一种基于多混合驱动的大型双轴转台稳定控制系统及方法与流程
本发明涉及转台控制,特别是涉及一种基于多混合驱动的大型双轴转台稳定控制系统及方法。
背景技术:
1、转台是一种重要的测试设备,用于惯性导航系统和惯性元件检定、标定,以及模拟飞行器、航空发动机等姿态运动。随着航空、航天和航海工业的不断发展,直接进行实物测试的需求越来越多,导致转台向大型化发展的趋势越来越明显。传动机构存在功率低、安全系数高、造价低廉等优点,但控制稳定性和动态性差,尤其一种驱动不能满足使用需求,需要多种驱动混合控制时,其稳定性问题就更加突显出来。因此,需进一步考虑提升多混合驱动时大型设备稳定控制方法。
技术实现思路
1、(1)要解决的技术问题
2、本发明实施例提供了一种基于多混合驱动的大型双轴转台稳定控制系统及方法,解决多混合驱动下系统动态稳定性和静态精确性差的技术问题。
3、(2)技术方案
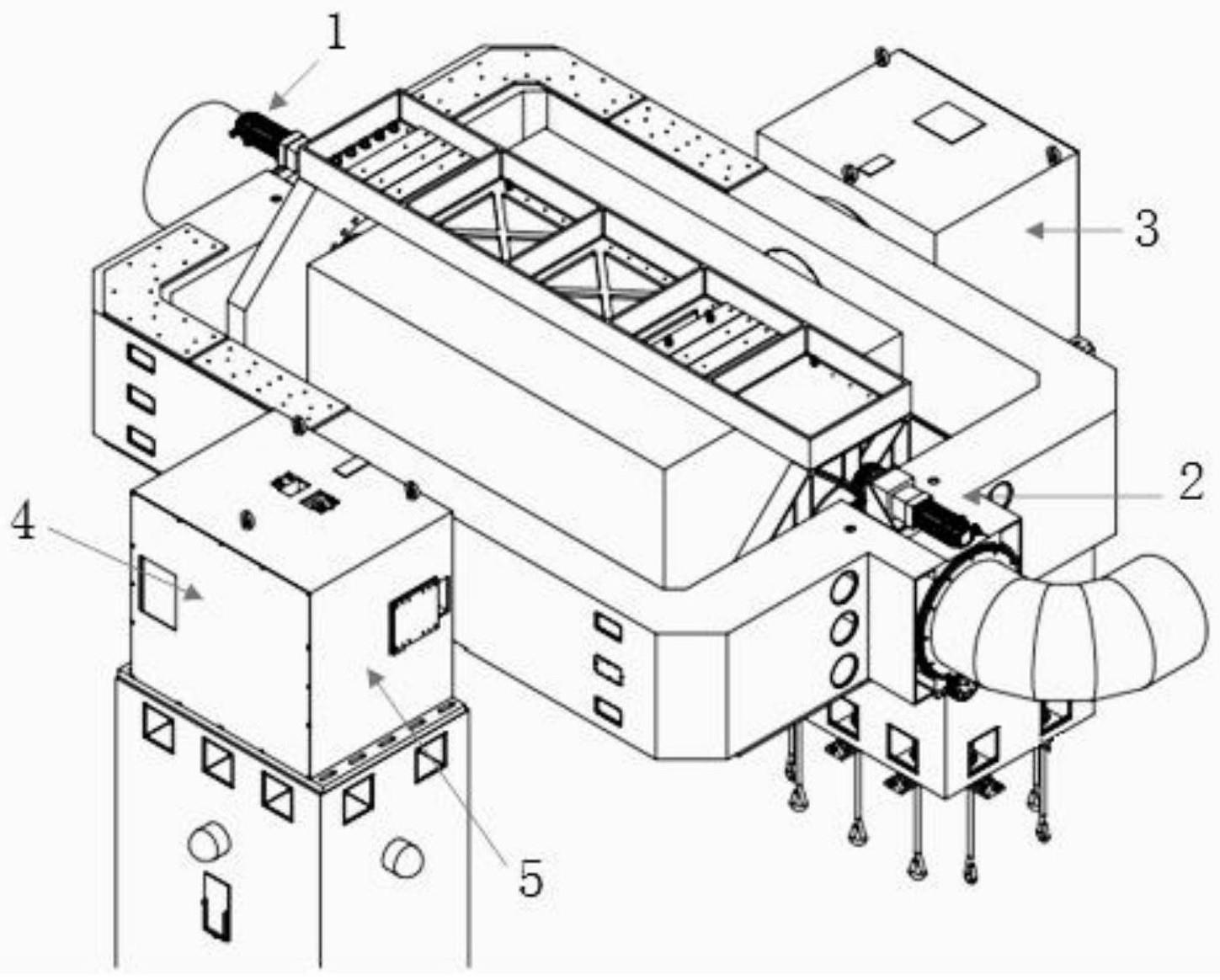
4、本发明的实施例提出了一种基于多混合驱动的大型双轴转台稳定控制系统,包括内轴和外轴,所述内轴两端分别通过齿轮组配合电机驱动;所述外轴一端通过蜗轮蜗杆配合电机作为主驱动,所述外轴另外一端通过齿轮组配合电机作为辅助驱动;所述内轴和所述外轴的电机均设置有旋转编码器,用于其自身的力矩或速率闭环控制;所述内轴和所述外轴端分别安装有绝对式编码器进行全反馈控制。
5、进一步地,还包括电控部分,所述电控部分包括dsp运动控制器、上位机和驱动器。
6、进一步地,所述内轴由第一内轴驱动器和第二内轴驱动器同步驱动,所述内轴两端分别安装大齿轮,大齿轮与小齿轮啮合,所述第一内轴驱动器和第二内轴驱动器的电机通过减速机分别带动两小齿轮运动,小齿轮带动大齿轮完成整个框架的驱动运动。
7、进一步地,所述外轴一端安装蜗轮蜗杆配合减速机和大功率电机由第一外轴驱动器驱动,所述外轴另外一端安装一个大齿轮,呈180°分布安装两个小齿轮,大齿轮和小齿轮啮合,并分别配合减速机和电机由第二外轴驱动器和第三外轴驱动器驱动。
8、第二方面,提供了用于实施一种基于多混合驱动的大型双轴转台稳定控制系统的稳定控制方法,包括步骤:
9、s1,定义第一内轴驱动器为主驱动器,通过获取第一内轴电机的旋转变压器信号实现力矩和速率闭环,同时将第一内轴电机的实际输出力矩通过模拟量输出给dsp运动控制器;
10、s2,定义第二内轴驱动器为从驱动器,通过获取第二内轴电机的旋转变压器信号实现力矩闭环;
11、s3,第二内轴驱动器的指令力矩来自dsp运动控制器,所述指令力矩为k乘以第一内轴驱动器的实际力矩;
12、s4,dsp运动控制器通过内轴绝对式编码器完成前馈控制和位置闭环控制。
13、进一步地,当k=1时,系统运行一段时间后会出现抖动现象,而且运行状态从稳定运行到抖动的时间会随着k值的减小而延长,当k=1/2时,长时间运行抖动消失。
14、第三方面,提供了用于一种基于多混合驱动的大型双轴转台稳定控制系统的稳定控制方法,包括步骤:
15、s1,定义第一外轴驱动器为主驱动器,通过获取第一外轴电机的旋转变压器信号实现力矩和速率闭环,同时将第一外轴电机的实际输出力矩通过模拟量输出给dsp运动控制器;
16、s2,定义第二外轴驱动器和第三外轴驱动器为从驱动器,通过获取第二外轴电机和第三外轴电机的旋转变压器信号实现力矩闭环;
17、s3,第二外轴驱动器和第三外轴驱动器的指令力矩来自dsp运动控制器,所述指令力矩为k1乘以期望速率加上k2乘以第一外轴驱动器的实际力矩;
18、s4,dsp运动控制器通过外轴绝对式编码器完成前馈控制和位置闭环控制。
19、进一步地,设定dsp运动控制器发送给第二外轴驱动器和第三外轴驱动器的力矩指令为k1乘以期望速率加上k2乘以第一外轴驱动器的实际力矩;k2设定为1/2,k1依据设备中转速与电机额定电流不同调试设定。
20、(3)有益效果
21、综上,由于大型双轴转台具有跨度大、惯量大的特点,一个传动机构往往不能满足其性能需求,需要增加多个驱动机构辅助驱动,针对多个驱动机构共同驱动给系统带来稳定性问题,本发明通过蜗轮蜗杆与双齿轮混合驱动稳定控制,可有效减小反向传动间隙,提高大型双轴转台的动态稳定性和静态精确性,可应用于其他混合驱动大型设备,提高多混合驱动的稳定性和实用性。
技术特征:
1.一种基于多混合驱动的大型双轴转台稳定控制系统,其特征在于,包括内轴和外轴,所述内轴两端分别通过齿轮组配合电机驱动;所述外轴一端通过蜗轮蜗杆配合电机作为主驱动,所述外轴另外一端通过齿轮组配合电机作为辅助驱动;所述内轴和所述外轴的电机均设置有旋转编码器,用于其自身的力矩或速率闭环控制;所述内轴和所述外轴端分别安装有绝对式编码器进行全反馈控制。
2.根据权利要求1所述的一种基于多混合驱动的大型双轴转台稳定控制系统,其特征在于,还包括电控部分,所述电控部分包括dsp运动控制器、上位机和驱动器。
3.根据权利要求2所述的一种基于多混合驱动的大型双轴转台稳定控制系统,其特征在于,所述内轴由第一内轴驱动器和第二内轴驱动器同步驱动,所述内轴两端分别安装大齿轮,大齿轮与小齿轮啮合,所述第一内轴驱动器和第二内轴驱动器的电机通过减速机分别带动两小齿轮运动,小齿轮带动大齿轮完成整个框架的驱动运动。
4.根据权利要求2所述的一种基于多混合驱动的大型双轴转台稳定控制系统,其特征在于,所述外轴一端安装蜗轮蜗杆配合减速机和大功率电机由第一外轴驱动器驱动,所述外轴另外一端安装一个大齿轮,呈180°分布安装两个小齿轮,大齿轮和小齿轮啮合,并分别配合减速机和电机由第二外轴驱动器和第三外轴驱动器驱动。
5.用于实施权利要求3所述的一种基于多混合驱动的大型双轴转台稳定控制系统的稳定控制方法,其特征在于,包括步骤:
6.根据权利要求5所述的一种基于多混合驱动的大型双轴转台稳定控制方法,其特征在于,当k=1时,系统运行一段时间后会出现抖动现象,而且运行状态从稳定运行到抖动的时间会随着k值的减小而延长,当k=1/2时,长时间运行抖动消失。
7.用于实施权利要求4所述的一种基于多混合驱动的大型双轴转台稳定控制系统的稳定控制方法,其特征在于,包括步骤:
8.根据权利要求7所述的一种基于多混合驱动的大型双轴转台稳定控制方法,其特征在于,设定dsp运动控制器发送给第二外轴驱动器和第三外轴驱动器的力矩指令为k1乘以期望速率加上k2乘以第一外轴驱动器的实际力矩;k2设定为1/2,k1依据设备中转速与电机额定电流不同调试设定。
技术总结
本发明涉及转台控制技术领域,特别是涉及一种基于多混合驱动的大型双轴转台稳定控制系统及方法。包括内轴和外轴,所述内轴两端分别通过齿轮组配合电机驱动;所述外轴一端通过蜗轮蜗杆配合电机作为主驱动,所述外轴另外一端通过齿轮组配合电机作为辅助驱动;所述内轴和所述外轴的电机均设置有旋转编码器,用于其自身的力矩或速率闭环控制;所述内轴和所述外轴端分别安装有绝对式编码器进行全反馈控制。本发明通过蜗轮蜗杆与双齿轮混合驱动稳定控制,可有效减小反向传动间隙,提高大型双轴转台的动态稳定性和静态精确性,可应用于其他混合驱动大型设备,提高多混合驱动的稳定性和实用性。
技术研发人员:安康康,孟凡军,黄金鑫,马爽,葛力彬
受保护的技术使用者:中国航空工业集团公司北京航空精密机械研究所
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!