一种基于目标规划的无人矿车纵向分段PID控制方法与流程
本发明涉及无人矿车自动驾驶,特别涉及一种基于目标规划的无人矿车纵向分段pid控制方法。
背景技术:
1、现阶段矿山的矿产采取存在诸多问题,如:矿区运输环境差,安全风险高,易发事故;人员方面招工难,职业病多发等,矿车无人驾驶是解决上述问题的一种有效方案。但矿车的无人驾驶算法还不够完善,正在不断完善中。矿车的无人驾驶的一大难关是对矿车的精确控制,导致矿车难以精确控制有两方面,一方面是矿车存在比较大的执行器响应延迟,导致不能精确控制;另一方面是矿车本身较大,装载后较重,在路面不好的状况下,精确控制较难。
2、现有技术的不足之处在于,在矿车存在较大的油门和制动执行器响应延迟情况下,矿车精确的纵向控制存在控制精度不足的问题,且控制油门和制动的下发量不准确,会导致车辆控制效果差。
技术实现思路
1、本发明的目的克服现有技术存在的不足,为实现以上目的,采用一种基于目标规划的无人矿车纵向分段pid控制方法,以解决上述背景技术中提出的问题。
2、一种基于目标规划的无人矿车纵向分段pid控制方法,具体步骤包括:
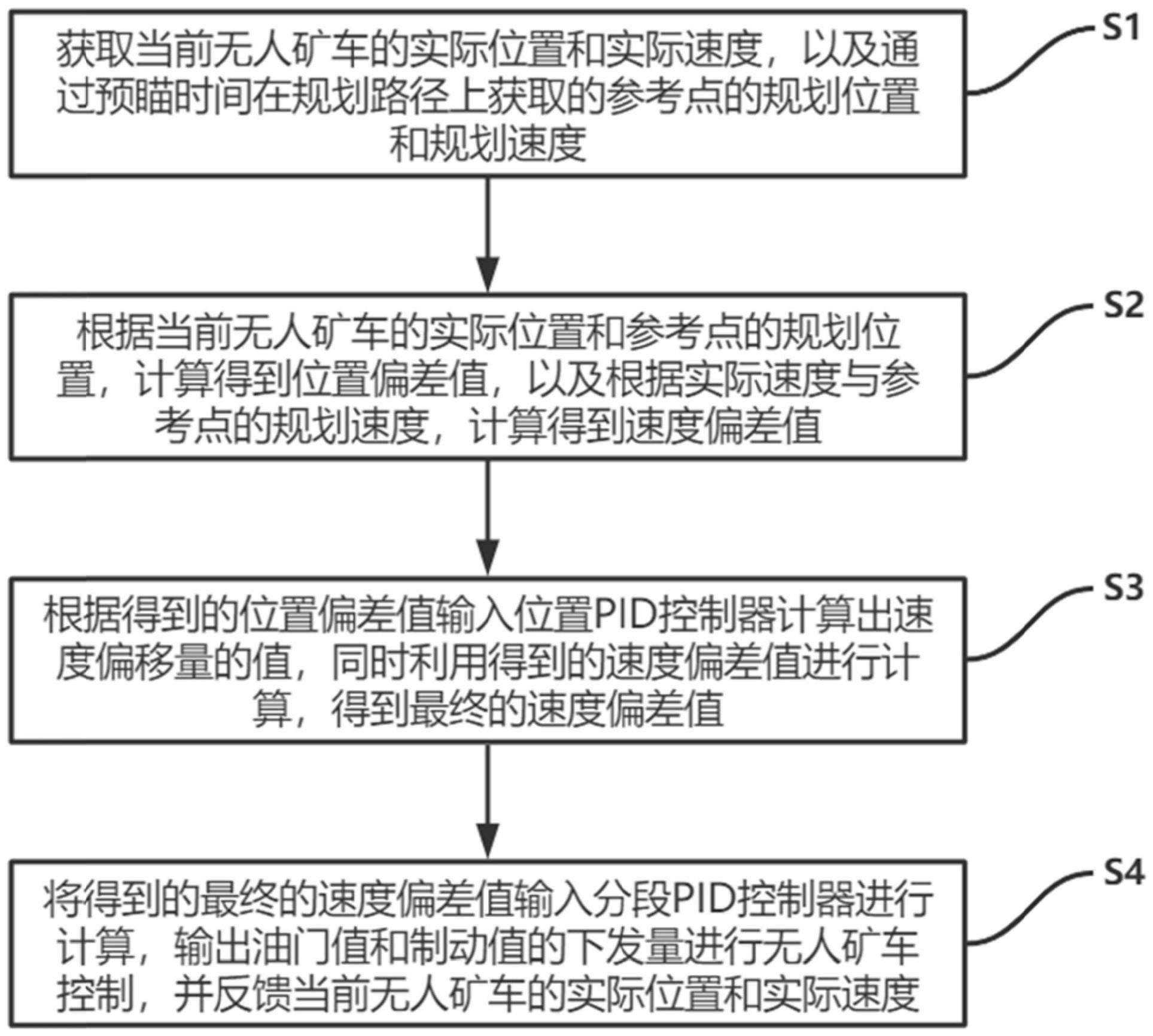
3、步骤s1、获取当前无人矿车的实际位置和实际速度,以及通过预瞄时间在规划路径上获取的参考点的规划位置和规划速度;
4、步骤s2、根据当前无人矿车的实际位置和参考点的规划位置,计算得到位置偏差值,以及根据实际速度与参考点的规划速度,计算得到速度偏差值;
5、步骤s3、根据得到的位置偏差值输入位置pid控制器计算出速度偏移量的值,同时利用得到的速度偏差值进行计算,得到最终的速度偏差值;
6、步骤s4、将得到的最终的速度偏差值输入分段pid控制器进行计算,输出油门值和制动值的下发量进行无人矿车控制,并反馈当前无人矿车的实际位置和实际速度。
7、作为本发明的进一步的方案:所述步骤s1中计算规划路径参考点的具体步骤包括:
8、获取当前无人矿车的时间t、定义的预瞄时间t1,以及规划路径的下发路线为trajectory_point;
9、利用二分搜索函数forwarditerator lower_bound(),以及返回路径点时间的时间小于当前时间的设置,即trajectory_point.time<t,先遍历轨迹查找出第一个满足添加的点,作为参考点reference_point,然后继续遍历所有轨迹点;
10、再根据reference_point.time-t1<t1-(trajectory_point-1).time查找出规划路径上最接近当前时间的轨迹点作为最终参考点。
11、其中,forwarditerator为迭代器。
12、作为本发明的进一步的方案:所述步骤s2中计算当前匹配路径点的具体步骤包括:
13、获取当前无人矿车的实际位置信息vehicle_state;
14、遍历所有轨迹点trajectory_point,将获得的轨迹点trajectory_point、实际位置横坐标vehicle_state.x,以及纵坐标vehicle_state.y,代入距离计算公式计算出最小值,得到当前的轨迹点为匹配的路径点,距离计算公式为:
15、l=(xt-x)2+(yt-y)2;
16、其中,(xt,yt)为t时刻的坐标。
17、作为本发明的进一步的方案:所述步骤s2中计算位置偏差值的具体步骤包括:
18、获取无人矿车当前的实时定位信息,以及规划决策下发的规划路径;
19、根据当前时间在规划路径上,查询其绝对时间与预设时间差值最小的轨迹点作为参考点,无人矿车当前位置在规划路径上匹配的点作为当前点,将参考点的累计距离减去当前点的累计距离,计算得到位置偏差值。
20、作为本发明的进一步的方案:所述步骤s3中计算速度偏差值的具体步骤包括:
21、获取无人矿车当前的实时定位信息,以及规划决策下发的规划路径;
22、根据当前时间在规划路径上,查询其绝对时间与预设时间差值最小的轨迹点作为参考点,将参考点速度减去无人矿车当前状态下的速度,计算出速度偏差值。
23、作为本发明的进一步的方案:所述步骤s4中计算油门值和制动值的具体步骤包括:
24、对位置偏差值设定位置限幅阈值,通过pid控制器计算出速度偏移量的值,再用速度偏移量加上速度偏差值,然后把计算出的值限制在一个范围作为速度控制和制动控制的输入值,根据输入值的大小用pid控制器进行分段计算;
25、当输入值较大时pid控制器控制参数中的比列值kp较大,积分值ki较小,微分值kd根据稳定调参,可以更快的达到目标值;
26、当输入值较小时pid控制器控制参数中的比列值kp较小,积分值ki较大,微分值kd根据稳定调参,缓慢达到目标值,再加上坡度补偿值,计算得到油门值和制动值后下发输出。
27、与现有技术相比,本发明存在以下技术效果:
28、采用上述的技术方案,通过根据车辆当前位置和当前速度与从参考点的位置和速度来实时计算两者的差值,通过pid控制计算出输出的油门和制动值,这样可以根据实际情况对车辆进行更好的纵向控制,也能提高控制精度;同时利用位置和速度信息的输入和输出形成闭环控制,排除外部干扰,有较强的抗干扰能力,能进行有效的控制,从而保证预定目标的实现,可以减少偏差,提高控制精度;以及利用pid的分段控制,可以更好的根据规划速度的大小控制加减速度,更加平稳的控制油门和制动的下发量,达到更好的车辆控制效果。
技术特征:
1.一种基于目标规划的无人矿车纵向分段pid控制方法,其特征在于,具体步骤包括:
2.根据权利要求1所述一种基于目标规划的无人矿车纵向分段pid控制方法,其特征在于,所述步骤s1中计算规划路径参考点的具体步骤包括:
3.根据权利要求1所述一种基于目标规划的无人矿车纵向分段pid控制方法,其特征在于,所述步骤s2中计算当前匹配路径点的具体步骤包括:
4.根据权利要求1所述一种基于目标规划的无人矿车纵向分段pid控制方法,其特征在于,所述步骤s2中计算位置偏差值的具体步骤包括:
5.根据权利要求1所述一种基于目标规划的无人矿车纵向分段pid控制方法,其特征在于,所述步骤s3中计算速度偏差值的具体步骤包括:
6.根据权利要求1所述一种基于目标规划的无人矿车纵向分段pid控制方法,其特征在于,所述步骤s4中计算油门值和制动值的具体步骤包括:
技术总结
本发明公开了一种基于目标规划的无人矿车纵向分段PID控制方法,包括获取车辆的实际位置和速度,以及规划位置和规划速度;根据实际位置和规划位置,计算得到位置偏差值,以及根据实际速度与规划速度,计算得到速度偏差值;根据得到的位置偏差值输入位置PID控制器计算出速度偏移量的值,同时利用得到的速度偏差值进行计算,得到最终的速度偏差值;将得到的最终的速度偏差值输入分段PID控制器进行计算,输出油门值和制动值的下发量进行无人矿车控制,并反馈当前无人矿车的实际位置和实际速度。本发明根据车辆当前位置和速度信息,与从参考点的位置和速度计算偏差值,再通过PID控制计算出油门值和制动值,从而实现对车辆进行更好的纵向控制,也能提高控制精度。
技术研发人员:石志豪,刘孟,周圣文
受保护的技术使用者:安徽海博智能科技有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!