一种用于吸水垫切块机的智能控制方法与流程
本发明涉及智能控制,具体涉及一种用于吸水垫切块机的智能控制方法。
背景技术:
1、医用吸水垫常用于的医用吸水产品,目前常用的医用吸水垫包括三种类型,三种类型的医用吸水垫分别采用医用脱脂纱布和医用脱脂棉经或者医用非织造布和高分子复合吸水纸作为加工原料,不同的使用场景对吸水垫的加工原料、尺寸、厚度等参数有着严格的要求和生产标准。
2、现阶段,吸水垫成型是通过切块机来实现的,由于吸水垫是由多层材料组成的,其中表层材料的厚度为毫米级,例如i型医用吸水垫成品的表面活性物质泡沫不得超过2毫米,这对切块机的机械装置和控制系统有着很高的精度要求。
3、切块机的控制系统中,控制刀具进出是关键环节,而步进电机作为切块机的驱动装置,控制着刀具进出的速度和时刻。由于步进电机启动时具有较大惯性,当负载冲击过大时,容易产生失步,导致原料损耗,且传统控制步进电机的方法,在作业场景对刀具速度不断变化的要求的适应性较低,因此实现对步进电机的智能控制,是降低损耗、提高切块精度和满足不同使用场景的不同需求的关键。
技术实现思路
1、本发明提供一种用于吸水垫切块机的智能控制方法,以解决现有的问题。
2、本发明的一种用于吸水垫切块机的智能控制方法采用如下技术方案:
3、本发明一个实施例提供了一种用于吸水垫切块机的智能控制方法,该方法包括以下步骤:
4、采集切块机的转速数据;
5、将adam优化算法中的第一衰减率和第二衰减率分别记为第一参数和第二参数,根据第一参数和第二参数设置寻优空间,在寻优空间的范围内随机生成预设数量个粒子;
6、在每次迭代时,调整粒子的惯性权重,实现对粒子群优化算法的改进,包括:根据粒子的行进速度计算粒子在每次迭代时的位置,根据粒子在每次迭代时的位置计算粒子的位置最佳选择系数,根据粒子的行进速度计算粒子的行进速率最佳选择系数;根据位置最佳选择系数和行进速率最佳选择系数,计算粒子的惯性权重;
7、根据改进的粒子群优化算法获得第一参数的最优解和第二参数的最优解,分别记为第一最优参数和第二最优参数,将第一最优参数和第二最优参数分别作为adam优化算法的第一衰减率和第二衰减率,根据adam优化算法训练神经网络;
8、将转速数据作为神经网络的输入数据,将神经网络的输出数据作为模糊pid控制器的调控参数,计算模糊pid控制器的输出结果,利用模糊pid控制器的输出结果,调节切块机步进电机的实时转速,进而实现对刀具进出的精准控制。
9、进一步地,所述根据第一参数和第二参数设置寻优空间,包括的具体步骤如下:
10、根据经验值获得第一参数的取值范围,记为第一预设范围,根据经验值获得第二参数的取值范围,记为第二预设范围;将第一参数作为寻优空间的横坐标,将第一预设范围作为寻优空间的横坐标的取值范围,将第二参数作为寻优空间的纵坐标,将第二预设范围作为寻优空间的纵坐标的取值范围。
11、进一步地,所述根据粒子的行进速度计算粒子在每次迭代时的位置,包括的具体步骤如下:
12、粒子在第t+1次迭代时的位置的计算公式为:
13、
14、式中,表示第i个粒子在第t+1次迭代时的第j参数值,表示第i个粒子在第t次迭代时的第j参数值,j=1,2,表示第i个粒子在第t+1次迭代时的横坐标,表示第i个粒子在第t+1次迭代时的纵坐标,表示第i个粒子在第t+1次迭代时在寻优空间中的位置,表示第i个粒子在第t次迭代时的横坐标,表示第i个粒子在第t次迭代时的纵坐标,表示第i个粒子在第t次迭代时在寻优空间中的位置;表示第i个粒子在第t+1次迭代时第j参数值的行进速度,表示第i个粒子在第t+1次迭代时的行进速度沿横轴的分速度,表示第i个粒子在第t+1次迭代时的行进速度沿纵轴的分速度。
15、进一步地,所述根据粒子在每次迭代时的位置计算粒子的位置最佳选择系数,包括的具体步骤如下:
16、粒子的位置最佳选择系数的具体计算公式为:
17、
18、式中,表示第i个粒子在第t次迭代时的位置最佳选择系数,表示在第t次迭代时第i个粒子的位置与第t次迭代的局部最优解的位置在寻优空间的欧式距离,表示前t-1次迭代中第i个粒子的位置与前第t-1次迭代的局部最优解的位置在寻优空间的欧式距离的最小值,表示前t-1次迭代中第i个粒子的位置与第t-1次迭代的局部最优解的位置在寻优空间的欧式距离的最大值,表示在第a次迭代时第i个粒子的位置与第a次迭代的局部最优解的位置在寻优空间的欧式距离,表示取最大值。
19、进一步地,所述根据粒子的行进速度计算粒子的行进速率最佳选择系数,包括的具体步骤如下:
20、粒子的行进速率最佳选择系数的具体计算公式为:
21、
22、式中,表示第i个粒子在第t次迭代时的行进速率最佳选择系数,表示第i个粒子在第t次迭代时第j参数值的行进速度,表示第i个粒子在第t次迭代时第j参数值的行进速度的信息熵,表示第i个粒子在第k次迭代时第j参数值的行进速度的信息熵。
23、进一步地,所述根据位置最佳选择系数和行进速率最佳选择系数,计算粒子的惯性权重,包括的具体步骤如下:
24、粒子的惯性权重的具体计算公式为:
25、
26、式中,表示第i个粒子在第t次迭代时的惯性权重,表示在第t次迭代时所有粒子的惯性权重的最大值,表示在第t次迭代时所有粒子的惯性权重的最小值,表示第i个粒子在第t次迭代时的位置最佳选择系数,表示第i个粒子在第t次迭代时的行进速率最佳选择系数。
27、进一步地,所述根据adam优化算法训练神经网络,包括的具体步骤如下:
28、设置bp神经网络的基础参数,将历史转速数据作为神经网路的训练数据,将历史转速数据对应的pid模糊控制器的调控参数、和作为标签,根据adam优化算法训练bp神经网络。
29、本发明的技术方案的有益效果是:pid模糊控制器的模糊推理不具备学习能力,计算吸水垫切块机这样复杂场景的输出数据的可信度不高,本发明在粒子群优化算法的寻优过程中,根据粒子的位置最佳选择系数和行进速率最佳选择系数调整惯性权重,改进粒子群优化算法,相较于人为设定adam优化算法中第一衰减率和第二衰减率这两个参数,根据改进的粒子群优化算法获得adam优化算法的第一衰减率和第二衰减率两个参数的最优解,根据优化后的adam优化算法进行神经网络的训练,避免神经网络的训练过程陷入局部最小值以及振荡的产生,提高神经网络的训练效果,利用具备学习能力的神经网络获取的调控参数的可信度更高,实现对步进电机的智能控制,满足作业场景中对刀具速度不断变化的要求,提高吸水垫的成品质量。
技术特征:
1.一种用于吸水垫切块机的智能控制方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的一种用于吸水垫切块机的智能控制方法,其特征在于,所述根据第一参数和第二参数设置寻优空间,包括的具体步骤如下:
3.根据权利要求1所述的一种用于吸水垫切块机的智能控制方法,其特征在于,所述根据粒子的行进速度计算粒子在每次迭代时的位置,包括的具体步骤如下:
4.根据权利要求1所述的一种用于吸水垫切块机的智能控制方法,其特征在于,所述根据粒子在每次迭代时的位置计算粒子的位置最佳选择系数,包括的具体步骤如下:
5.根据权利要求1所述的一种用于吸水垫切块机的智能控制方法,其特征在于,所述根据粒子的行进速度计算粒子的行进速率最佳选择系数,包括的具体步骤如下:
6.根据权利要求1所述的一种用于吸水垫切块机的智能控制方法,其特征在于,所述根据位置最佳选择系数和行进速率最佳选择系数,计算粒子的惯性权重,包括的具体步骤如下:
7.根据权利要求1所述的一种用于吸水垫切块机的智能控制方法,其特征在于,所述根据adam优化算法训练神经网络,包括的具体步骤如下:
技术总结
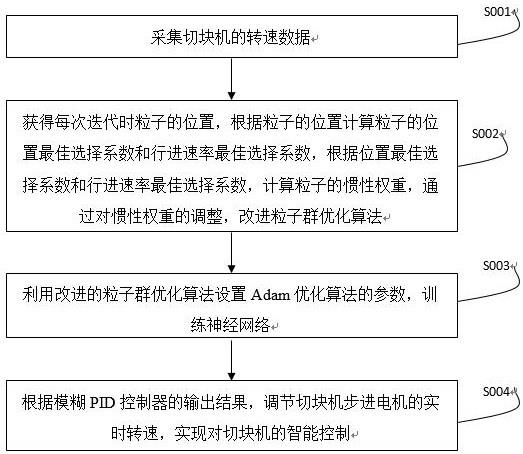
本发明涉及智能控制技术领域,具体涉及一种用于吸水垫切块机的智能控制方法,包括:采集切块机的转速数据,获得每次迭代时粒子的位置,根据粒子的位置计算粒子的位置最佳选择系数和行进速率最佳选择系数,根据位置最佳选择系数和行进速率最佳选择系数,计算粒子的惯性权重,通过对惯性权重的调整,改进粒子群优化算法,利用改进的粒子群优化算法设置Adam优化算法的参数,训练神经网络,将神经网络的输出结果作为模糊PID控制器的调控参数,根据模糊PID控制器的输出结果,调节切块机步进电机的实时转速,实现对切块机的智能控制。通过改进的粒子群优化算法获得Adam优化算法的两个参数,提高了神经网络的训练效果,实现了对步进电机的智能控制。
技术研发人员:谢海鹏,韩雪峰,张永飚
受保护的技术使用者:南通正德医疗科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!