一种基于导航欺骗技术辨识无人机系统模型参数的方法
本发明涉及导航欺骗反无人机领域,具体涉及一种基于导航欺骗技术辨识无人机系统模型参数的方法。
背景技术:
1、为有效应对当前无人机“黑飞”事件,目前已提出基于“侦、扰、骗、控、毁”的反无人机技术体系,其中导航欺骗技术因通用性强,技术实现难度适中,作用效果可控等优势正得到越来越广泛的应用。在导航欺骗反无人机建模方面,已建成状态空间模型描述,并基于二次型最优估计器和pd补偿器方法设计欺骗器,但对于非合作无人机而言,二次型估计器量测噪声、过程噪声未知,降低了工程实用性。
2、本发明以提高导航欺骗反无人机建模实用性出发,旨在提出一种基于导航欺骗技术辨识无人机系统模型参数的方法,将虚假的卫星导航欺骗信号作为系统输入,雷达或第三方探测设备获取的无人机位置、速度、加速度信息等为系统输出,采用数值状态子空间辨识方法,实现对非合作无人机系统状态空间模型参数及噪声协方差矩阵的估计,进而实现欺骗控制器设计。
技术实现思路
1、本发明提出了一种基于导航欺骗技术辨识无人机系统模型参数的方法,利用虚假的卫星导航欺骗信号作为系统输入,受骗无人机的运动位置、速度、加速度信息作为系统输出,采用数值状态子空间辨识算法,实现对非合作无人机系统状态空间模型参数及噪声协方差矩阵的估计,进而实现欺骗控制器设计。该方法可应用于导航欺骗反无人机领域,具备很强的实用价值。为了达到上述发明目的,本发明采用的技术方案是:
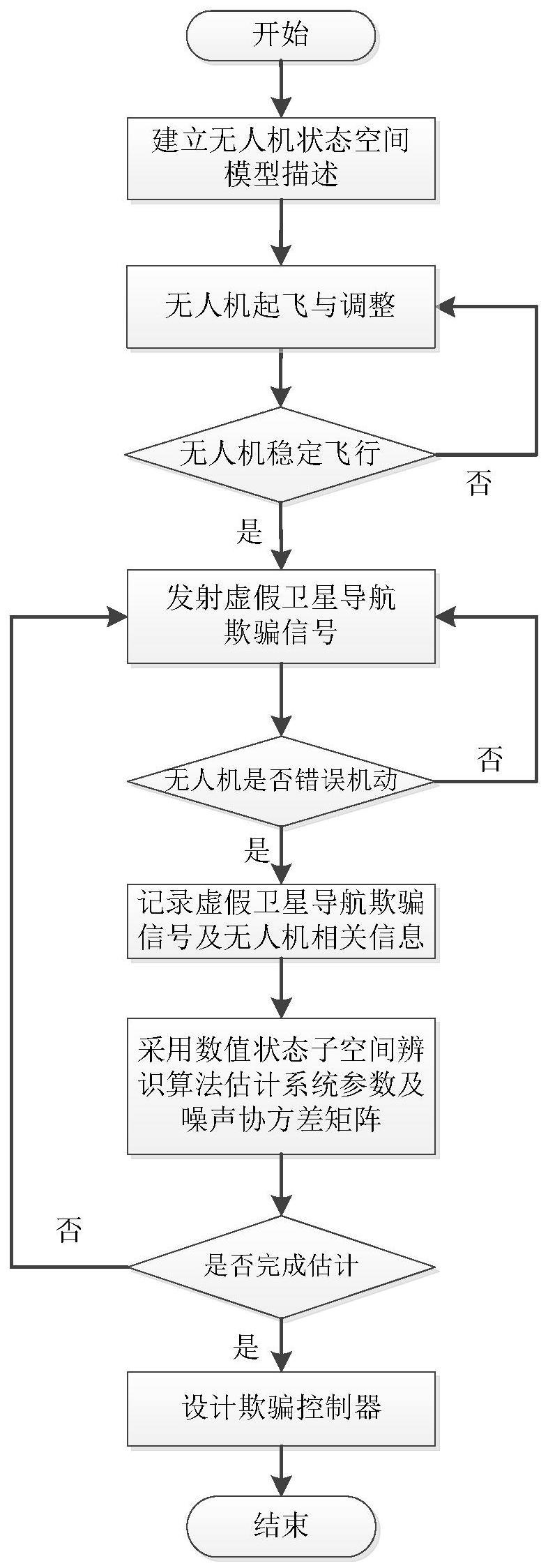
2、一种基于导航欺骗技术辨识无人机系统模型参数的方法,包括以下步骤:
3、步骤(1):首先将无人机按照状态空间模型进行描述,给出系统状态方程和量测方程,执行步骤(2);
4、步骤(2):待无人机处于稳定飞行状态时,通过发射虚假的卫星导航欺骗信号,迫使无人机中的导航接收机接收并使用虚假的卫星导航欺骗信号,进而产生错误的机动动作,包括偏离预设航线、飞行盘旋;若未能实现对无人机的欺骗,即未能使无人机产生错误的机动动作,包括偏离预设航线、飞行盘旋,重复步骤(2),直至欺骗成功,执行步骤(3);
5、步骤(3):记录发射的虚假卫星导航欺骗信号,包括欺骗位置、速度、多普勒信息作为系统输入变量;记录雷达或第三方探测设备获取的无人机位置、速度、加速度信息作为系统输出变量,执行步骤(4);
6、步骤(4):采用数值状态子空间辨识算法,依据输入、输出变量,估计系统状态空间模型参数及噪声协方差矩阵信息,若因数据量不足未能完成参数及噪声协方差矩阵估计,执行步骤(2),否则执行步骤(5);
7、步骤(5):利用虚假的卫星导航欺骗信号与雷达或第三方探测设备构成系统闭环辨识条件,在估计系统状态空间参数及噪声协方差矩阵的基础上,进一步为实现导航欺骗反无人机目标设计欺骗控制器。
8、本发明的有益效果在于:
9、通用性强:本发明对凡是使用卫星导航系统作为时空信息来源之一的无人机均有效,利用状态空间子空间系统辨识算法,可获取精确无人机系统模型;
10、可提高欺骗控制器控制精度:本发明可利用导航欺骗技术辨识无人机系统状态空间模型参数及噪声协方差矩阵,并将其作为先验知识设计欺骗控制器,大大提高了欺骗控制器控制精度。
技术特征:
1.一种基于导航欺骗技术辨识无人机系统模型参数的方法,其特征在于,包括以下步骤:
技术总结
本发明属于导航欺骗反无人机领域,具体公开了一种基于导航欺骗技术辨识无人机系统模型参数的方法。该方法包括:步骤(1)首先将无人机按照状态空间模型进行描述;步骤(2)发射虚假的卫星导航欺骗信号使无人机接收,进而产生错误的机动动作;步骤(3)记录发射的虚假卫星导航欺骗信号作为系统输入。记录雷达或第三方探测设备获取的无人机位置、速度、加速度信息作为系统输出;步骤(4)采用数值状态子空间辨识算法估计系统状态空间模型参数及噪声协方差矩阵;步骤(5)利用步骤(4)估计结果设计欺骗控制器。本发明通用性强,可有效提高欺骗控制器控制精度,为实现导航欺骗条件下的无人机定点诱骗提供技术支撑。
技术研发人员:马超,杨俊,周超,王光明,胡梅,刘宗敏
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!