一种智能辅助驾驶电动观光车的控制方法及系统与流程
本发明涉及智能驾驶领域,具体是一种智能辅助驾驶电动观光车的控制方法及系统。
背景技术:
1、目前,传统的观光车需要大量驾驶员重复操作,消耗不少人力物力。而现有的自动驾驶观光车成本太高,并且功能较为单一,适用范围较小,智能化底盘控制、辅助驾驶控制系统的安全性有待提升,操作便捷性有待改善。
2、如现有中国专利《一种新型电动无人驾驶观光车》(专利号:cn201920817329.5)公开了一种新型电动无人驾驶观光车,车本体前侧车头下端倾斜安装有循迹传感器,两个安装架上均固定有避障传感器。该现有技术虽然实现了虽然实现了自动化循迹驾驶,但是该控制方案需要循迹传感器安装在车头下端运用的是车道扫描的方法,这种方法要求车道状况良好,车道线痕迹明显,对于环境要求较高,适用范围较小。并且在车辆循迹驾驶时,对巡航车速等缺少系统化智能控制,存在安全隐患。
3、如现有中国专利《一种自动驾驶电动观光车避障系统》(专利号:cn201620689244.x)公开了一种自动驾驶电动观光车避障系统,包括控制器、定位模块、减速制动模块、障碍监测模块,控制器分别与定位模块、减速制动模块、障碍监测模块连接。实现了电动观光车自动驾驶及减速制动、障碍避让。该现有技术虽然实现了虽然实现了自动避障,但是此自动驾驶观光车避障系统中障碍检测模块为红外热释传感器,只在检测到行人或动物等发热物体是才会触发,范围太小,安全性欠缺。避障功能的完整度是保证车辆能否正常运行的必要条件,且避障控制流程需要最大程度保证车辆运行安全性。
4、如现有中国专利《一种无人驾驶观光车的控制方法及其系统》(专利号:cn201910865371.9)公布了一种无人驾驶观光车的控制方法及其系统,其无人驾驶观光车通过信息采集单元实时采集观光车周围环境信息进行处理分析,只在观光车前部设置摄像器件,雷达设备设置在观光车的四周,识别出是否存在车道线和障碍物,并将识别结果发送给控制单元;此控制方法及系统不足之处在于:在车道线不明晰的场景无法运行;此控制方法中关于线控底盘满足车辆行驶安全的功能不足,例如防溜车,限速行驶等。
5、因此,如何确保车辆运行过程中的安全性,是本领域技术人员需要解决的问题。
技术实现思路
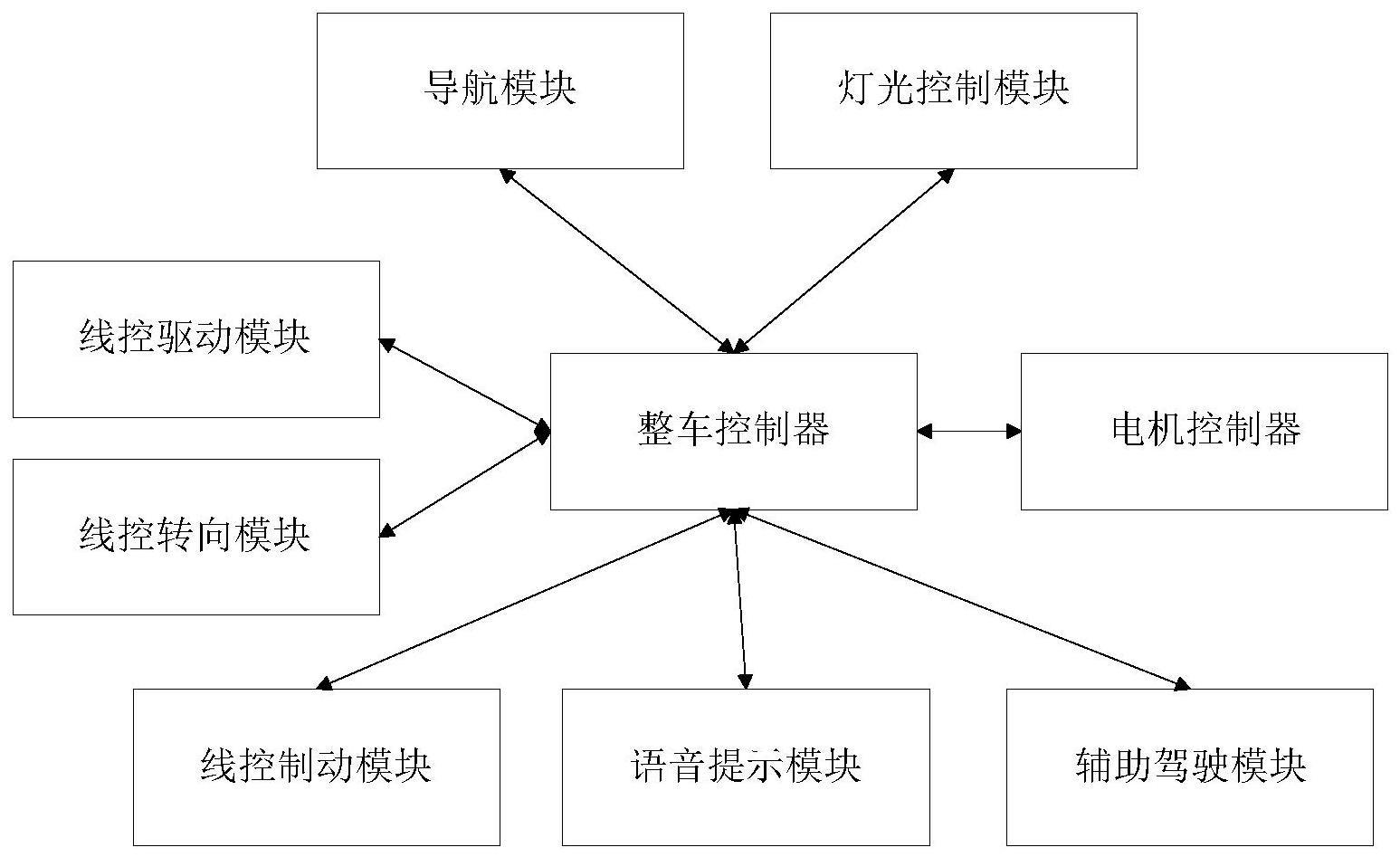
1、本发明的目的在于克服现有技术的不足,提供一种智能辅助驾驶电动观光车的控制系统,包括整车控制器、电机控制器、辅助驾驶模块、语音提示模块、灯光控制模块、线控制动模块、线控转向模块、线控驱动模块、导航模块;所述的电机控制器、辅助驾驶模块、语音提示模块、灯光控制模块、线控制动模块、线控转向模块、线控驱动模块、导航模块分别与所述的整车控制器连接。
2、优选的,所述的辅助驾驶模块包括感知模块、定位模块、坡道辅助模块、路径规划模块;所述的感知模块、定位模块、坡道辅助模块、路径规划模块分别与所述的整车控制连接。
3、优选的,所述的感知模块包括激光雷达、摄像头、超声波雷达;所述的激光雷达、摄像头、超声波雷达分别与所述的整车控制器连接。
4、优选的,所述的定位模块包括测量定位模块和惯性导航模块;所述的测量定位模块和惯性导航模块分别与所述的整车控制器连接。
5、应用于所述的一种智能辅助驾驶电动观光车的控制系统的一种智能辅助驾驶电动观光车的控制方法,包括:
6、获取待行驶的观光点定位信息,通过路径规划模块根据待行驶的观光点定位信息,生成观光规划路径;
7、根据观光规划路径,通过测量定位模块与惯导系统实现定位,通过整车控制器控制观光车根据观光规划路径进入运行;
8、观光车以预设加速度进行启动、保持预设定速巡航速度行驶以及关键路段限速控制,同时通过感知模块对观光车行驶过程中进行自动避障,和通过坡道辅助模块辅助观光车在坡道行驶,直到观光车完成观光规划路径。
9、进一步的,所述的获取待行驶的观光点定位信息,通过路径规划模块根据待行驶的观光点定位信息,生成观光规划路径,包括:
10、步骤一,获取观光目的地信息和观光起始地位置信息,通过路径规划模块得到初始路径;
11、步骤二,根据初始路径获取路径沿线的观光点数量及观光点位置信息,对观光点进行分类,分别获取各观光点的观光流量,若观光点的观光流量不大于设定观光流量阈值,则该观光点为一类观光点,否则为二类观光点,根据一类观光点的位置信息,对初始路径进行修正,将各个一类观光点串联在路径中,得到修正路径;
12、步骤三,获取修正路径中各一类观光点之间的距离,根据观光车电量的使用电量和每公里耗电量分别计算相邻两个一类观光点之间观光车所需电量,若观光车所需电量大于观光车的使用电量,则在相邻两个一类观光点之间设置距离最近的二类观光点,对修正路径进行二次修正,将设置的二类观光点串联在修正路径中,得到规划观光路径。
13、进一步的,所述的观光车以预设加速度进行启动、保持预设定速巡航速度行驶以及关键路段限速控制,其中的关键路段为设定的限速路段。
14、进一步的,所述的通过感知模块对观光车行驶过程中进行自动避障,包括:
15、当需要自动绕障时,通过感知模块中的激光雷达、摄像头与超声波雷达识别观光车周围障碍物或人,并将道路信息反馈给整车控制器,整车控制器在接收到障碍物或人的图像数据后对雷达设备输送的距离信息进行处理,根据距离做出判断,并发出减速命令或刹车命令或转向命令,电机控制器根据接收到相应的命令后控制电机的工作状态,并根据避障算法控制观光车停止在预设安全距离处。
16、进一步的,所述的通过坡道辅助模块辅助观光车在坡道行驶,包括:在坡道停车或起步时,前进档的情况下,若车辆出现后溜,转速传感器检测到信号由整车控制器发送指令给电机,电机从扭矩模式进入转速模式,并且期望转速为0,电机自己产生一个平衡坡道的驱动力,防止观光车后溜。
17、本发明的有益效果是:本发明通过观光车底盘线控化改造,加上搭载适合观光车运营场景的辅助驾驶功能,解决了传统观光车的智能化程度低、驾驶员操作疲劳的问题,同时相比自动驾驶观光车,成本更低,有利于快速市场推广。
技术特征:
1.一种智能辅助驾驶电动观光车的控制系统,其特征在于,包括整车控制器、电机控制器、辅助驾驶模块、语音提示模块、灯光控制模块、线控制动模块、线控转向模块、线控驱动模块、导航模块;所述的电机控制器、辅助驾驶模块、语音提示模块、灯光控制模块、线控制动模块、线控转向模块、线控驱动模块、导航模块分别与所述的整车控制器连接。
2.根据权利要求1所述的一种智能辅助驾驶电动观光车的控制系统,其特征在于,所述的辅助驾驶模块包括感知模块、定位模块、坡道辅助模块、路径规划模块;所述的感知模块、定位模块、坡道辅助模块、路径规划模块分别与所述的整车控制连接。
3.根据权利要求3所述的一种智能辅助驾驶电动观光车的控制系统,其特征在于,所述的感知模块包括激光雷达、摄像头、超声波雷达;所述的激光雷达、摄像头、超声波雷达分别与所述的整车控制器连接。
4.根据权利要求4所述的一种智能辅助驾驶电动观光车的控制系统,其特征在于所述的定位模块包括测量定位模块和惯性导航模块;所述的测量定位模块和惯性导航模块分别与所述的整车控制器连接。
5.应用于权利要求4所述的一种智能辅助驾驶电动观光车的控制系统的一种智能辅助驾驶电动观光车的控制方法,其特征在于,包括:
6.根据权利要求5所述的一种智能辅助驾驶电动观光车的控制方法,其特征在于,所述的获取待行驶的观光点定位信息,通过路径规划模块根据待行驶的观光点定位信息,生成观光规划路径,包括:
7.根据权利要求5所述的一种智能辅助驾驶电动观光车的控制方法,其特征在于,所述的观光车以预设加速度进行启动、保持预设定速巡航速度行驶以及关键路段限速控制,其中的关键路段为设定的限速路段。
8.根据权利要求5所述的一种智能辅助驾驶电动观光车的控制方法,其特征在于,所述的通过感知模块对观光车行驶过程中进行自动避障,包括:
9.根据权利要求5所述的一种智能辅助驾驶电动观光车的控制方法,其特征在于,所述的通过坡道辅助模块辅助观光车在坡道行驶,包括:在坡道停车或起步时,前进档的情况下,若车辆出现后溜,转速传感器检测到信号由整车控制器发送指令给电机,电机从扭矩模式进入转速模式,并且期望转速为0,电机产生一个平衡坡道的驱动力,防止观光车后溜。
技术总结
本发明公开了一种智能辅助驾驶电动观光车的控制系统,包括整车控制器、电机控制器、辅助驾驶模块、语音提示模块、灯光控制模块、线控制动模块、线控转向模块、线控驱动模块、导航模块;所述的电机控制器、辅助驾驶模块、语音提示模块、灯光控制模块、线控制动模块、线控转向模块、线控驱动模块、导航模块分别与所述的整车控制器连接。通过本发明提供的技术方案,可以解决传统观光车的智能化程度低、驾驶员操作疲劳的问题,同时相比自动驾驶观光车,成本更低,有利于快速市场推广。
技术研发人员:赵文轩,杨丽雯,王叶梓,姚远,李宏
受保护的技术使用者:成都云科新能汽车技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!