一种多自由度可调节脚踏板及驾驶室的制作方法
本发明属于工程机械领域,具体涉及一种多自由度可调节脚踏板及驾驶室。
背景技术:
1、随着人类生活水平的不断提高及科学技术的不断发展,人们对产品的人机交互与操作舒适性的要求越来越高。机手在驾驶工程机械过程中各操纵部件在驾驶室中的布置位置直接影响操作舒适性,合理的人机布置不仅能提升操作的舒适度,还能提升产品的用户体验,增加产品的附加价值。
2、脚踏板作为工程机械驾驶室中主要的操纵部件之一,很大程度上决定了机手的驾驶姿势及驾驶舒适性。目前,脚踏板的布置一般是先用软件进行模拟,然后选购几个初始角度、角度行程等不同的脚踏板进行体验,如果都不合适,还需重新选购,如此往复。因此,有必要设计一种多自由度可调节的脚踏板,来克服现有技术中的缺陷。
3、公告号为cn 209590673 u的中国实用新型专利中,公开了一种可调节脚踏板,包括底板(1)、调节板(3)和锁紧机构,调节板(3)右端转动连接底板(1)右端,调节板(3)左端上开设多个调节通孔,调节通孔通过锁紧机构固定连接底板(1)左端。通过该装置可以针对不同身高的人进行调节脚踏板角度,提高用户使用舒适度。
4、公告号为cn 215811644 u的中国实用新型专利中,公开了一种脚踏板模拟装置,包括底板、搁脚板、高度调节结构、前后调节滑轨以及角度调节结构,高度调节结构包括z向蜗杆以及z向涡轮,z向涡轮安装于底板,z向蜗杆与z向涡轮配合,前后调节滑轨包括第一轨道以及第二轨道,第一轨道与z向涡轮连接,第二轨道滑动安装于第一轨道,角度调节结构包括角度调节涡轮以及角度调节蜗杆,角度调节涡轮安装于第二轨道,角度调节蜗杆与角度调节涡轮配合,搁脚板与角度调节涡轮连接,通过上述设计,脚踏板模拟装置的高度调节结构调节搁脚板高度,前后调节滑轨调节搁脚板x向位置,角度调节结构调节搁脚板角度,使脚踏板模拟装置通过调节搁脚板的高度、位置以及角度能够适用不同类型的车辆。
5、可见,现有技术中的方案主要存在以下问题:
6、(1)现有技术中脚踏板调整完状态后,只能用于静态模拟脚踏板的初始角度和位置,无法进行踩踏运动模拟。
7、(2)现有技术中的脚踏板调节机构较为复杂,角度和位置调节及其锁止过程较为繁琐,或者只有单一参数调节,只能调节一个维度,而且不具有无极调节的功能,无法完全满足用户使用需求。
8、(3)现有技术方案中各调节点缺失刻度显示,每次调节均需手动测量,效率较低。
技术实现思路
1、针对上述问题,本发明提出一种多自由度可调节脚踏板及驾驶室,可以根据驾驶员的身高体重将脚踏板调整到舒适角度和位置,是一种动态真实的操作过程。
2、为了实现上述技术目的,达到上述技术效果,本发明通过以下技术方案实现:
3、第一方面,本发明提供了一种多自由度可调节脚踏板,包括:上踏面、脚踏板底板、销轴、滑道、牵引件、第一调节滑块和第二调节滑块;
4、所述上踏面与所述脚踏板底板通过所述销轴相连;
5、所述滑道设于所述脚踏板底板上靠近上踏面的一侧,所述滑道的上表面设有刻度线;
6、所述牵引件的一端与所述上踏面相连,另一端与所述第二调节滑块相连;
7、所述第一调节滑块和第二调节滑块均与所述滑道滑动连接,所述第一调节滑块与所述滑道上表面的刻度线配合确定上踏面的终点角度,所述第二调节滑块与所述滑道上表面的刻度线配合确定上踏面的初始角度。
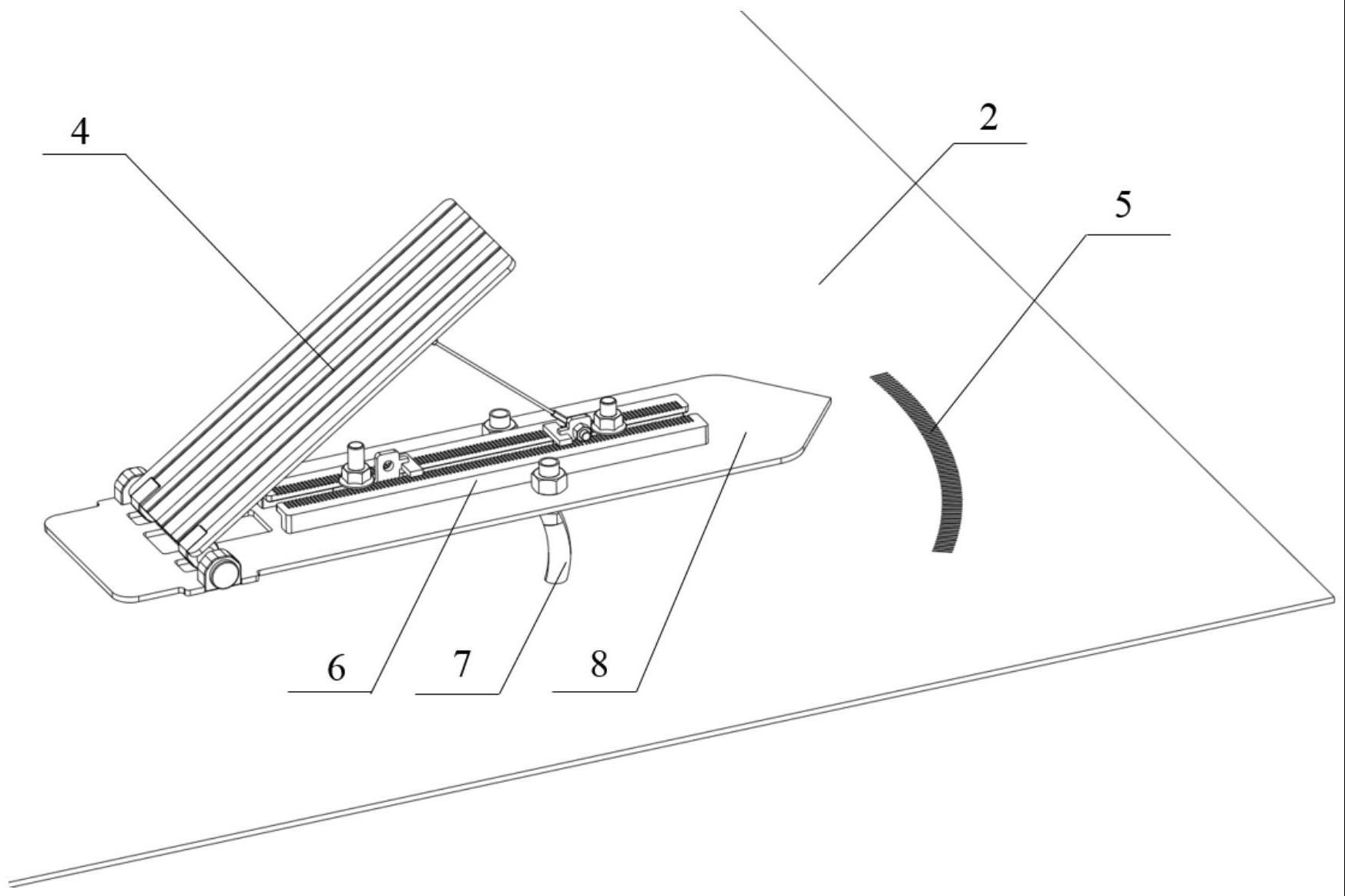
8、可选地,所述多自由度可调节脚踏板还包括轴体、扇形滑道和扇形角度刻度线;
9、所述轴体设于所述脚踏板底板上远离所述上踏面的一侧,且位于所述扇形滑道内,可沿着所述扇形滑道旋转;
10、所述扇形角度刻度线靠近所述脚踏板底板上远离所述销轴的一端,用于指示所述多自由度可调节脚踏板在预设方向的旋转角度。
11、可选地,所述上踏面上靠近所述脚踏板底板的一侧设有加强筋,所述牵引件的一端与所述加强筋相连,另一端与所述第二调节滑块相连。
12、可选地,所述滑道包括相对设置的第一凸起块和第二凸起块,所述第一调节滑块和第二调节滑块部分位于所述第一凸起块和第二凸起块之间的间隙内。
13、可选地,所述第一调节滑块和第二调节滑块结构相同,均包括滑块底座、螺柱和指示板;
14、所述滑块底座设于所述滑道内;
15、所述螺柱和指示板均设于所述滑块底座上;
16、所述螺柱部分凸出于所述滑道之外;
17、所述指示板部分凸出于所述滑道之外,部分与所述滑道上表面的刻度线贴合。
18、可选地,所述指示板包括竖板和横板;
19、所述竖板的一端与所述滑块底座垂直相连,另一端凸出于所述滑道之外;
20、所述横板的一端与所述竖板垂直相连,且与所述滑道上表面的刻度线贴合。
21、可选地,所述第一调节滑块和第二调节滑块还包括紧固件,所述紧固件将所述第一调节滑块或第二调节滑块固定在所述滑道上。
22、可选地,所述销轴上套设有复位扭簧,所述复位扭簧的其中一个弹臂与所述上踏面相连,另一个弹臂与所述脚踏板底板相连。
23、可选地,所述牵引件为钢丝绳。
24、第二方面,本发明提供了一种驾驶室,包括:地板、座椅和第一方面中任一项所述的多自由度可调节脚踏板;
25、所述多自由度可调节脚踏板和座椅装配在所述地板上;
26、所述多自由度可调节脚踏板围绕设于其底部的轴体沿着所述地板上的扇形滑道进行旋转;
27、所述地板上设有与扇形角度刻度线,所述扇形角度刻度线用于指示所述多自由度可调节脚踏板在预设方向的旋转角度。
28、与现有技术相比,本发明的有益效果:
29、本发明提供的一种多自由度可调节脚踏板及驾驶室,驾驶员可以根据自身身高体重将脚踏板调整到舒适角度和位置,然后再进行工作操作,是一种动态真实的操作过程。
30、本发明提供的一种多自由度可调节脚踏板属多自由度无极调节,包括脚踏板初始角度、脚踏板运动行程、脚踏板的左右安装角度等调节内容,兼具多种自由度无极调节的同时,设计合理,结构简单,生产成本低,有利于提高企业生产效益。
31、本发明在各调节维度上均设有刻度指示,调节方便,可读性良好。
32、本发明主要用于人机总布置的实验研究,也可在此基础上增加传动机构用于工程机械实车中,可以提高实车驾驶室人机操作舒适性。
技术特征:
1.一种多自由度可调节脚踏板,其特征在于,包括:上踏面、脚踏板底板、销轴、滑道、牵引件、第一调节滑块和第二调节滑块;
2.根据权利要求1所述的一种多自由度可调节脚踏板,其特征在于:所述多自由度可调节脚踏板还包括轴体、扇形滑道和扇形角度刻度线;
3.根据权利要求1所述的一种多自由度可调节脚踏板,其特征在于:所述上踏面上靠近所述脚踏板底板的一侧设有加强筋,所述牵引件的一端与所述加强筋相连,另一端与所述第二调节滑块相连。
4.根据权利要求1所述的一种多自由度可调节脚踏板,其特征在于:所述滑道包括相对设置的第一凸起块和第二凸起块,所述第一调节滑块和第二调节滑块部分位于所述第一凸起块和第二凸起块之间的间隙内。
5.根据权利要求1所述的一种多自由度可调节脚踏板,其特征在于:所述第一调节滑块和第二调节滑块结构相同,均包括滑块底座、螺柱和指示板;
6.根据权利要求5所述的一种多自由度可调节脚踏板,其特征在于:所述指示板包括竖板和横板;
7.根据权利要求5所述的一种多自由度可调节脚踏板,其特征在于:所述第一调节滑块和第二调节滑块还包括紧固件,所述紧固件将所述第一调节滑块或第二调节滑块固定在所述滑道上。
8.根据权利要求1所述的一种多自由度可调节脚踏板,其特征在于:所述销轴上套设有复位扭簧,所述复位扭簧的其中一个弹臂与所述上踏面相连,另一个弹臂与所述脚踏板底板相连。
9.根据权利要求1所述的一种多自由度可调节脚踏板,其特征在于:所述牵引件为钢丝绳。
10.一种驾驶室,其特征在于,包括:地板、座椅和权利要求1-9中任一项所述的多自由度可调节脚踏板;
技术总结
本发明公开了一种多自由度可调节脚踏板及驾驶室,所述多自由度可调节脚踏板包括上踏面、脚踏板底板、销轴、滑道、牵引件、第一调节滑块和第二调节滑块;所述上踏面与所述脚踏板底板通过所述销轴相连;所述滑道设于所述脚踏板底板上靠近上踏面的一侧,所述滑道的上表面设有刻度线;所述牵引件的一端与所述上踏面相连,另一端与所述第二调节滑块相连;所述第一调节滑块和第二调节滑块均与所述滑道滑动连接,所述第一调节滑块与所述滑道上表面的刻度线配合确定上踏面的终点角度,所述第二调节滑块与所述滑道上表面的刻度线配合确定上踏面的初始角度。本发明可以根据驾驶员的身高体重将脚踏板调整到舒适角度和位置,是一种动态真实的操作过程。
技术研发人员:潘玲玲,梁龙远,马峰
受保护的技术使用者:江苏徐工工程机械研究院有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!