一种高速列车自适应滑模控制方法、系统及电子设备
本发明涉及列车控制,特别是涉及一种高速列车自适应滑模控制方法、系统及电子设备。
背景技术:
1、高速铁路在促进中国经济建设和拉动内需等方面发挥着非常重要的作用,近年来得到广泛的重视和蓬勃的发展。随着高速列车运行速度的不断提高,列车安全可靠的运行及其相关技术研究也成为热点。为了保障高速铁路的可持续发展和高速列车的安全运行,需要建立有效的高速列车运行过程模型和优化控制方法,实现对给定运行曲线的高精度跟踪,这对于更新发展列车自动驾驶相关技术同样具有重要的现实意义和使用价值。
2、列车实现自动驾驶的核心是建立准确的高速列车模型并设计有效的跟踪控制方法。而建立适合于列车动态特性的模型又是对列车进行控制设计的前提和关键。在当前研究中,高速列车运行过程的动力学特性中存在非线性、参数不确定且时变等问题,使得难以建立精确的高速列车数学模型。而众多研究者在不影响高速列车性能研究的基础上,对高速列车建模方法展开了深入研究,并取得了一系列成果:如:机理建模、数据驱动建模、anfis模型等不同建模方法。在建立合适的列车运行模型基础上设计有效的控制算法可以使列车实现速度位移高精度跟踪。以上常规的高速列车动力学建模过程,大都是基于理论分析,许多假设的参数是先验已知的,然而对于操作环境复杂多变的高速列车运行过程,这些参数具有时变、不可测等特点,难以精确获得。
3、而针对高速列车的控制方面,目前较为常规的控制方法研究有:经典的pid控制、预测控制、神经网络控制、模糊控制等算法,但都存在部分缺陷,其中pid控制效果单一,具有参数整定困难的问题;预测控制对模型要求低且实时性高,但系统稳定性不强,不适于高速列车稳定运行;同样稳定性较差的还有神经网络控制、且其还具有学习速度较慢的缺点;而模糊控制虽然能实现列车精确跟踪,但比较依赖于复杂模型的建立和实际经验。
技术实现思路
1、为解决现有技术存在的上述问题,本发明提供了一种高速列车自适应滑模控制方法、系统及电子设备。
2、为实现上述目的,本发明提供了如下方案:
3、一种高速列车自适应滑模控制方法,包括:
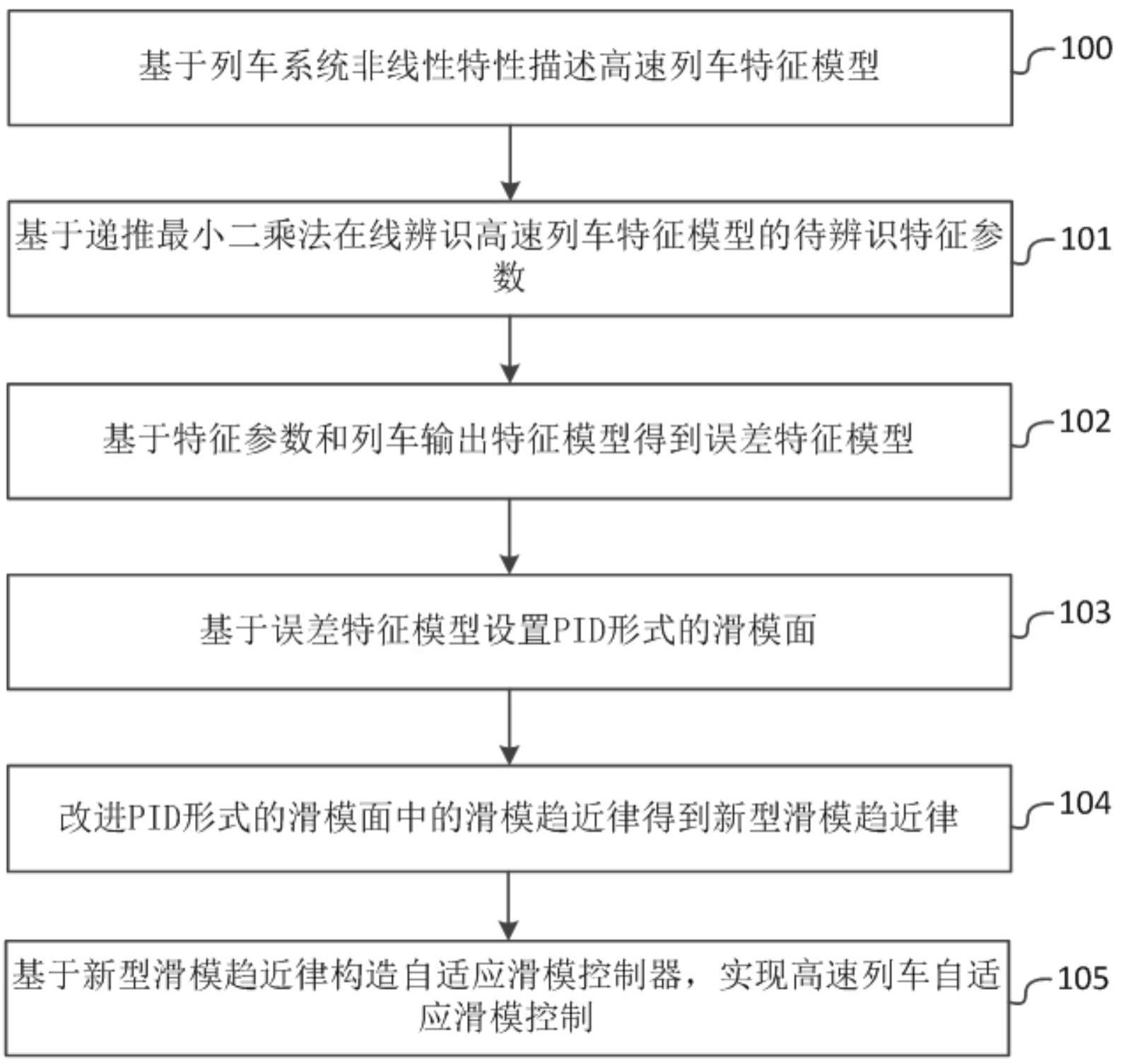
4、基于列车系统非线性特性描述高速列车特征模型;
5、采用递推最小二乘法在线辨识高速列车特征模型的特征参数;
6、基于所述特征参数和列车输出特征模型得到误差特征模型;
7、基于所述误差特征模型设置pid形式的滑模面;
8、改进所述pid形式的滑模面中的滑模趋近律得到新型滑模趋近律;
9、基于所述新型滑模趋近律构造自适应滑模控制器,实现高速列车自适应滑模控制。
10、优选地,所述高速列车特征模型为:
11、v(k+1)=f1(k)v(k)+f2(k)v(k-1)+g0(k)u(k);
12、式中,v(k)为高速列车在k时刻的运行速度,v(k+1)为高速列车在k+1时刻的运行速度,v(k-1)为高速列车在k-1时刻的运行速度,u(k)为高速列车在k时刻的牵引力或制动力输入,f1(k)、f2(k)和g0(k)均为k时刻高速列车特征模型的待辨识特征参数。
13、优选地,所述误差特征模型为:
14、e(k+1)=f1(k)e(k)+f2(k)e(k-1)-g0(k)u(k)+η(k);
15、式中,e(k)为在k时刻高速列车的速度跟踪误差,e(k+1)为k+1时刻的速度跟踪误差,e(k-1)为k-1时刻的速度跟踪误差,η(k)=vd(k+1)-f1(k)vd(k)-f2(k)vd(k-1),η(k)为简化误差模型的中间参量,vd(k)为k时刻高速列车的给定速度,vd(k-1)为k-1时刻高速列车的给定速度,vd(k+1)为k+1时刻高速列车的给定速度。
16、优选地,所述pid形式的滑模面为:
17、;
18、式中,s(k)为k时刻离散的滑模面,kp为pid控制的比例系数,ki为pid控制的积分系数,kd为pid控制的微分常系数,为前k-1时刻的速度误差总和。
19、优选地,所述改进所述pid形式的滑模面中的滑模趋近律得到新型滑模趋近律,具体包括:
20、针对离散滑模控制选择指数趋近律,得到所述pid形式的滑模面的离散形式为:
21、;
22、采用自抗扰控制中的幂次函数替换所述离散形式中滑模趋近律的符号函数得到新型滑模趋近律;所述新型滑模趋近律为:
23、;
24、式中,s(k)为k时刻离散的滑模面,q为指数趋近项参数,t为采样时间,为系统运动点趋近切换面速率的常数,sgn(*)为符号函数,为新型滑模趋近律,fal(*)为幂次函数,为决定系统跟踪性能的非线性参数,为决定幂次函数非线性区间宽度的非线性参数,s(k-1)为k-1时刻离散的滑模面。
25、根据本发明提供的具体实施例,本发明公开了以下技术效果:
26、本发明提供的高速列车自适应滑模控制方法,考虑高速列车系统模型具有非线性和参数时变等特征,由列车非线性模型推导建立其特征模型;采用递推最小二乘法在线辨识该特征模型的时变参数描述,之后在特征模型的基础上,充分运用特征建模能够降低模型复杂度且满足控制性能要求的能力,设计基于特征模型的自适应滑模控制器,同时降低抖振对系统的影响,完成其对给定运行曲线的渐近跟踪,以实现高速列车对给定运行曲线的高精度跟踪控制。
27、对应于上述提供的高速列车自适应滑模控制方法,本发明还提供了以下实施结构:
28、其中一种是高速列车自适应滑模控制系统,该系统包括:
29、特征模型构建模块,用于基于列车系统非线性特性描述高速列车特征模型;
30、特征参数辨识模块,用于采用递推最小二乘法在线辨识高速列车特征模型的特征参数;
31、误差特征模型构建模块,用于基于所述特征参数和列车输出特征模型得到误差特征模型;
32、滑模面设置模块,用于基于所述误差特征模型设置pid形式的滑模面;
33、趋近律改进模块,用于改进所述pid形式的滑模面中的滑模趋近律得到新型滑模趋近律;
34、控制器构建模块,用于基于所述新型滑模趋近律构造自适应滑模控制器,实现高速列车自适应滑模控制。
35、另一种是电子设备,该电子设备包括:
36、存储器,用于存储逻辑控制指令;
37、处理器,与所述存储器连接,用于调取并实施所述逻辑控制指令,以执行上述提供的高速列车自适应滑模控制方法。
38、优选地,所述存储器为计算机可读存储介质。
39、因本发明提供的上述系统和电子设备实现的技术效果与本发明提供的高速列车自适应滑模控制方法实现的技术效果相同,故在此不再进行赘述。
技术特征:
1.一种高速列车自适应滑模控制方法,其特征在于,包括:
2.根据权利要求1所述的高速列车自适应滑模控制方法,其特征在于,所述高速列车特征模型为:
3.根据权利要求2所述的高速列车自适应滑模控制方法,其特征在于,所述误差特征模型为:
4.根据权利要求3所述的高速列车自适应滑模控制方法,其特征在于,所述pid形式的滑模面为:
5.根据权利要求4所述的高速列车自适应滑模控制方法,其特征在于,所述改进所述pid形式的滑模面中的滑模趋近律得到新型滑模趋近律,具体包括:
6.一种高速列车自适应滑模控制系统,其特征在于,包括:
7.一种电子设备,其特征在于,包括:
8.根据权利要求7所述的电子设备,其特征在于,所述存储器为计算机可读存储介质。
技术总结
本发明涉及一种高速列车自适应滑模控制方法、系统及电子设备,属于列车控制技术领域。本发明提供的高速列车自适应滑模控制方法,考虑高速列车系统模型具有非线性和参数时变等特征,建立列车非线性模型,根据非线性模型推导建立其误差特征模型;采用递推最小二乘法在线辨识该特征模型的时变参数描述;之后在此特征模型的基础上,充分运用特征建模能够降低模型复杂度且满足控制性能要求的能力,设置PID滑模面、改进滑模趋近律,设计基于特征模型的自适应滑模控制器,同时降低抖振对系统的影响,完成其对给定运行曲线的渐近跟踪,以实现高速列车对给定运行曲线的高精度跟踪控制。
技术研发人员:谭畅,张耒耒,杨辉,李中奇,付雅婷,章俊辉,刘胤均
受保护的技术使用者:华东交通大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!