自适应海流来向的自主无人航行器遍历避障方法及装置与流程
本发明涉及水下路径规划,更具体的说是涉及一种自适应海流来向的自主无人航行器遍历避障搜索算法及装置。
背景技术:
1、海洋自主无人航行器(autonomous underwater vehicle,自主无人航行器)在海底地形测绘、水文信息搜集、反水雷等军民领域广泛应用。采用适当的遍历路径规划算法能有效解决作业任务区域覆盖搜索问题。但现有算法诸如基于种群超启发式算法,基于数据驱动或双向搜索的路径规划算法,都比较复杂,而且考虑到自主无人航行器自身的欠驱动特性,当其遭受水下洋流作用时,尤其为横流方向下,自主无人航行器跟踪路径的精度将大大降低。
2、为此,如何提出了一种能够自适应海流来向的简单的无人自主航行器遍历避障搜索算法,为搜索路径的高适航性和高可跟随性提供技术基础,是本领亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种自适应海流来向的自主无人航行器遍历避障搜索算法及装置,用于使自主无人航行器主要以与海流共线方式进行主规划,尽量减少横流方向路径长度,为搜索路径的高适航性和高可跟随性提供技术基础。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种自适应海流来向的自主无人航行器遍历避障方法,包括如下步骤:
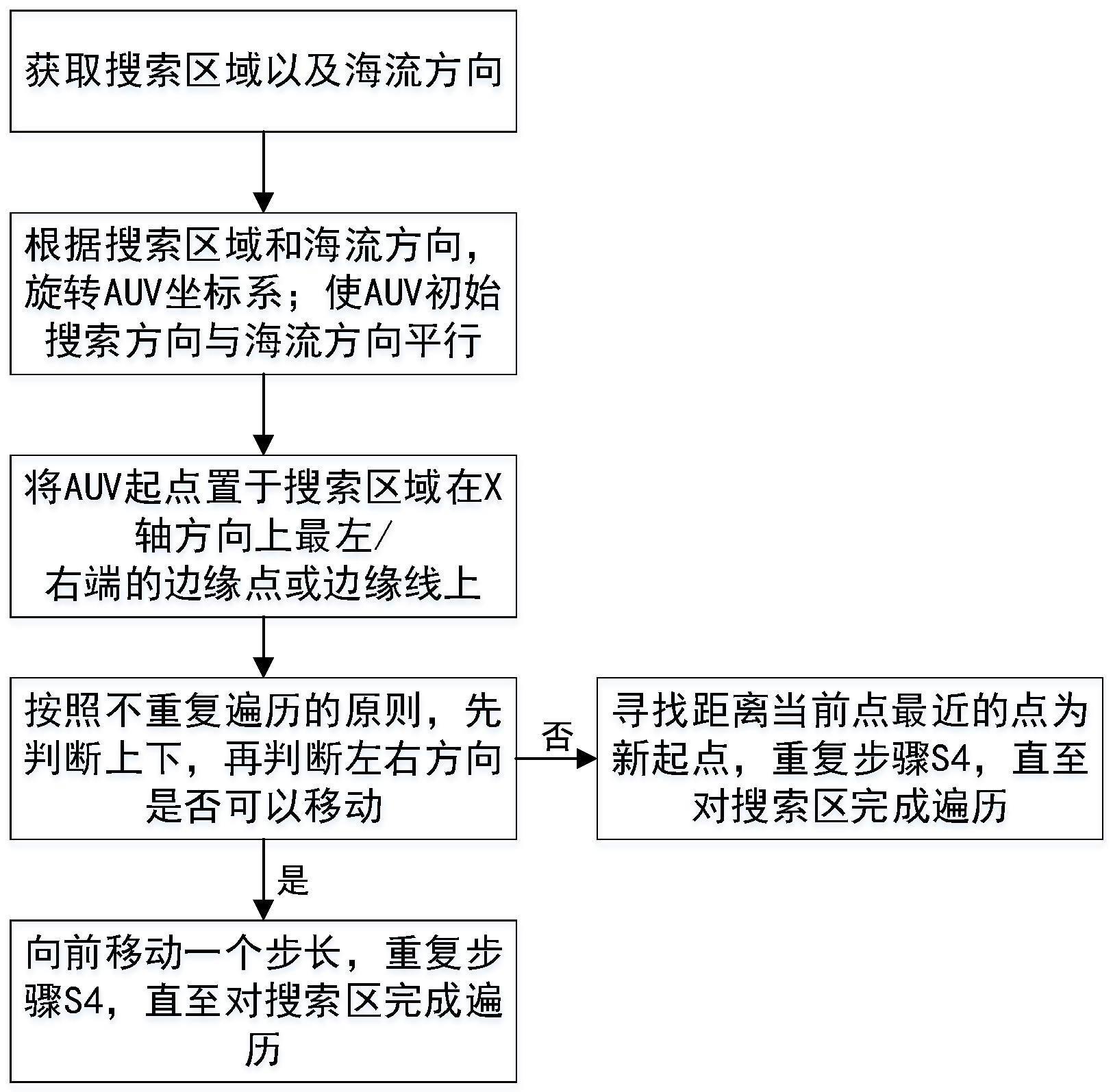
4、s1、获取搜索区域以及海流方向;
5、s2、根据所述搜索区域和所述海流方向,旋转自主无人航行器坐标系;使所述自主无人航行器初始搜索方向与所述海流方向平行;
6、s3、将所述自主无人航行器起点置于所述搜索区域在x轴方向上最左/右端的边缘点或边缘线上;
7、s4、按照不重复遍历的原则,依次判断上下和左右方向是否可以移动,
8、如是,向前移动一个步长,如否,寻找距离当前点最近的点为新起点;
9、s5、重复步骤s4,直至对所述搜索区完成遍历。
10、为进一步优化上述技术方案,步骤s1中,所述搜索区域中包括障碍区域时,若自主无人航行器起点位于所述搜索区域的最左端,判断顺序为左、上下/下上、右;若自主无人航行器起点位于所述搜索区域的最右端,判断顺序为右、上下/下上、左。
11、为进一步优化上述技术方案,遍历完成后,直接输出航路。
12、为进一步优化上述技术方案,步骤s4中,初始搜索方向为南/北,遍历时依次判断南北方向和东西方向是否可以移动。
13、另一方面,本发明提供了一种自适应海流来向的自主无人航行器遍历避障装置,其中所述装置包括:
14、数据获取模块,用于获取搜索区域以及海流方向;
15、坐标系转换模块,用于根据所述搜索区域和所述海流方向,旋转自主无人航行器坐标系;使所述自主无人航行器初始搜索方向与所述海流方向平行;
16、起点设置模块,用于将所述自主无人航行器起点置于所述搜索区域在x轴方向上最左/右端的边缘点或边缘线上;
17、路径遍历模块,用于按照不重复遍历的原则,先判断上下,再判断左右方向是否可以移动,如是,向前移动一个步长,如否,寻找距离当前点最近的点为新起点。
18、本发明还提供了一种电子设备,该电子设备包括处理器和存储器,所述存储器存储有能够被所述处理器执行的机器可执行指令,所述处理器执行所述机器可执行指令以实现如上所述的自适应海流来向的自主无人航行器遍历避障方法。
19、经由上述的技术方案可知,与现有技术相比,本申请首先对海流方向进行探测,并对搜索区和碍航区的边界进行坐标转换处理,然后利用公开的自适应海流来向的自主无人航行器遍历避障搜索算法进行自主无人航行器的航行路径规划,本发明公开的遍历方法可使自主无人航行器主要以与海流共线方式进行主规划,减少横流方向路径长度,从而提高跟踪路径的精度。
技术特征:
1.一种自适应海流来向的自主无人航行器遍历避障方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种自适应海流来向的自主无人航行器遍历避障方法,其特征在于,步骤s1中,所述搜索区域中包括障碍区域时,若自主无人航行器起点位于所述搜索区域的最左端,判断顺序为左、上下/下上、右;若自主无人航行器起点位于所述搜索区域的最右端,判断顺序为右、上下/下上、左。
3.根据权利要求1所述的一种自适应海流来向的自主无人航行器遍历避障方法,其特征在于,遍历完成后,直接输出航路。
4.根据权利要求1所述的一种自适应海流来向的自主无人航行器遍历避障方法,其特征在于,步骤s4中,初始搜索方向配置为南/北,遍历时依次判断南北方向和东西方向是否可以移动。
5.一种自适应海流来向的自主无人航行器遍历避障装置,其特征在于,所述装置包括:
6.一种电子设备,其特征在于,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的机器可执行指令,所述处理器执行所述机器可执行指令以实现权利要求1至4任一项所述的自适应海流来向的自主无人航行器遍历避障方法。
技术总结
本发明公开了一种自适应海流来向的自主无人航行器遍历避障方法及装置,属于路径规划领域,主要根据海流来向旋转坐标系,并将无人自主航行器的起点置于搜索区域在X轴方向上最左/右端的边缘点或边缘线上,依次判断上下以及左右方向是否可以移动,可以则向前移动一个步长,不可以则寻找距离当前点最近的点为新起点,继续遍历,直至遍历完整个搜索区域。本发明的路径规划方法可有效减少横流方向路径长度,提高路径规划精度。
技术研发人员:王琳琳,于双宁,李冀永,钟荣兴,韦一
受保护的技术使用者:中国船舶重工集团公司第七0七研究所九江分部
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!