基于机器人学习的机器人移动路径调整方法及相关装置与流程
本申请属于机器人智能控制,具体涉及一种基于机器人学习的机器人移动路径调整方法及相关装置。
背景技术:
1、目前,搬运机器人的移动控制方法为平台下发控制指令,搬运机器人本身通过同步定位与建图(simultaneous localization and mapping,slam)激光、读码相机识别二维来获取位置信息,并通过惯性测量单元(inertial measurement unit,imu)来进行惯量导航。搬运机器人每次移动控制都是独立控制,这种情况下,遇到一些打滑、凸起地面等可能重复发生的问题时,搬运机器人每次通过都会有一定程度的走偏,进而影响所述搬运机器人的移动精度和稳定性。
技术实现思路
1、本申请实施例提供了一种基于机器人学习的机器人移动路径调整方法及相关装置,以期减少期望位置与实际位置的偏差,提高机器人的行走精度。
2、第一方面,本申请实施例提供了一种基于机器人学习的机器人移动路径调整方法,应用于智能仓储系统中的机器人,所述智能仓储系统包括所述机器人和调度设备,所述调度设备与所述机器人通信连接;所述方法包括:
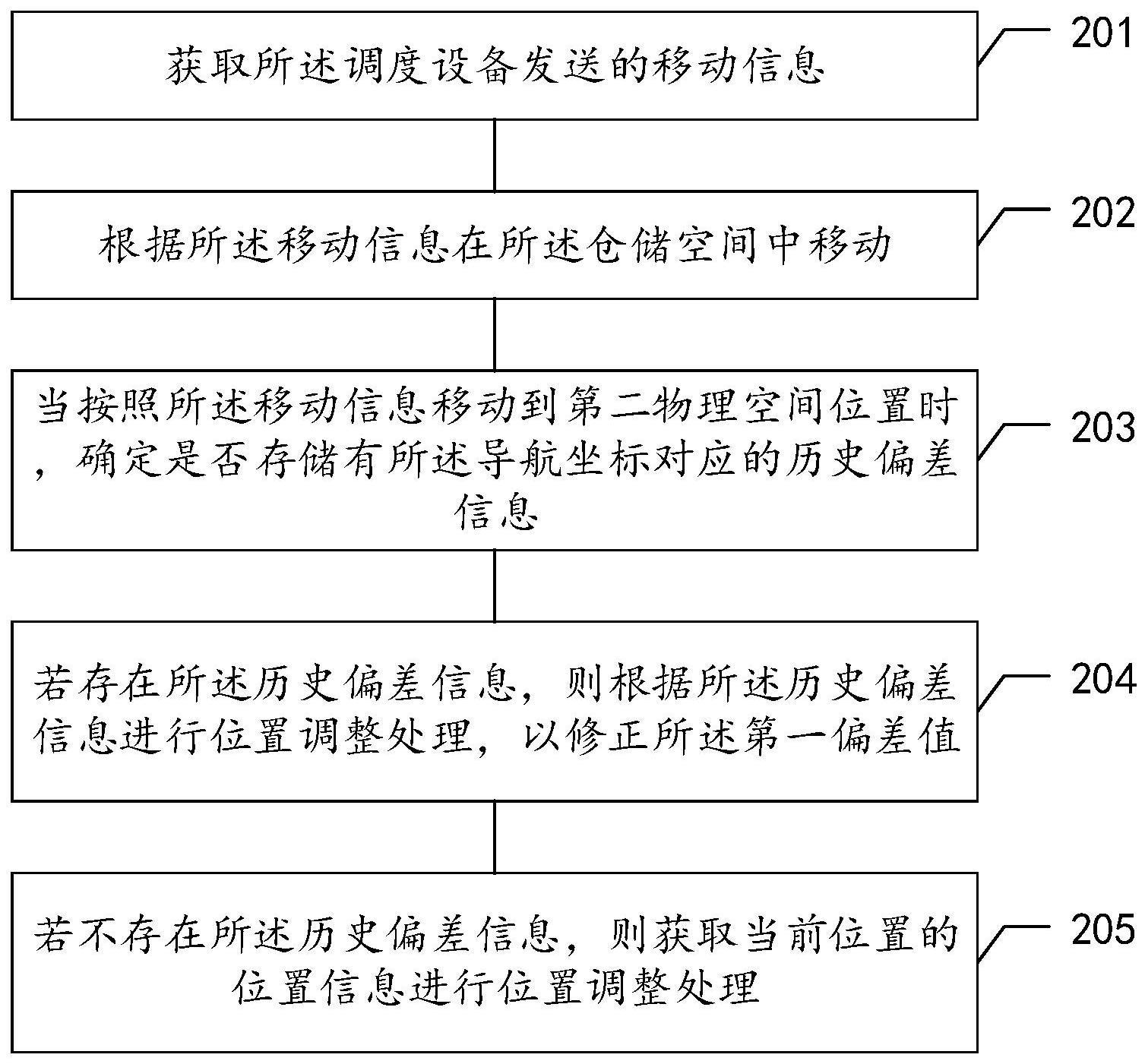
3、获取所述调度设备发送的移动信息,所述移动信息包括导航坐标,所述导航坐标用于指示仓储空间中的第一物理空间位置;
4、根据所述移动信息在所述仓储空间中移动;
5、当按照所述移动信息移动到第二物理空间位置时,确定是否存储有所述导航坐标对应的历史偏差信息,所述第二物理空间位置为所述机器人根据所述导航坐标的指示所移动到的实际的物理空间位置,所述历史偏差信息用于指示第二物理空间位置与所述第一物理空间位置的第一偏差值;
6、若存在所述历史偏差信息,则根据所述历史偏差信息进行位置调整处理,以修正所述第一偏差值;
7、若不存在所述历史偏差信息,则获取当前位置的位置信息进行位置调整处理。
8、第二方面,本申请实施例提供了一种基于机器人学习的机器人移动路径调整装置,应用于智能仓储系统中的机器人,所述智能仓储系统包括所述机器人和调度设备,所述调度设备与所述机器人通信连接;所述方法包括:
9、获取单元,用于获取所述调度设备发送的移动信息,所述移动信息包括导航坐标,所述导航坐标用于指示仓储空间中的第一物理空间位置;
10、移动单元,用于根据所述移动信息在所述仓储空间中移动;
11、确定单元,用于当按照所述移动信息移动到第二物理空间位置时,确定是否存储有所述导航坐标对应的历史偏差信息,所述第二物理空间位置为所述机器人根据所述导航坐标的指示所移动到的实际的物理空间位置,所述历史偏差信息用于指示第二物理空间位置与所述第一物理空间位置的第一偏差值;
12、第一调整单元,用于若存在所述历史偏差信息,则根据所述历史偏差信息进行位置调整处理,以修正所述第一偏差值;
13、第二调整单元,用于若不存在所述历史偏差信息,则获取当前位置的位置信息进行位置调整处理。
14、第三方面,本申请实施例提供了一种电子设备,包括处理器、存储器、通信接口,以及一个或多个程序,所述一个或多个程序被存储在所述存储器中,并且被配置由所述处理器执行,所述程序包括用于执行本申请实施例第一方面至第二方面中任一方面的步骤的指令。
15、第四方面,本申请实施例提供了一种计算机存储介质,存储用于电子数据交换的计算机程序,其中,所述计算机程序使得计算机执行如本实施例第一方面至第二方面中任一方面所描述的部分或全部步骤。
16、第五方面,本申请实施例提供了一种计算机程序产品,其中,上述计算机程序产品包括存储了计算机程序的非瞬时性计算机可读存储介质,上述计算机程序可操作来使计算机执行如本申请实施例第一方面至第二方面中任一方面所描述的部分或全部步骤。该计算机程序产品可以为一个软件安装包。
17、可以看出,本申请实施例中,首先获取调度设备发送的移动信息,移动信息包括用于指示仓储空间中的第一物理空间位置导航坐标;根据移动信息在仓储空间中移动;当按照移动信息移动到第二物理空间位置时,确定是否存储有导航坐标对应的历史偏差信息;若存在历史偏差信息,则根据历史偏差信息进行位置调整处理,以修正所述第一偏差值;若不存在历史偏差信息,则获取当前位置的位置信息进行位置调整处理。这样,减少期望位置与实际位置的偏差,提高机器人的行走精度。
技术特征:
1.一种基于机器人学习的机器人移动路径调整方法,其特征在于,应用于智能仓储系统中的机器人,所述智能仓储系统包括所述机器人和调度设备,所述调度设备与所述机器通信连接;所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取当前位置的位置信息进行位置调整处理,包括:
3.根据权利要求2所述的方法,其特征在于,所述机器人包括导航定位模块;所述在移动过程中获取当前位置的位置信息,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述位置信息与所述导航坐标确定并保存所述当前位置的第一偏差信息,包括:
5.根据权利要求2-4任一项所述的方法,其特征在于,所述根据所述第一偏差信息进行位置调整,包括:
6.根据权利要求1所述的方法,其特征在于,所述目标参数集合至少包括所述机器人的移动方向、移动速度和载重;
7.根据权利要求1所述的方法,其特征在于,所述根据所述历史偏差信息进行位置调整处理,以修正所述第一偏差值,包括:
8.一种基于机器人学习的机器人移动路径调整装置,其特征在于,应用于智能仓储系统中的机器人,所述智能仓储系统包括所述机器人和调度设备,所述调度设备与所述机器人通信连接;所述方法包括:
9.一种电子设备,其特征在于,包括处理器、存储器、通信接口,以及一个或多个程序,所述一个或多个程序被存储在所述存储器中,并且被配置由所述处理器执行,所述程序包括用于执行如权利要求1-7任一项所述的方法中的步骤的指令。
10.一种计算机可读存储介质,其特征在于,存储用于电子数据交换的计算机程序,其中,所述计算机程序使得计算机执行如权利要求1-7任一项所述的方法中的步骤的指令。
技术总结
本申请实施例提供了一种基于机器人学习的机器人移动路径调整方法及相关装置,应用于智能仓储系统中的机器人,智能仓储系统包括机器人和调度设备;方法包括:获取调度设备发送的移动信息,移动信息包括用于指示仓储空间中的第一物理空间位置导航坐标;根据移动信息在仓储空间中移动;当按照移动信息移动到第二物理空间位置时,确定是否存储有导航坐标对应的历史偏差信息;若存在历史偏差信息,则根据历史偏差信息进行位置调整处理,以修正所述第一偏差值;若不存在历史偏差信息,则获取当前位置的位置信息进行位置调整处理。这样,减少期望位置与实际位置的偏差,提高机器人的行走精度。
技术研发人员:袁横光
受保护的技术使用者:深圳市海柔创新科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!