一种基于IC智能卡的移动机器人循迹方法
本发明涉及机器人移动控制领域,尤其涉及一种基于ic智能卡的移动机器人循迹方法。
背景技术:
1、随着科学技术的飞速发展,移动机器人的开发和研究受到了研究人员的广泛关注。在移动机器人的开发过程中融合了自动控制、人工智能和传感器等多种技术,移动机器人的运动由传统控制方法逐渐过渡到智能控制方法。移动机器人开发中包括控制模块、循迹模块、驱动模块等,而移动机器人循迹模块的技术和应用方式作为移动机器人的一个重要分支,对移动机器人路径规划和路径保持的稳定性和准确性起着十分重要作用。在当今的移动机器人循迹应用方式中,常见的有:红外光电传感器循迹,ccd摄像机图像采集循迹等等。这些现有的移动机器人循迹应用技术仍存在着一些缺点。
2、红外光电传感器易受碰撞、灰尘、日光等影响。支持更有限的工作范围,因此它的执行会随着距离的增加而损坏。传统的红外光电传感器循迹方式只能通过红外光电传感器对预先设定路径上的黑色通电导线轨道行走,在路径规划多样性、选择性、灵活性方面较为单一。
3、ccd摄像机图像采集系统会受到光源影响而具备变大图像的特点,削弱错乱背景图的作用,立即影响数据信息的接收。因为没有通用性的照明灯具,光源的设计方案一直是这门技术的难题,一般需要对每一种特殊的运用方案来挑选特殊的光源种类,以达到较好的目标检测效果。ccd摄像机图像采集系统工作中的检测还容易受到自然环境影响,包括温度、阳光照射、尘土、环境湿度等,干扰到ccd摄像机图像采集系统检测和传输各种数据信息。
4、为了解决本领域普遍存在的以上问题,作出了本发明。
技术实现思路
1、本发明的目的在于,针对目前所存在的不足,提出了一种基于ic智能卡的移动机器人循迹方法。
2、为了克服现有技术的不足,本发明采用如下技术方案:
3、一种基于ic智能卡的移动机器人循迹方法,包括以下步骤:
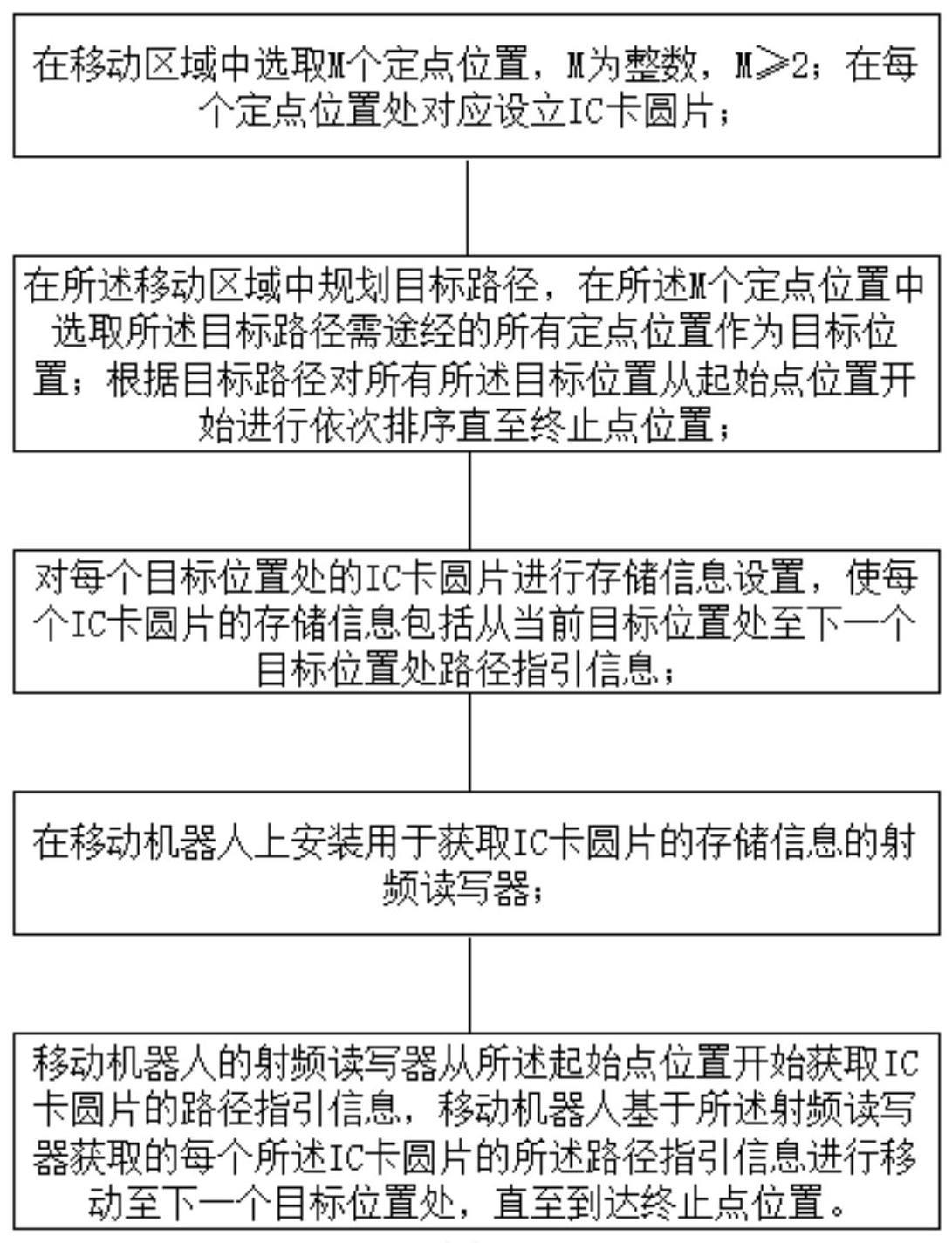
4、在移动区域中选取m个定点位置,m为整数,m≥2;在每个定点位置处对应设立ic卡圆片;
5、在所述移动区域中规划目标路径,在所述m个定点位置中选取所述目标路径需途经的所有定点位置作为目标位置,所述目标位置包括所述目标路径的起始点位置和终止点位置;根据目标路径对所有所述目标位置从起始点位置开始进行依次排序直至终止点位置;
6、对每个目标位置处的ic卡圆片进行存储信息设置,使每个ic卡圆片的存储信息包括从当前目标位置处至下一个目标位置处路径指引信息;
7、在移动机器人上安装用于获取ic卡圆片的存储信息的射频读写器;
8、移动机器人的射频读写器从所述起始点位置开始获取ic卡圆片的路径指引信息,移动机器人基于所述射频读写器获取的每个所述ic卡圆片的所述路径指引信息进行移动至下一个目标位置处,直至到达终止点位置。
9、进一步的,所述目标位置还包括目标路径中的转角处对应的拐点位置;所述拐点位置为移动机器人需改变前进方向的位置。
10、进一步的,所述路径指引信息包括当前目标位置处与下一个目标位置处之间的角度信息和距离信息;所述移动机器人根据所述角度信息控制前进方向;所述移动机器人根据所述距离信息控制移动距离。
11、进一步的,所述路径指引信息基于当前目标位置处的ic卡圆片的位置所建立的直角坐标系而确定,所述当前目标位置处的ic卡圆片的位置为当前所述直角坐标系中的已知点a,所述下一个目标位置处的ic卡圆片的位置为当前所述直角坐标系中的已知点b;所述角度信息和所述距离信息基于所述已知点a和已知点b的位置关系而确定。
12、进一步的,所述目标路径对应的所有目标位置的数量为n个,n为整数,其中n=m。
13、进一步的,所述目标路径对应的所有目标位置的数量为n个,n为整数,其中2≤n<m。
14、进一步的,每个所述ic卡圆片内设有lc串联谐振电路,所述lc串联谐振电路用于发射出与所述射频读写器相同的频率。
15、进一步的,所述移动机器人上设置有避障系统,所述避障系统用于检测移动机器人移动过程中的障碍物并生成避障路径。
16、本发明所取得的有益效果是:
17、1.通过在移动区域的定点位置上设置ic卡圆片,并根据需要选取定点位置作为目标位置,将机器人的目标路径分段,使机器按照每个ic卡圆片的路径指引信息行走,基于ic智能卡原理下的移动机器人循迹方法支持更广阔的工作范围,因此移动机器人的目标导向执行作用不会随着距离的增加而削弱。
18、2.当移动区域包括多种复杂的路径时,规划新的目标路径不需要改变移动区域的ic卡圆片的当前位置,只需根据需要选取其中的若干个连贯的定点位置作为目标位置,并改变目标位置上ic卡圆片中所存储的路径指引信息,使不同目标位置处ic卡圆片的位置信息自由组合,只要能使自由组合下所得的移动路径连接贯通,即可实现多种移动机器人路径轨迹,创造出强大的移动机器人路径网络,较大的提高了移动机器人路径循迹和规划的多样性、选择性、灵活性。
19、3.移动机器人循迹路径中固定ic卡不易受碰撞、灰尘、日光等自然环境影响,而是通过射频读写器读取ic卡中存储的目标信息,以达到较好的目标检测效果。
20、4.基于ic智能卡原理下的移动机器人循迹方式主要设备简单可靠,造价便宜,容易推广,维护方便。稳定性好,寿命长,一般可重复读写达10万次以上。通过设置拐点位置,根据拐点位置上ic卡圆片的路径指引信息,移动机器人进行旋转,因此移动机器人可根据目标路径的转角或转弯情况对应改变前进方向。
21、5.所述路径指引信息基于ic卡圆片的位置所建立的直角坐标系而确定,因此两个ic卡圆片之间的位置关系的确认简单方便,只要到达当前ic卡圆片位置处,即可准确实现到达下一个ic卡圆片的路径指引信息。
技术特征:
1.一种基于ic智能卡的移动机器人循迹方法,其特征在于:包括以下步骤:
2.如权利要求1所述的一种基于ic智能卡的移动机器人循迹方法,其特征在于:所述目标位置还包括目标路径中的转角处对应的拐点位置;所述拐点位置为移动机器人需改变前进方向的位置。
3.如前述权利要求1所述的一种基于ic智能卡的移动机器人循迹方法,其特征在于:所述路径指引信息包括当前目标位置处与下一个目标位置处之间的角度信息和距离信息;所述移动机器人根据所述角度信息控制前进方向;所述移动机器人根据所述距离信息控制移动距离。
4.如前述权利要求3所述的一种基于ic智能卡的移动机器人循迹方法,其特征在于:所述路径指引信息基于当前目标位置处的ic卡圆片的位置所建立的直角坐标系而确定,所述当前目标位置处的ic卡圆片的位置为当前所述直角坐标系中的已知点a,所述下一个目标位置处的ic卡圆片的位置为当前所述直角坐标系中的已知点b;所述角度信息和所述距离信息基于所述已知点a和已知点b的位置关系而确定。
5.如前述权利要求1所述的一种基于ic智能卡的移动机器人循迹方法,其特征在于:所述目标路径对应的所有目标位置的数量为n个,n为整数,其中n=m。
6.如前述权利要求1所述的一种基于ic智能卡的移动机器人循迹方法,其特征在于:所述目标路径对应的所有目标位置的数量为n个,n为整数,其中2≤n<m。
7.如前述权利要求1所述的一种基于ic智能卡的移动机器人循迹方法,其特征在于:每个所述ic卡圆片内设有lc串联谐振电路,所述lc串联谐振电路用于发射出与所述射频读写器相同的频率。
8.如前述权利要求1所述的一种基于ic智能卡的移动机器人循迹方法,其特征在于:所述移动机器人上设置有避障系统,所述避障系统用于检测移动机器人移动过程中的障碍物并生成避障路径。
技术总结
发明公开了一种基于IC智能卡的移动机器人循迹方法,包括以下步骤:在移动区域中选取M个定点位置;在每个定点位置处对应设立IC卡圆片;在移动区域中规划目标路径,在M个定点位置中选取目标路径需途经的所有定点位置作为目标位置,使每个IC卡圆片的存储信息包括从当前目标位置处至下一个目标位置处路径指引信息;移动机器人的射频读写器从起始点位置开始获取IC卡圆片的路径指引信息,移动机器人基于射频读写器获取的每个IC卡圆片的路径指引信息进行移动至下一个目标位置处,直至到达终止点位置。本发明的移动机器人的目标导向执行作用不会随着距离的增加而削弱,移动机器人路径循迹和规划的多样性、选择性、灵活性。
技术研发人员:陈友鹏,王志锋,李国年,刘展眉,王培洲,郑焕楠,许文燕,杜玉香,童俊,操健
受保护的技术使用者:广州南洋理工职业学院
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!