括所述工作区域的边界信息,所述基于所述第一直线、所述第二直线、所述内缩安全距离和所述地形信息确定所述进弯点和所述出弯点包括:获取与所述第一直线相交且靠近所述进弯点的第一边界的第一边界信息;基于所述第一边界信息和所述内缩安全距离确定第三直线;判断所述第一直线和所述第二直线是否均与所述第三直线相交;在所述第一直线和所述第二直线均与所述第三直线相交时,确定所述第一直线和所述第三直线的第一交点坐标为所述进弯点,所述第二直线和所述第三直线的第二交点坐标为出弯点。
9、可选地,所述工作参数包括无人农机最小转弯半径,在所述第一直线和所述第二直线未均与所述第三直线相交时,控制所述第一交点坐标和所述第二交点坐标向相反方向平移所述无人农机最小转弯半径。
10、可选地,控制所述无人农机转弯时以预设旋转角度步长旋转。
11、可选地,所述在所述无人农机在直线运动时会与障碍物碰撞时,进行避障路径规划包括:控制所述障碍物的边界向外膨胀预设比例的作业幅宽;基于膨胀后的所述障碍物的边界进行避障路径规划。
12、根据本申请实施例的又一个方面,还提供了一种无人农机的全覆盖路径规划装置,包括:获取模块,用于获取工作区域的地形信息和所述无人农机的工作参数;第一分析模块,基于所述地形信息和所述工作参数确定所述无人农机工作的起始点和工作方向;第二分析模块,基于所述起始点和所述工作方向确定所述无人农机的进弯点和出弯点,并进行直线路径规划;第三分析模块,用于判断所述无人农机在直线运动时是否会与障碍物碰撞;第一执行模块,用于在所述无人农机在直线运动时会与障碍物碰撞时,进行避障路径规划;第四分析模块,基于所述进弯点和所述出弯点对所述无人农机进行转弯路径规划;第二执行模块,在基于所述直线路径规划、所述转弯路径规划和所述避障路径规划遍历完所述工作区域后,对所述无人农机进行封圈路径规划;第三执行模块,存储规划路径的坐标点,以形成坐标点集合,并将所述坐标点集合发送至控制器,控制所述无人农机工作。
13、根据本申请实施例的又一个方面,还提供了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器、通信接口和存储器通过通信总线完成相互间的通信;其中,存储器,用于存储计算机程序;处理器,用于通过运行存储器上所存储的计算机程序来执行上述任一实施例中的方法步骤。
14、根据本申请实施例的又一个方面,还提供了一种计算机可读的存储介质,该存储介质中存储有计算机程序,其中,该计算机程序被设置为运行时执行上述任一实施例中的方法步骤。
15、本申请通过计算无人农机工作的起始点、工作方向、进弯点和出弯点等关键控制点,以及对工作区域进行模块化的路径规划,能实现全覆盖路径规划,鲁棒性好,控制精度高。
技术特征:
1.一种无人农机的全覆盖路径规划方法,其特征在于,包括:
2.如权利要求1所述的无人农机的全覆盖路径规划方法,其特征在于,所述基于所述地形信息和所述工作参数确定所述无人农机工作的起始点和工作方向包括:
3.如权利要求2所述的无人农机的全覆盖路径规划方法,其特征在于,所述工作参数包括作业幅宽,所述无人农机的全覆盖路径规划方法还包括:
4.如权利要求3所述的无人农机的全覆盖路径规划方法,其特征在于,所述地形信息包括所述工作区域的边界信息,所述基于所述第一直线、所述第二直线、所述内缩安全距离和所述地形信息确定所述进弯点和所述出弯点包括:
5.如权利要求4所述的无人农机的全覆盖路径规划方法,其特征在于,所述工作参数包括无人农机最小转弯半径,
6.如权利要求1所述的无人农机的全覆盖路径规划方法,其特征在于,控制所述无人农机转弯时以预设旋转角度步长旋转。
7.如权利要求1所述的无人农机的全覆盖路径规划方法,其特征在于,所述在所述无人农机在直线运动时会与障碍物碰撞时,进行避障路径规划包括:
8.一种无人农机的全覆盖路径规划装置,其特征在于,包括:
9.一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,所述处理器、所述通信接口和所述存储器通过所述通信总线完成相互间的通信,其特征在于,
10.一种计算机可读的存储介质,其特征在于,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行权利要求1-7中任一项所述的无人农机的全覆盖路径规划方法。
技术总结
本发明公开一种无人农机的全覆盖路径规划方法、装置及电子设备,属于路径规划技术领域,包括:获取工作区域的地形信息和无人农机的工作参数;基于地形信息和工作参数确定无人农机工作的起始点、工作方向、进弯点和出弯点等关键控制点;在确定出关键控制点后,以起始点开始进行直线路径规划,在直线路径规划过程中存在障碍物时,进行避障路径规划,在到达转弯区域时,进行转弯路径规划,直至遍历完整个工作区域后,进行封圈路径规划,完成工作区域的全覆盖路径规划,并将规划的路径存储并发送至控制器,控制无人农机工作。本申请基于计算出的关键控制点,以及对工作区域进行模块化的路径规划,能实现全覆盖路径规划,鲁棒性好,控制精度高。
技术研发人员:孙柱,孙凯信,范玉卿,王海宁
受保护的技术使用者:潍柴动力股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!