应用于多种类型AGV的协同调度控制方法
本发明属于agv控制,涉及应用于多种类型agv的协同调度控制方法。
背景技术:
1、agv是指装备有电磁或光学等自动导引装置,使用导航控制器计算agv姿态及路径,从而沿着固定轨道或自由路径行驶以实现搬运任务的轮式机器人,多台agv可在调度系统的统一调度下进行agv集群,以实现复杂的搬运任务,agv调度系统的主要功能包括系统管理、地图管理、设备管理、任务调度、路径规划、交通管制等。
2、一般发明中提出的agv调度方法大多关注路径规划与交通管制算法,对系统中有多种不同类型agv的协同调度问题研究较少,实际需求中的agv调度情况是较为复杂的,调度系统所控制多台agv的尺寸、导引方式、驱动方式、行驶方式及上装机构方式都有很大差别,并且系统中可能存在双车和多车联动情况,传统地图绘制方法没有考虑这些复杂需求,无法在多种类型agv场景中进行多车协同调度,为了解决这种问题,本发明提出了应用于多种类型agv的协同调度控制方法,并进行了详细的说明。
技术实现思路
1、本发明的目的在于提供应用于多种类型agv的协同调度控制方法,以解决上述背景技术中提出的问题。
2、本发明的目的可通过下列技术方案来实现:
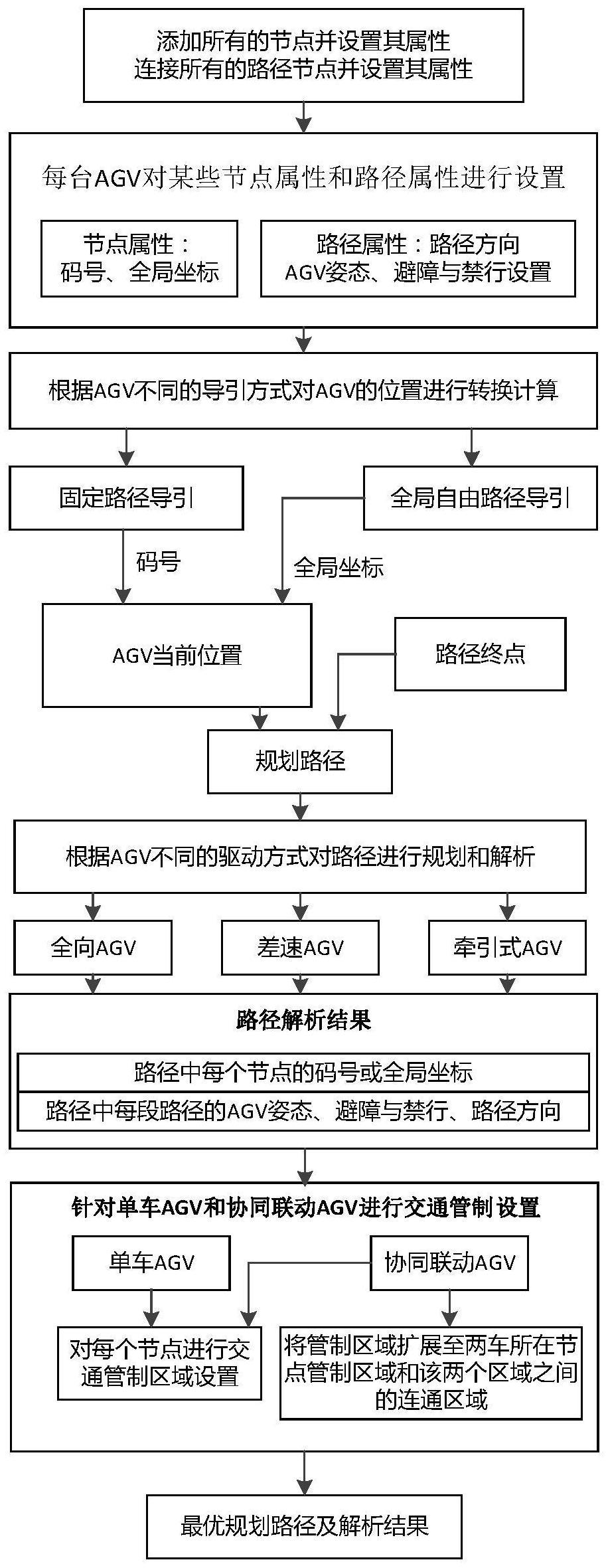
3、应用于多种类型agv的协同调度控制方法,所述协同调度控制方法的具体步骤如下:
4、步骤一:在地图中添加节点并设置其属性,连接路径并设置其属性;
5、步骤二:针对每台agv对特定节点属性和路径属性进行设置;
6、步骤三:根据agv不同的导引方式对agv的位置进行转换计算;
7、步骤四:根据agv不同的驱动方式对路径进行规划和解析;
8、步骤五:针对单车agv和协同联动agv进行交通管制设置。
9、在上述的应用于多种类型agv的协同调度控制方法中,步骤一中,所述节点包括激光节点、二维码节点和复合激光节点,节点属性包括节点号、节点类型、名称、码号和全局坐标信息。
10、在上述的应用于多种类型agv的协同调度控制方法中,步骤一中,所述路径属性包括路径方向属性、路径上行驶agv的姿态属性、避障与禁行设置属性和圆弧路径半径属性,其中,
11、路径方向属性:路径方向属性分为单向和双向两种,代表允许行驶的方向;
12、路径上行驶agv的姿态属性:定义了agv在该路径行驶时的车头方向角度;
13、避障与禁行设置属性:定义了agv在该路径行驶时应使用的避障等级或禁止agv通过该路径;
14、圆弧路径半径属性:表示路径为圆弧时的对应圆弧半径,若为直线路径,则该属性为0。
15、在上述的应用于多种类型agv的协同调度控制方法中,步骤三中,agv的导引方式主要分为固定路径导引和全局自由路径导引,其中,
16、固定路径导引:当agv为固定路径导引时,agv的位置是由路径连接点处的地标卡号所代表的,需要根据agv反馈的当前位置码号和地图中该节点针对当前agv的配置,实现对agv节点的计算;
17、全局自由路径导引:当agv为全局自由路径导引时,agv的位置是由当前全局坐标所确定的,需要根据全局坐标和地图中节点的全局坐标配置对agv的节点进行计算。
18、在上述的应用于多种类型agv的协同调度控制方法中,步骤四中,按照驱动方式的不同,可将agv分为全向agv、差速agv与牵引式agv,其中,
19、全向agv:全向agv是指可全向移动的agv,包括双舵轮和麦轮;
20、差速agv:差速agv是指可原地旋转和前后曲线行驶的agv;
21、牵引式agv:牵引式agv指只能前向曲线行驶的agv。
22、在上述的应用于多种类型agv的协同调度控制方法中,步骤五中,交通管制的设置操作如下:
23、对每个节点进行交通管制区域设置,针对某节点,根据不同agv的车体尺寸和避障范围设置不同的区域半径,该半径内圆形区域(含边缘点)的所有节点即为该节点的交通管制区。
24、与现有技术相比,本发明应用于多种类型agv的协同调度控制方法的优点为:
25、(1)本发明专注于多种类型agv的协同调度控制方法,可在同一地图中对多台不同类型的agv进行协调控制,提高了系统的适应性。
26、(2)本发明对agv进行了功能分类,并提供了对每台agv的节点属性及路径属性单独控制功能。
27、(3)本发明可实现多台不同驱动方式和导引方式的单车agv调度,并且可同时对单车和多车联动的混合场景进行灵活调度。
技术特征:
1.应用于多种类型agv的协同调度控制方法,其特征在于,所述协同调度控制方法的具体步骤如下:
2.根据权利要求1所述的应用于多种类型agv的协同调度控制方法,其特征在于,步骤一中,所述节点包括激光节点、二维码节点和复合激光节点,节点属性包括节点号、节点类型、名称、码号和全局坐标信息。
3.根据权利要求1所述的应用于多种类型agv的协同调度控制方法,其特征在于,步骤一中,所述路径属性包括路径方向属性、路径上行驶agv的姿态属性、避障与禁行设置属性和圆弧路径半径属性,其中,
4.根据权利要求1所述的应用于多种类型agv的协同调度控制方法,其特征在于,步骤三中,agv的导引方式主要分为固定路径导引和全局自由路径导引,其中,
5.根据权利要求1所述的应用于多种类型agv的协同调度控制方法,其特征在于,步骤四中,按照驱动方式的不同,可将agv分为全向agv、差速agv与牵引式agv,其中,
6.根据权利要求1所述的应用于多种类型agv的协同调度控制方法,其特征在于,步骤五中,交通管制的设置操作如下:
技术总结
本发明提供了应用于多种类型AGV的协同调度控制方法,协同调度控制方法的具体步骤如下:步骤一:在地图中添加节点并设置其属性,连接路径并设置其属性;步骤二:针对每台AGV对特定节点属性和路径属性进行设置;步骤三:根据AGV不同的导引方式对AGV的位置进行转换计算;步骤四:根据AGV不同的驱动方式对路径进行规划和解析;本发明专注于多种类型AGV的协同调度控制方法,可在同一地图中对多台不同类型的AGV进行协调控制,提高了系统的适应性,本发明对AGV进行了功能分类,并提供了对每台AGV的节点属性及路径属性单独控制功能,本发明可实现多台不同驱动方式和导引方式的单车AGV调度,并且可同时对单车和多车联动的混合场景进行灵活调度。
技术研发人员:孙天,楼佩煌,钱晓明,张沪松,张悦
受保护的技术使用者:南京航空航天大学苏州研究院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!