控制装置、控制方法和计算机可读取记录介质与流程
本发明涉及一种控制装置、控制方法和计算机可读取记录介质。
背景技术:
1、近年来,提供对可持续运输系统的使用的努力变得活跃,这些系统也考虑了交通参与者中处于弱势地位的人。为了实现上述目的,正致力于通过与驾驶支持技术相关的研究开发而进一步改善交通的安全性、便利性的研究开发。
2、以往,已知用于使车辆自动移动并停放于指定的规定的停车位的自动停车控制。在专利文献1中记载了如下内容:能够通过手动输入而在预先确定的自动停车轨道中添加和删除障碍物,并确定通过手动操作而调节的自动停车轨道从而停放车辆。
3、现有技术文献
4、专利文献
5、专利文献1:国际公开第2017/028849号小册子
技术实现思路
1、发明要解决的课题
2、根据专利文献1,在用户识别出无法由传感器等检测的障碍物的情况下,能够计算出考虑了能够通过手动操作输入来添加的该障碍物的自动停车轨道。然而,即使在如自家的停车场、月租停车场那样将车辆停放于相同的停车位置的情况下,也必须每次对相同的障碍物进行手动操作输入,可能会对用户造成负担。因此,在驾驶支持技术中,关于这一点,在现有技术中存在改良的余地。
3、本发明的目的在于提供一种能够在将车辆停放于规定的停车位置时减轻用户的负担的控制装置、控制方法和计算机可读取记录介质。进而,其有助于可持续运输系统的发展。
4、用于解决课题的方案
5、本发明是一种控制装置,其是移动体的控制装置,其中,
6、所述控制装置具备:
7、接收部,其从所述移动体的用户接收障碍物位置的指定;以及
8、控制部,其基于所述用户指定的障碍物位置来进行用于将所述移动体停放于目标停车位置的停车控制,
9、所述控制部将所述障碍物位置作为指定障碍物位置,与所述目标停车位置相关联地进行登记。
10、本发明是一种控制方法,其中,
11、所述控制方法使移动体的控制装置进行如下处理:
12、从所述移动体的用户接收障碍物位置的指定;
13、基于所述用户指定的障碍物位置来进行用于将所述移动体停放于目标停车位置的停车控制;以及
14、将所述障碍物位置作为指定障碍物位置,与所述目标停车位置相关联地进行登记。
15、本发明是一种计算机可读取记录介质,其记录有控制程序,其中,
16、所述控制程序用于使移动体的控制装置的处理器执行如下处理:
17、从所述移动体的用户接收障碍物位置的指定;
18、根据所述用户指定的障碍物位置来进行用于将所述移动体停放于目标停车位置的停车控制;以及
19、将所述障碍物位置作为指定障碍物位置,与所述目标停车位置相关联地进行登记。
20、发明效果
21、根据本发明的控制装置、控制方法和计算机可读取记录介质,能够在将车辆停放于规定的停车位置时减轻用户的负担。
技术特征:
1.一种控制装置,其是移动体的控制装置,其中,
2.根据权利要求1所述的控制装置,其中,
3.根据权利要求1所述的控制装置,其中,
4.根据权利要求3所述的控制装置,其中,
5.根据权利要求3所述的控制装置,其中,
6.根据权利要求1所述的控制装置,其中,
7.根据权利要求1所述的控制装置,其中,
8.根据权利要求7所述的控制装置,其中,
9.根据权利要求1所述的控制装置,其中,
10.根据权利要求9所述的控制装置,其中,
11.根据权利要求9或10所述的控制装置,其中,
12.一种控制方法,其中,
13.一种计算机可读取记录介质,其记录有控制程序,其中,
技术总结
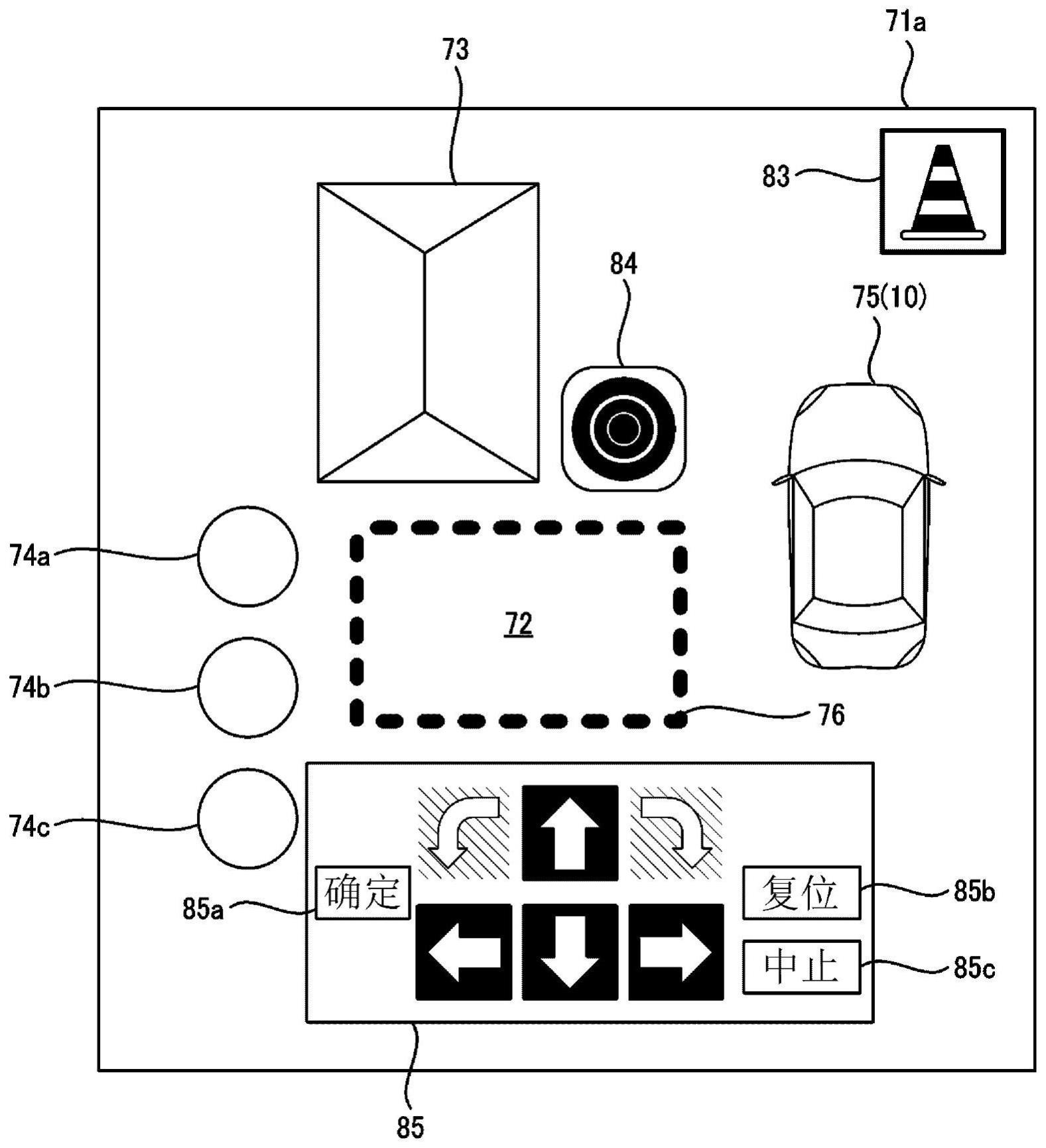
本发明提供一种能够在将车辆停放于规定的停车位置时减轻用户的负担的控制装置。用于控制车辆(10)的运算部(52)具备:接收部(56),其从车辆(10)的用户接收障碍物位置的指定;以及自动停车控制部(55),其基于用户指定的障碍物位置来进行用于将车辆(10)停放于目标停车位置(76)的停车控制。自动停车控制部(55)将障碍物位置(障碍物标识(84))作为指定障碍物位置,与目标停车位置(76)相关联地进行登记。
技术研发人员:中岛润之,藤原达朗,佐藤尧子,大和田水纪
受保护的技术使用者:本田技研工业株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!