一种自抗扰控制系统、方法及介质
本发明涉及自动控制,尤其涉及一种自抗扰控制系统、方法及介质。
背景技术:
1、自抗扰控制器(active disturbance rejection control,adrc)具有将外扰和内部模型不确定性作为总扰动,并进行实时估计和补偿的能力,因此在磨煤机出口风温系统、炉膛负荷系统等得到成功应用。热工过程中如过热汽温系统、主蒸汽压力系统等可以表示为典型的由一阶惯性环节串联成的高阶系统。
2、相关技术中一种进行高阶补偿的改进自抗扰控制方法被提出并成功应用,推动了adrc在工业过程控制中的应用。该改进自抗扰控制方法虽然减弱了在控制高阶系统时扩张状态观测器(extend state observer,eso)的输入量的不同步性,减轻了eso的估计负担,但并没有改变高阶系统的相位滞后和大惯性特性,高阶系统对于设定值跟踪和扰动响应依然很慢。
技术实现思路
1、本发明提供了一种自抗扰控制系统、方法及介质,可以实现提升高阶系统的跟踪性能和抗扰性能,为进一步推广自抗扰控制器在工业生产过程中的现场应用提供良好的支持。
2、根据本发明的一方面,提供了一种自抗扰控制系统,该系统包括:
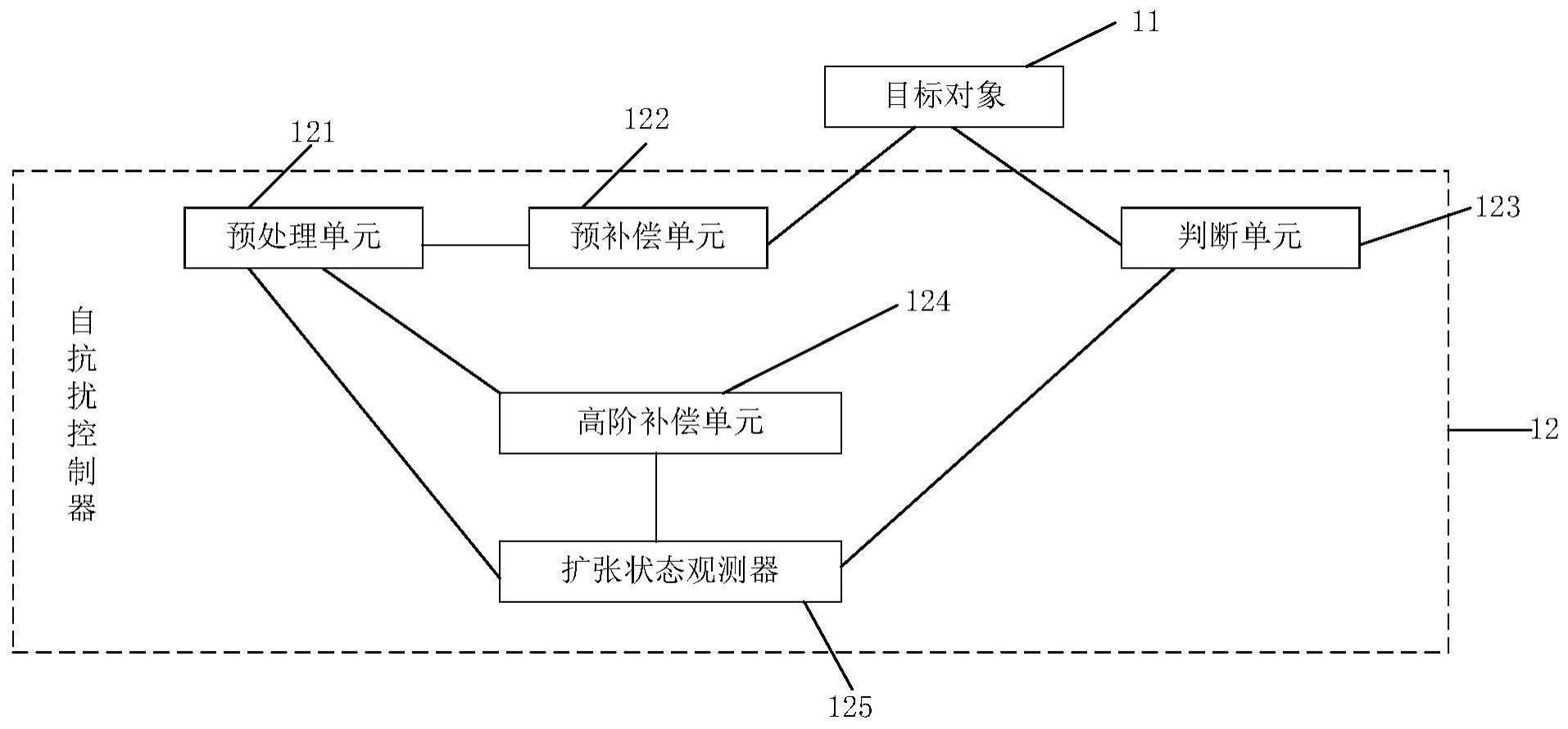
3、包括目标对象和自抗扰控制器,所述自抗扰控制器包括预处理单元、预补偿单元、判断单元、高阶补偿单元以及扩张状态观测器;其中:
4、所述预处理单元分别与所述预补偿单元、所述高阶补偿单元连接;所述目标对象分别与所述预补偿单元、所述判断单元连接;所述扩张状态观测器分别与所述预处理单元、所述判断单元连接;目标对象包括由一阶惯性环节串联成的高阶系统;
5、所述预处理单元,用于对所述目标对象的设定输出值以及预设数量的当前状态设定值进行预处理得到当前控制量,并将所述当前控制量分别发送至所述预补偿单元、所述高阶补偿单元;所述预设数量与所述自抗扰控制器的阶数关联;
6、所述预补偿单元,用于将所述当前控制量进行预补偿处理得到第一控制量,并将所述第一控制量发送至所述目标对象的目标数学模型;所述第一控制量用于控制所述目标对象的执行机构;
7、所述目标数学模型,用于根据所述第一控制量确定所述目标对象的当前输出值,并将所述当前输出值发送至判断单元;
8、所述判断单元,用于若确定所述当前输出值与所述设定输出值不一致,则将所述当前输出值发送至所述扩张状态观测器;
9、所述高阶补偿单元,用于将所述当前控制量进行高阶补偿处理得到第二控制量,并将所述第二控制量发送至所述扩张状态观测器;
10、所述扩张状态观测器,用于根据所述第二控制量以及所述当前输出值确定所述预设数量的下一状态设定值,并将各所述下一状态设定值发送至所述预处理单元;
11、所述预处理单元,还用于将所述下一状态设定值作为当前状态设定值,返回执行对所述目标对象的设定输出值以及预设数量的当前状态设定值进行预处理得到当前控制量,并将所述当前控制量分别发送至所述预补偿单元、所述高阶补偿单元的操作,直至所述当前输出值与所述设定输出值一致,基于所述当前控制量控制所述执行机构的变化。
12、根据本发明的另一方面,提供了一种自抗扰控制方法,该方法包括:包括:
13、通过预处理单元对目标对象的设定输出值以及预设数量的当前状态设定值进行预处理得到当前控制量,并将所述当前控制量分别发送至预补偿单元、高阶补偿单元;所述预设数量与自抗扰控制器的阶数关联;所述目标对象用目标数学模型表示;
14、通过所述预补偿单元将所述当前控制量进行预补偿处理得到第一控制量,并将所述第一控制量发送至所述目标对象的目标数学模型;所述第一控制量用于控制所述目标对象的执行机构;
15、通过所述目标数学模型根据所述第一控制量确定所述目标对象的当前输出值,并将所述当前输出值发送至判断单元;
16、通过所述判断单元若确定所述当前输出值与所述设定输出值不一致,则将所述当前输出值发送至扩张状态观测器;
17、通过所述高阶补偿单元将所述当前控制量进行高阶补偿处理得到第二控制量,并将所述第二控制量发送至所述扩张状态观测器;
18、通过所述扩张状态观测器根据所述第二控制量以及所述当前输出值确定所述预设数量的下一状态设定值,并将各所述下一状态设定值发送至所述预处理单元;
19、通过所述预处理单元将所述下一状态设定值作为当前状态设定值,返回执行对目标对象的设定输出值以及预设数量的当前状态设定值进行预处理得到当前控制量,并将所述当前控制量分别发送至预补偿单元、高阶补偿单元的操作,直至所述当前输出值与所述设定输出值一致,基于所述当前控制量控制所述执行机构的变化。
20、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的自抗扰控制方法。
21、本发明实施例的技术方案,包括目标对象和自抗扰控制器,自抗扰控制器包括预处理单元、预补偿单元、判断单元、高阶补偿单元以及扩张状态观测器;其中:预处理单元分别与预补偿单元、高阶补偿单元连接;目标对象分别与预补偿单元、判断单元连接;扩张状态观测器分别与预处理单元、判断单元连接;目标对象包括由一阶惯性环节串联成的高阶系统;预处理单元,用于对目标对象的设定输出值以及预设数量的当前状态设定值进行预处理得到当前控制量,并将当前控制量分别发送至预补偿单元、高阶补偿单元;预设数量与自抗扰控制器的阶数关联;预补偿单元,用于将当前控制量进行预补偿处理得到第一控制量,并将第一控制量发送至目标对象的目标数学模型;第一控制量用于控制目标对象的执行机构;目标数学模型,用于根据第一控制量确定目标对象的当前输出值,并将当前输出值发送至判断单元;判断单元,用于若确定当前输出值与设定输出值不一致,则将当前输出值发送至扩张状态观测器;高阶补偿单元,用于将当前控制量进行高阶补偿处理得到第二控制量,并将第二控制量发送至扩张状态观测器;扩张状态观测器,用于根据第二控制量以及当前输出值确定预设数量的下一状态设定值,并将各下一状态设定值发送至预处理单元;预处理单元,还用于将下一状态设定值作为当前状态设定值,返回执行对目标对象的设定输出值以及预设数量的当前状态设定值进行预处理得到当前控制量,并将当前控制量分别发送至预补偿单元、高阶补偿单元的操作,直至当前输出值与设定输出值一致,基于当前控制量控制执行机构的变化。通过执行本发明实施例提供的方案,可以实现提升高阶系统的跟踪性能和抗扰性能,为进一步推广自抗扰控制器在工业生产过程中的现场应用提供良好的支持。
22、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种自抗扰控制系统,其特征在于,包括目标对象和自抗扰控制器,所述自抗扰控制器包括预处理单元、预补偿单元、判断单元、高阶补偿单元以及扩张状态观测器;其中:
2.根据权利要求1所述的系统,其特征在于,
3.根据权利要求2所述的系统,其特征在于,
4.根据权利要求1所述的系统,其特征在于,
5.根据权利要求4所述的系统,其特征在于,
6.根据权利要求5所述的系统,其特征在于,
7.根据权利要求6的系统,其特征在于,
8.一种自抗扰控制方法,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求7中所述的自抗扰控制方法。
技术总结
本发明公开了一种自抗扰控制系统、方法及介质。其中,所述系统包括:预处理单元,用于对目标对象的设定输出值以及预设数量的当前状态设定值进行预处理得到当前控制量;预补偿单元,用于将当前控制量进行预补偿处理得到第一控制量;目标数学模型,用于根据第一控制量确定目标对象的当前输出值元;判断单元,用于若确定当前输出值与设定输出值不一致,则将当前输出值发送至扩张状态观测器;高阶补偿单元,用于将当前控制量进行高阶补偿处理得到第二控制量,并将第二控制量发送至扩张状态观测器。通过执行本方案,可以实现提升高阶系统的跟踪性能和抗扰性能,为进一步推广自抗扰控制器在工业生产过程中的现场应用提供良好的支持。
技术研发人员:戴成博,史耕金,刘韶杰,李东海
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!