一种基于EtherCAT总线的实时精密补偿方法与流程
本发明涉及工业控制,特别是涉及一种基于ethercat总线的实时精密补偿方法。
背景技术:
1、ethercat总线运动控制器目前大多是基于pc的控制软件,应用于印刷设备、风力发电机、实验台到剧院、运动场等诸多场景,特别是在高效的工程领域中,一切都可以通过ethercat总线运动控制器实现自动化。控制器中codesys软件的模块化思想以及其灵活的软件架构融入到整个平台,具有控制结构灵活多变、高同步性和高实时性的特点。
2、转台主要用于惯性导航系统和惯性元件检定、标定以及模拟飞行器、航空发动机等姿态运动,具有高动态跟踪、高速率精度、平稳性和高定位精度特性。目前转台普遍采用直接驱动进行控制,由于编码器安装误差和机械轴系回转误差等,造成从编码器读取的位置信息和实际位置信息存在偏差,导致速率精度和平稳性变差,定位精度变差。当前codesys软件中的运动补偿一种是基于到位停止后的补偿模块,另外一种是基于到位不停止的补偿模块,运动过程中均不能进行实时补偿。因此需要进一步考虑实时补偿技术,使ethercat总线运动控制器满足转台的应用需求。
技术实现思路
1、(1)要解决的技术问题
2、本发明实施例提供了一种基于ethercat总线的实时精密补偿方法,解决ethercat总线运动控制器难以应用于较高精度要求转台的技术问题。
3、(2)技术方案
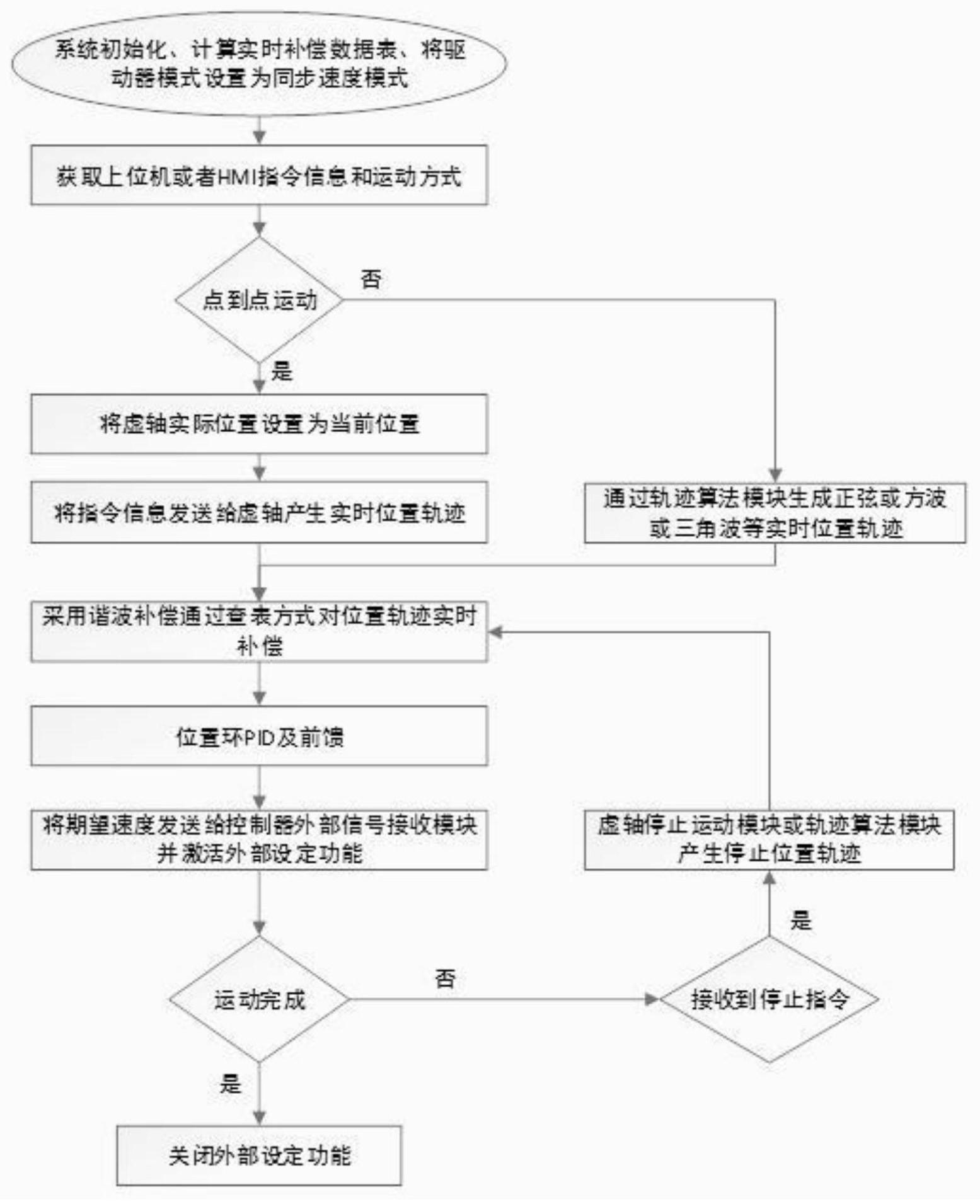
4、本发明的实施例提出了一种基于ethercat总线的实时精密补偿方法,包括步骤:s1,系统初始化;s2,将驱动器模式设置为同步速度模式;s3,获取上位机或者hmi指令信息和运动方式;s4,点到点定位运动采用虚轴产生运动轨迹;s5,采用谐波补偿通过实时补偿数据表对位置轨迹实时补偿。
5、进一步地,计算实时补偿数据表的步骤为:将控制系统中谐波系数清零;点到点位置运动,测量等间隔角度的实际角度误差;计算谐波系数;生成实时补偿数据表。
6、进一步地,计算谐波系数具体为,通过补偿算法采用8次或11次谐波补偿,计算补偿系数并下载至底层控制系统中。
7、进一步地,生成实时补偿数据表具体为,计算实时补偿数据表,生成具有360000个补偿点的数据表格,补偿间隔为0.001°。
8、进一步地,生成实时补偿数据表以掉电保存数据类型进行保存。
9、进一步地,s4具体为,将虚轴实际位置设置为驱动器关联实轴的当前位置,将指令信息发送给虚轴产生实时位置轨迹。
10、进一步地,s4还包括通过轨迹算法模块生成正弦波、三角波、方波的实时位置轨迹。
11、进一步地,在s5中,期望轨迹经过谐波补偿后,控制系统再经过位置环pid和前馈控制算法,得到伺服所需的期望速度;控制系统激活外部设定功能,伺服的速度由外部信号接收模块接管,直接发送给实轴对应的驱动器直至运动完成,如果控制系统中间接收到来自上位机或者hmi的停止指令,需要产生相应的停止轨迹,直至运动完全停止,最后关闭外部设定功能。
12、(3)有益效果
13、综上,本发明采用谐波补偿通过实时补偿数据表对位置轨迹实时补偿,并在控制器系统中引入位置环和前馈控制算法,极大的减小了系统跟踪误差,通过实时精密补偿技术减小了码盘安装或机械轴系带来的误差,速率平稳性和速率精度及静态定位精度得到极大提高,使得ethercat总线运动控制系统能够满足转台这种特种设备的使用需求。
技术特征:
1.一种基于ethercat总线的实时精密补偿方法,其特征在于,包括步骤:
2.根据权利要求1所述的一种基于ethercat总线的实时精密补偿方法,其特征在于,计算实时补偿数据表的步骤为:
3.根据权利要求2所述的一种基于ethercat总线的实时精密补偿方法,其特征在于,计算谐波系数具体为,通过补偿算法采用8次或11次谐波补偿,计算补偿系数并下载至底层控制系统中。
4.根据权利要求2所述的一种基于ethercat总线的实时精密补偿方法,其特征在于,生成实时补偿数据表具体为,计算实时补偿数据表,生成具有360000个补偿点的数据表格,补偿间隔为0.001°。
5.根据权利要求2所述的一种基于ethercat总线的实时精密补偿方法,其特征在于,生成实时补偿数据表以掉电保存数据类型进行保存。
6.根据权利要求1所述的一种基于ethercat总线的实时精密补偿方法,其特征在于,s4具体为,将虚轴实际位置设置为驱动器关联实轴的当前位置,将指令信息发送给虚轴产生实时位置轨迹。
7.根据权利要求1所述的一种基于ethercat总线的实时精密补偿方法,其特征在于,s4还包括通过轨迹算法模块生成正弦波、三角波、方波的实时位置轨迹。
8.根据权利要求1所述的一种基于ethercat总线的实时精密补偿方法,其特征在于,在s5中,期望轨迹经过谐波补偿后,控制系统再经过位置环pid和前馈控制算法,得到伺服所需的期望速度;
技术总结
本发明涉及工业控制技术领域,特别是涉及一种基于EtherCAT总线的实时精密补偿方法。包括步骤:系统初始化;将驱动器模式设置为同步速度模式;获取上位机或者HMI指令信息和运动方式;点到点定位运动采用虚轴产生运动轨迹;采用谐波补偿通过实时补偿数据表对位置轨迹实时补偿。本发明采用谐波补偿通过实时补偿数据表对位置轨迹实时补偿,并在控制器系统中引入位置环和前馈控制算法,极大的减小了系统跟踪误差,通过实时精密补偿技术减小了码盘安装或机械轴系带来的误差,速率平稳性和速率精度及静态定位精度得到极大提高,使得EtherCAT总线运动控制系统能够满足转台这种特种设备的使用需求。
技术研发人员:安康康,孟凡军,黄金鑫
受保护的技术使用者:中国航空工业集团公司北京航空精密机械研究所
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!