一种运输巷道超智能远程可视化仿真模拟系统及方法
本发明涉及矿山运输,尤其是一种运输巷道超智能远程可视化仿真模拟系统及方法。
背景技术:
1、运输巷道内的现场工作状态包括矿车拉卸煤、皮带运输煤、工作面排矸、物料运输等,随着机械化和自动化水平的提高,煤矿管理人员、井下工作人员对数据监视与自动控制系统的智能化需求越来越高;需要通过智能化提升煤矿企业的安全生产管理水平,达到减人增效、安全生产、连续生产、节能降耗的效果。虚拟现实技术将传统运输与智能化系统相结合,进而能够更好更快地实现智能运输建设的信息化、智能化、自动化、透明化、系统化的运作模式。智能运输在实施的过程中强调的是运输过程数据智慧化、网络协同化和决策智慧化。在功能上要实现五个“正确”,即正确的煤矿、正确的数量、正确的地点、正确的质量、正确的时间,在技术上要实现:煤矿识别、地点跟踪、煤矿溯源、实时监控、实时响应,为此需要对运输巷道的智能化生产系统及方法做进一步的改进。
技术实现思路
1、为了实现运输巷道工作流程地面远程控制,改善矿山工作环境,保证运输巷道施工安全,提高煤矿运输巷道的效率、便捷性和智能化水平,本发明提供了一种运输巷道超智能远程可视化仿真模拟系统及方法,具体的技术方案如下。
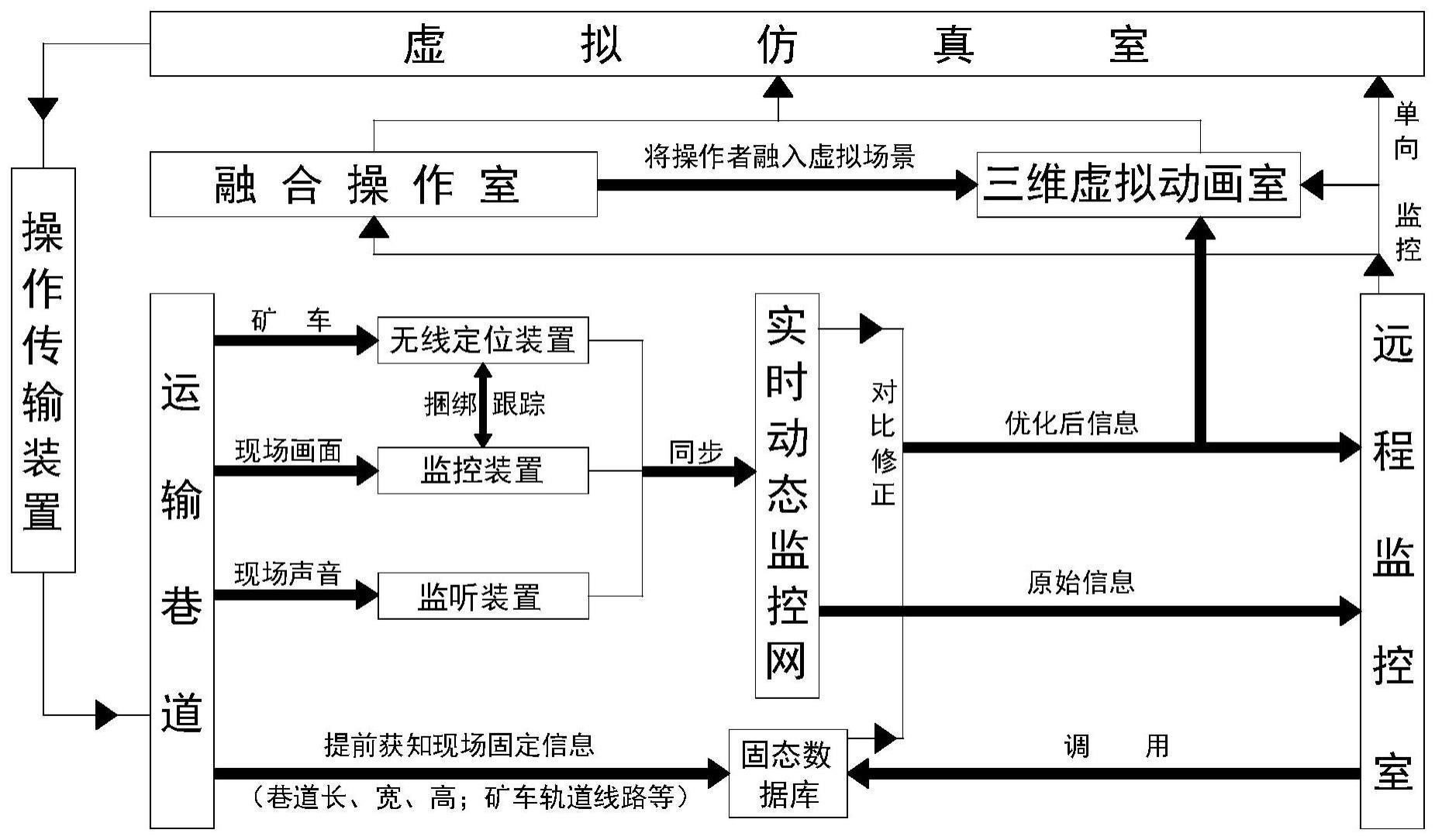
2、一种运输巷道超智能远程可视化仿真模拟系统,包括实时动态监控网、固态数据库、地面远程监控室、虚拟仿真室、操作传输装置,实时动态监控网和固态数据库均与地面远程监控室相连接,所述实时动态监控网包括无线定位装置、监控装置、监听装置,实时动态监控网获取运输巷道的工作动态信息;所述固态数据库存储并调用巷道的基础数据信息,所述地面远程监控室监控巷道作业,所述虚拟仿真室包括三维虚拟动画室和融合操作室,虚拟仿真室将巷道作业现场的实时场景画面虚拟化并以三维动画的形式呈现,并通过操作传输装置向巷道内的设备发送操作指令。
3、优选的是,运输巷道的工作动态信息包括运输大巷矿车拉卸煤、辅助运输巷物料的装运和工作面矸石的排出。
4、优选的是,无线定位装置利用uwb无线定位,无线定位装置安装在矿车上,追踪定位矿车的移动位置并更新矿车的位置信息;所述监听装置设置在巷帮上并间隔布置多个。
5、优选的是,监控装置利用三维激光扫描设备对巷道进行监控,监控装置安装在滑行轨道上,监控装置内还设置有无线定位装置,所述监控装置与矿车联动控制。
6、优选的是,巷道的基础数据信息包括巷道的长宽高度、巷道断面面积、矿车的大小和轨距、矿车轨道的线路铺设数据;所述固态数据库在实时动态监控网获取信息受到干扰时调用存储的信息,或者在实时动态监控网设备故障时调用存储的信息;所述固态数据库内存储的信息随着巷道施工更新。
7、优选的是,地面远程监控室接收并处理实时动态监控网获取的运输巷道工作动态信息,并根据工作动态信息判断巷道的作业状态,并对运输巷道内设备发送操控指令;在实时动态监控网获取信息受到干扰时或者实时动态监控网设备故障时,地面远程监控室调取固态数据库中存储的信息并修复补全运输巷道工作动态信息。
8、还优选的是,地面远程监控室的主屏幕两侧设置报警器,报警器根据工作动态信息判断巷道的作业状态结果发出警报。
9、还优选的是,虚拟仿真室将运输巷道工作动态信息处理为三维动画,所述融合操作室进行巷道现场巡检和矿车拉卸煤检查;融合操作室内配置有vr眼镜、红外摄像机、触感手套、体感衣和跑步机;所述运输巷道内设置有巷道巡检机器人,巡检机器人包括行走履带、信息采集器、机械臂、机械手、操作台和力转化器。
10、一种运输巷道超智能远程可视化仿真模拟方法,利用上述的一种运输巷道超智能远程可视化仿真模拟系统,实时动态监控网获取运输巷道的工作动态信息反馈至地面远程监控室,操作人员在地面远程监控室根据现场作业情况对巷道内的设备进行远程操控,同时工作动态信息与固态数据库内存储的信息进行对比修正,修正后的信息传输至三维虚拟动画室并构建巷道内的虚拟动画场景,操作人员在融合操作室内通过虚拟动画场景中的动作指令控制巷道巡检机器人在运输巷道内同步作业,同时地面远程监控室对运输巷道和虚拟仿真室的工作情况进行监控。
11、进一步优选的是,操作人员在三维虚拟动画中的动作被红外摄像机通过捕捉触感手套上的传感器捕捉,并传送至三维虚拟仿真室并在三维虚拟动画中完成动作模拟,触感手套的力转化器将力放大后信号传输至巡检机器人,巡检机器人通过力转化器控制操作施工。
12、本发明提供的一种运输巷道超智能远程可视化仿真模拟系统及方法的有益效果是:该系统中实时动态监控网能够保证获取信息的快速性、准确性,固态数据库方便的调用巷道数据并随着巷道的维护而保持定期更新,地面远程监控室可以完成对巷道的监控并操控巷道工作,虚拟仿真室将巷道场景虚拟化并将操作人员工作融入巷道作业环境,操作传输装置利用无线传输技术保证通讯;该系统整体上相互配合实现了运输巷道的无人化生产;利用该系统完成操作的方法具有安全、高效、便捷和智能化等多个优点。
技术特征:
1.一种运输巷道超智能远程可视化仿真模拟系统,其特征在于,包括实时动态监控网、固态数据库、地面远程监控室、虚拟仿真室、操作传输装置,实时动态监控网和固态数据库均与地面远程监控室相连接,所述实时动态监控网包括无线定位装置、监控装置、监听装置,实时动态监控网获取运输巷道的工作动态信息;所述固态数据库存储并调用巷道的基础数据信息,所述地面远程监控室监控巷道作业,所述虚拟仿真室包括三维虚拟动画室和融合操作室,虚拟仿真室将巷道作业现场的实时场景画面虚拟化并以三维动画的形式呈现,并通过操作传输装置向巷道内的设备发送操作指令。
2.根据权利要求1所述的一种运输巷道超智能远程可视化仿真模拟系统,其特征在于,所述运输巷道的工作动态信息包括运输大巷矿车拉卸煤、辅助运输巷物料的装运和工作面矸石的排出。
3.根据权利要求1或2所述的一种运输巷道超智能远程可视化仿真模拟系统,其特征在于,所述无线定位装置利用uwb无线定位,无线定位装置安装在矿车上,追踪定位矿车的移动位置并更新矿车的位置信息;所述监听装置设置在巷帮上并间隔布置多个。
4.根据权利要求1或2所述的一种运输巷道超智能远程可视化仿真模拟系统,其特征在于,所述监控装置利用三维激光扫描设备对巷道进行监控,监控装置安装在滑行轨道上,监控装置内还设置有无线定位装置,所述监控装置与矿车联动控制。
5.根据权利要求1所述的一种运输巷道超智能远程可视化仿真模拟系统,其特征在于,所述巷道的基础数据信息包括巷道的长宽高度、巷道断面面积、矿车的大小和轨距、矿车轨道的线路铺设数据;所述固态数据库在实时动态监控网获取信息受到干扰时调用存储的信息,或者在实时动态监控网设备故障时调用存储的信息;所述固态数据库内存储的信息随着巷道施工更新。
6.根据权利要求1或2所述的一种运输巷道超智能远程可视化仿真模拟系统,其特征在于,所述地面远程监控室接收并处理实时动态监控网获取的运输巷道工作动态信息,并根据工作动态信息判断巷道的作业状态,并对运输巷道内设备发送操控指令;在实时动态监控网获取信息受到干扰时或者实时动态监控网设备故障时,地面远程监控室调取固态数据库中存储的信息并修复补全运输巷道工作动态信息。
7.根据权利要求6所述的一种运输巷道超智能远程可视化仿真模拟系统,其特征在于,所述地面远程监控室的主屏幕两侧设置报警器,报警器根据工作动态信息判断巷道的作业状态结果发出警报。
8.根据权利要求1所述的一种运输巷道超智能远程可视化仿真模拟系统,其特征在于,所述虚拟仿真室将运输巷道工作动态信息处理为三维动画,所述融合操作室进行巷道现场巡检和矿车拉卸煤检查;融合操作室内配置有vr眼镜、红外摄像机、触感手套、体感衣和跑步机;所述运输巷道内设置有巷道巡检机器人,巡检机器人包括行走履带、信息采集器、机械臂、机械手、操作台和力转化器。
9.一种运输巷道超智能远程可视化仿真模拟方法,利用权利要求1至8任一项所述的一种运输巷道超智能远程可视化仿真模拟系统,其特征在于,实时动态监控网获取运输巷道的工作动态信息反馈至地面远程监控室,操作人员在地面远程监控室根据现场作业情况对巷道内的设备进行远程操控,同时工作动态信息与固态数据库内存储的信息进行对比修正,修正后的信息传输至三维虚拟动画室并构建巷道内的虚拟动画场景,操作人员在融合操作室内通过虚拟动画场景中的动作指令控制巷道巡检机器人在运输巷道内同步作业,同时地面远程监控室对运输巷道和虚拟仿真室的工作情况进行监控。
10.根据权利要求9所述的一种运输巷道超智能远程可视化仿真模拟方法,其特征在于,所述操作人员在三维虚拟动画中的动作被红外摄像机通过捕捉触感手套上的传感器捕捉,并传送至三维虚拟仿真室并在三维虚拟动画中完成动作模拟,触感手套的力转化器将力放大后信号传输至巡检机器人,巡检机器人通过力转化器控制操作施工。
技术总结
本发明提供了一种运输巷道超智能远程可视化仿真模拟系统及方法,涉及矿山运输技术领域。该系统包括实时动态监控网、固态数据库、地面远程监控室、虚拟仿真室、操作传输装置,实时动态监控网包括无线定位装置、监控装置、监听装置,用于获取运输巷道内的工作动态信息,固态数据库存储并调用巷道的基础数据信息,地面远程监控室监控巷道作业,虚拟仿真室包括三维虚拟动画室和融合操作室,将巷道作业现场的实时场景画面虚拟化并以三维动画的形式呈现,完成巷道巡检,操作传输装置将操作信息以及三维虚拟动画室中的信息传送到巷道中的巡检机器人。利用该系统可以方便的掌控巷道现场生产状态,同步井下与地上作业,安全高效作业。
技术研发人员:李青海,马小勇,张宸硕,殷鹏涛,张巨峰,史卫平,孙晓刚,纪永虎,白光超,王瑜
受保护的技术使用者:山东科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!