一种无人车编队动态避障方法、系统及产品
本发明涉及无人车编队动态避障领域,特别是涉及一种无人车编队动态避障方法、系统及产品。
背景技术:
1、目前国内外对无人车编队问题的研究主要使用领航-跟随法、虚拟结构法、人工势场法、基于行为的控制方法等,在方法上侧重于无人车编队队形保持的精度和鲁棒性,以及队形的收敛速度等,尚缺乏对环境中障碍物等因素考虑,无人车编队灵活性较差。
2、其中,人工势场法是将无人车编队避障轨迹规划和无人车编队队形规划相结合。通过构造虚拟的势力场,包括障碍物对无人车的斥力场、无人车之间的作用力场(无人车间的作用力在小于安全距离时表现为斥力,在大于编队期望间距时表现为引力,实现维持无人车编队的期望队形)、目标点对无人车的引力场等,在引力场和斥力场的合作用力下,实现无人车在编队行进过程中的避障功能。该方法采用无人车编队分布式控制方法,将队形维持和编队避障共同表示在势场力函数中,但该算法存在局部极小值的缺陷,会导致机器人陷入“死点”。由于不考虑实际无人车的运动能力,无人车无法准确跟踪算法规划的路径。除此之外,无人车编队中各无人车在执行局部路径规划时优先执行避障算法,而不考虑编队的队形保持问题,导致无人车编队在避障过程中整体队形产生较大的偏差甚至解体,在通过障碍物后往往需要较大行驶代价恢复原有队形。
技术实现思路
1、本发明的目的是提供一种无人车编队动态避障方法、系统及产品,使整个无人车编队在自主避障的同时最大程度地保持编队行驶要求。
2、为实现上述目的,本发明提供了如下方案:
3、第一方面,本发明提供了一种无人车编队动态避障方法,所述避障方法包括:
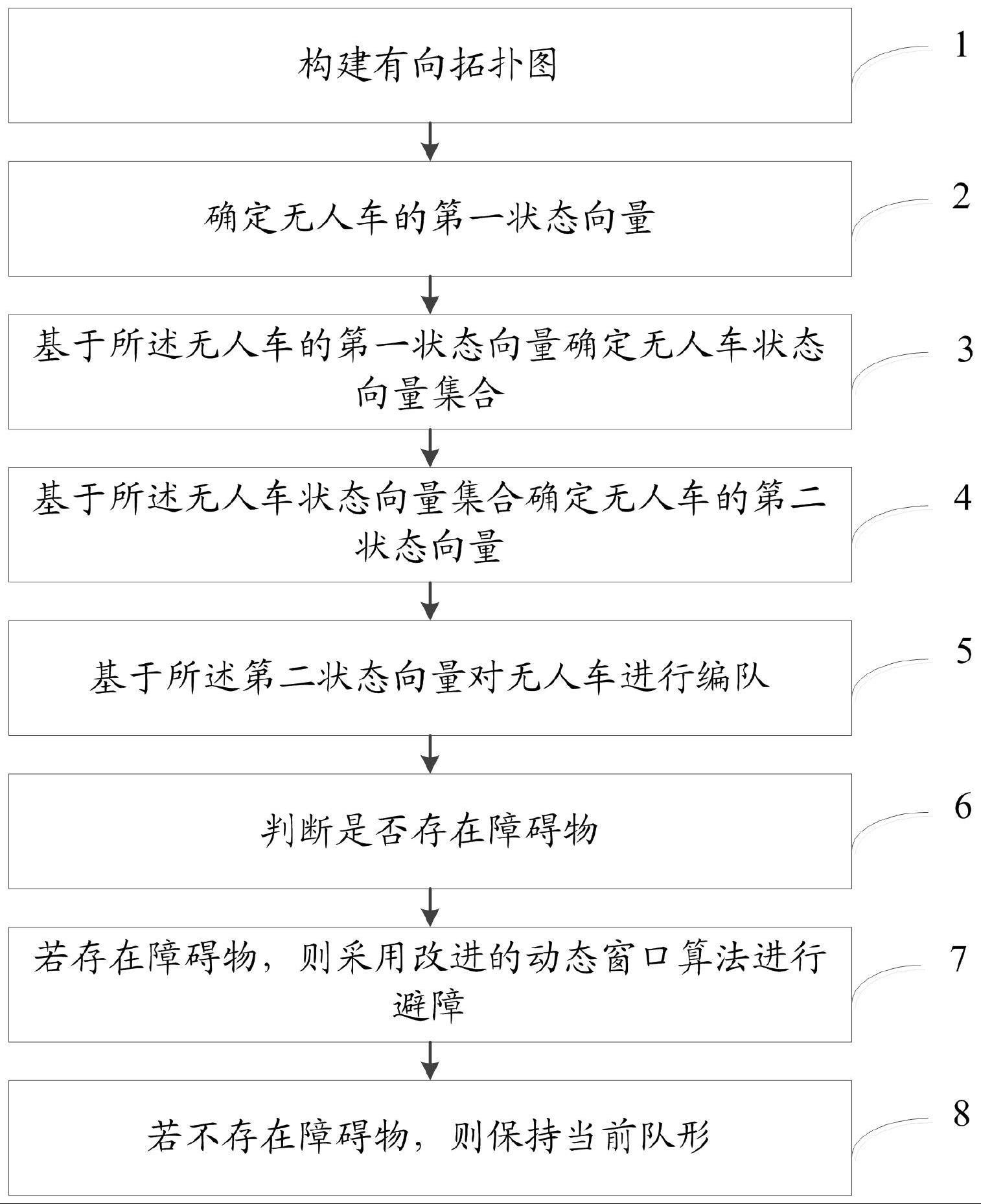
4、构建有向拓扑图所述有向拓扑图包括:以无人车为元素的n维顶点集合描述无人车之间的通信交互关系的边集以及邻接矩阵
5、确定无人车的第一状态向量;
6、基于所述无人车的第一状态向量确定无人车状态向量集合;
7、基于所述无人车状态向量集合确定无人车的第二状态向量;
8、基于所述第二状态向量对无人车进行编队;
9、判断是否存在障碍物;
10、若存在障碍物,则采用改进的动态窗口算法进行避障;
11、若不存在障碍物,则保持当前队形。
12、可选的,所述有向图的拉普拉斯矩阵为入度矩阵,中元素lij如下式计算得出:
13、
14、其中,表示n乘n维方阵,lij表示拉普拉斯矩阵i行j列元素,a表示邻接矩阵,aij表示邻接矩阵i行j列元素,di表示入度对角矩阵i行i列对角元素。
15、可选的,所述第一状态向量的表达式如下:
16、
17、其中,为无人车状态向量的一阶导信息,即ui,表示其控制输入;分别表示世界坐标系下x、y轴方向速度,表示世界坐标系下绕z轴方向角速度,θi表示无人车艏向角角度,vi为无人车身坐标系下前进方向速度,ωi为角速度,即
18、可选的,所述无人车状态向量集合的表达式如下:
19、
20、其中,是多智能体系统中的无人车状态向量集合,表示无人车状态向量集合的一阶导信息。
21、可选的,所述第二状态向量的表达式如下:
22、
23、其中,ui表示第i辆无人车算法输出速度向量,uj表示编队内主车j的速度向量,k1,k2为常数,xj表示主车j的状态向量,xi表示第i辆无人车的状态向量,xj*表示编队期望队形中主车j的状态向量,xi*表示编队期望队形中从车i的状态向量,aij表示邻接矩阵a第i行j列元素,表示无人车i的所有邻居节点的集合。
24、可选的,所述采用改进的动态窗口算法进行避障具体包括以下步骤:
25、确定无人车的动力学参数;
26、基于所述无人车的动力学参数对无人车当前的速度空间(vt,ωt)进行采样,形成动态窗口的速度取值空间;
27、基于所述动态窗口的速度取值空间确定动态窗口的安全速度取值空间;
28、基于所述动态窗口的安全速度取值空间和所述动态窗口的速度取值空间确定最终的速度取值空间;
29、确定改进后的动态窗口算法评价函数;
30、基于所述评价函数从所述最终的速度取值空间中确定最优速度组合;
31、将所述最优速度组合发送给无人车的底盘控制器进行实时运动规划。
32、可选的,所述最终的速度取值空间的表达式为:
33、v=vd∩vs
34、其中,vd表示动态窗口的速度取值空间,vs表示动态窗口的安全速度取值空间。
35、第二方面,基于本发明中的上述方法本发明另外提供一种无人车编队动态避障系统,所述避障系统包括:
36、有向拓扑图构建模块,用于构建有向拓扑图所述有向拓扑图包括:以无人车为元素的n维顶点集合描述无人车之间的通信交互关系的边集以及邻接矩阵
37、第一状态向量确定模块,用于确定无人车的第一状态向量;
38、无人车状态向量集合确定模块,用于基于所述无人车的第一状态向量确定无人车状态向量集合;
39、第二状态向量确定模块,用于基于所述无人车状态向量集合确定无人车的第二状态向量;
40、无人车编队模块,用于基于所述第二状态向量对无人车进行编队;
41、判断模块,用于判断是否存在障碍物;
42、避障模块,用于当存在障碍物时,则采用改进的动态窗口算法进行避障;
43、队形保持模块,用于当不存在障碍物时,则保持当前队形。
44、第三方面,本发明提供一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述的无人车编队动态避障方法。
45、第四方面,本发明提供一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现上述的无人车编队动态避障方法。
46、根据本发明提供的具体实施例,本发明公开了以下技术效果:
47、本发明中的动态窗口法是基于当前无人车状态和动力学性能的规划方法,可以规划出平滑、易于跟踪的轨迹,并且,使用人工势场法作为编队避障方法时,一些无人车可能陷入局部最优点,导致整个编队在避障过程中的队形偏差过大甚至解体,而本发明中将队形的虚拟目标点作为改进后的动态窗口法的目标输入,使无人车编队在完成避障动作时尽可能保持期望队形。
48、另外,将整个编队视为刚体的无人车编队避障方法,使整个编队以领航无人车作为参考中心,领航无人车为整个编队规划出避障路径,因此整个编队难以通过一些狭小或障碍物密集地形,各跟随无人车缺乏自主性。本发明中的各无人车同时执行避障算法,自主规划避障路径,可以通过一些障碍物密集地形。
技术特征:
1.一种无人车编队动态避障方法,其特征在于,所述避障方法包括:
2.根据权利要求1所述的无人车编队动态避障方法,其特征在于,所述有向图的拉普拉斯矩阵d为入度矩阵,中元素lij如下式计算得出:
3.根据权利要求1所述的无人车编队动态避障方法,其特征在于,所述第一状态向量的表达式如下:
4.根据权利要求2所述的无人车编队动态避障方法,其特征在于,所述无人车状态向量集合的表达式如下:
5.根据权利要求1所述的无人车编队动态避障方法,其特征在于,所述第二状态向量的表达式如下:
6.根据权利要求1所述的无人车编队动态避障方法,其特征在于,所述采用改进的动态窗口算法进行避障具体包括以下步骤:
7.根据权利要求6所述的无人车编队动态避障方法,其特征在于,所述最终的速度取值空间的表达式为:
8.一种无人车编队动态避障系统,其特征在于,所述避障系统包括:
9.一种电子设备,其特征在于,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行如权利要求1-7中任一项所述的无人车编队动态避障方法。
10.一种计算机可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1-7中任一项所述的无人车编队动态避障方法。
技术总结
本发明涉及一种无人车编队动态避障方法、系统及产品,属于无人车编队动态避障领域,避障方法包括:构建有向拓扑图确定无人车的第一状态向量;基于所述无人车的第一状态向量确定无人车状态向量集合;基于所述无人车状态向量集合确定无人车的第二状态向量;基于所述第二状态向量对无人车进行编队;判断是否存在障碍物;若存在障碍物,则采用改进的动态窗口算法进行避障;若不存在障碍物,则保持当前队形。本发明中的上述方法能够使整个无人车编队在自主避障的同时最大程度地保持编队行驶要求。
技术研发人员:罗均,佟川,蒲华燕,肖登宇,徐浪,王刚
受保护的技术使用者:重庆大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!