基于三步法的智能汽车故障诊断与容错控制方法
本发明属于自动驾驶,尤其涉及基于三步法的智能汽车故障诊断与容错控制方法。
背景技术:
1、研究自动驾驶的意义是希望通过使用人工智能和机器学习技术,使汽车能够自主驾驶,从而提高行驶的安全性和效率。自动驾驶的研究有助于解决一些驾驶过程中的问题,例如驾驶员疲劳、操作失误、道路交通拥堵等。自动驾驶的技术可以在一定程度上消除驾驶员的影响,并且在遇到复杂的道路情况时,能够更快更准确地做出决策。此外,自动驾驶的研究还有助于推动汽车行业的技术进步,并有助于解决全球的环境问题,例如减少污染、减少能源消耗和改善城市交通状况。总的来说,自动驾驶不仅有助于提高驾驶安全和效率,而且还有助于促进汽车行业的技术进步,改善环境状况.
2、自动驾驶故障诊断与容错控制是自动驾驶技术的关键环节。自动驾驶故障诊断是指对自动驾驶技术的系统、硬件和软件进行诊断,以确定故障的原因,并进行修复或采取应急措施。这对于保证自动驾驶技术的安全性和可靠性至关重要。容错控制是指当自动驾驶技术遇到故障或异常情况时,采取相应的措施来确保车辆的安全。容错控制包括两个方面:一方面是避免故障发生;另一方面是在故障发生后采取应急措施。这对于保证自动驾驶技术的安全性和可靠性也至关重要。总的来说,自动驾驶故障诊断与容错控制是确保车辆自动驾驶技术安全性和可靠性的关键因素,对于提高自动驾驶技术的水平,具有十分重要的意义。
3、现有技术中,自动驾驶故障诊断与容错控制仍然具有以下的缺陷:
4、1、复杂的系统架构:自动驾驶技术系统架构复杂,包括传感器、计算机、控制器和激光雷达等多个部件,如何诊断故障并确定故障原因是一项挑战;
5、2、故障多样性:故障可以是由于硬件故障、软件故障、环境因素或人为因素等多种原因造成的,如何快速、准确地诊断出故障原因是难点;
6、3、容错技术不成熟:目前容错技术还不够成熟,难以应对复杂的故障情况,例如,当故障影响了多个系统时,如何确定应采取的应急措施仍然是个挑战;
7、4、数据处理难度:自动驾驶技术产生了大量的数据,如何快速、准确地处理这些数据以诊断故障并采取应急措施是一项难题。
技术实现思路
1、本发明实施例的目的在于提供基于三步法的智能汽车故障诊断与容错控制方法,旨在解决背景技术中提出的问题。
2、为实现上述目的,本发明实施例提供如下技术方案:
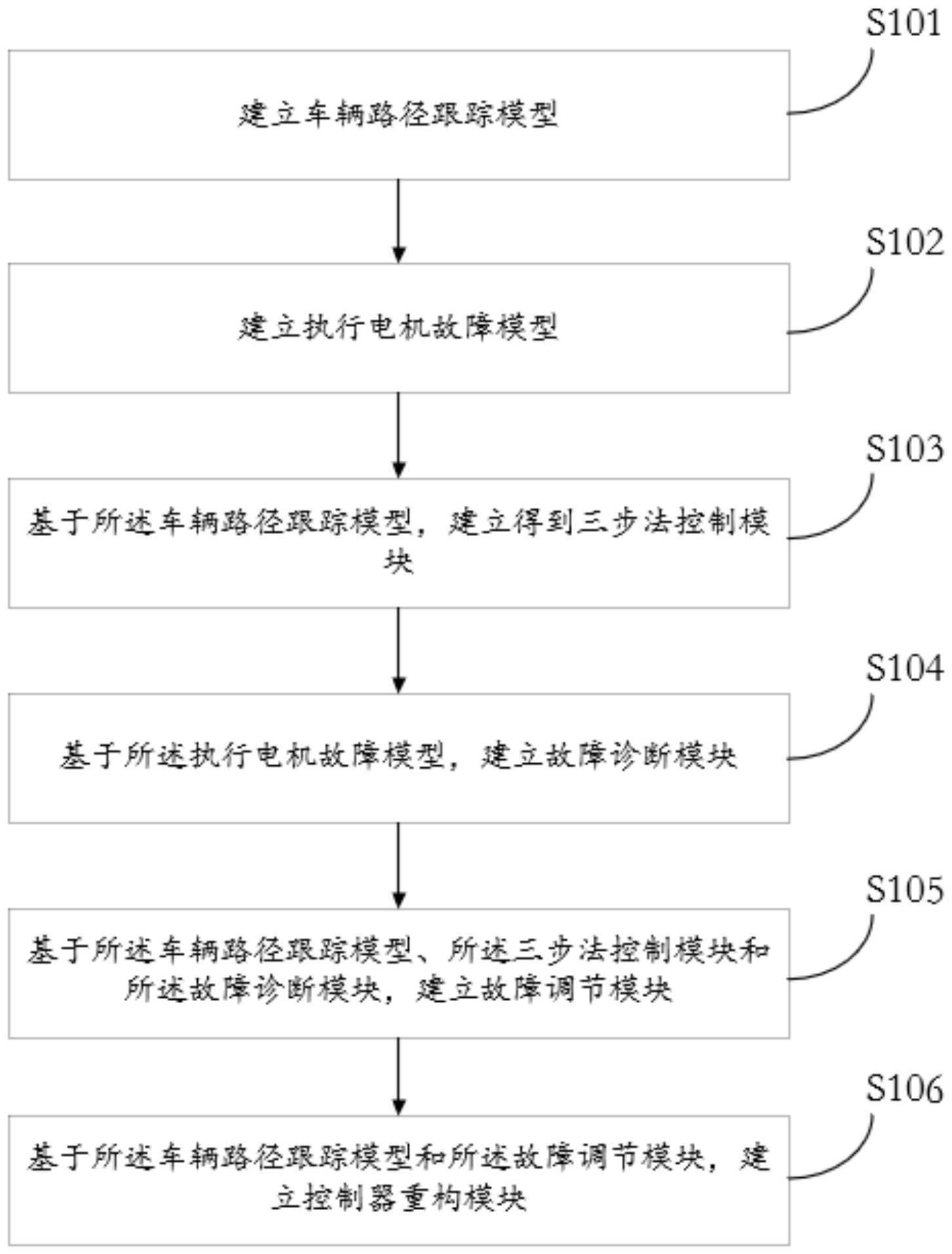
3、基于三步法的智能汽车故障诊断与容错控制方法,所述方法具体包括以下步骤:
4、建立车辆路径跟踪模型;
5、建立执行电机故障模型;
6、基于所述车辆路径跟踪模型,建立得到三步法控制模块;
7、基于所述执行电机故障模型,建立故障诊断模块;
8、基于所述车辆路径跟踪模型、所述三步法控制模块和所述故障诊断模块,建立故障调节模块;
9、基于所述车辆路径跟踪模型和所述故障调节模块,建立控制器重构模块。
10、作为本发明实施例技术方案进一步的限定,所述建立车辆路径跟踪模型表示为:
11、
12、式中,
13、
14、
15、
16、ω=[ωfl ωfr ωrl ωrr]t
17、
18、其中,车辆路径跟踪模型的状态x=[x1,x2]t=[vx,ωz]t,vx是车辆纵向速度,ωz是车辆横摆角速度,车辆路径跟踪模型的输入u=[tfl,tfr,trl,trr]t,tij分别表示左前轮(f1)、右前轮(fr)、左后轮(r1)和右后轮(rr)的电机力矩;
19、其中,vy是车辆侧向速度,mv是车辆质量,ca和cs是风阻系数,cf和cr是前后轮的刚度系数,lf和lr是前后轮到车辆中心的长度,δ是前轮转向角,iz是车辆转动惯量,re是轮胎有效半径,ls是左右轮间距,ωij分别表示左前轮(f1)、右前轮(fr)、左后轮(rl)和右后轮(rr)的角速度。
20、作为本发明实施例技术方案进一步的限定,所述电机故障模型表示为:
21、u=eu*
22、式中,u*是执行电机的期望输出力矩,e=diag([θ1θ2,θ3,θ4])是四个电机的有效系数,即θi∈[0,1],i={1,…,4}。
23、作为本发明实施例技术方案进一步的限定,所述基于所述车辆路径跟踪模型,建立得到三步法控制模块具体包括以下步骤:
24、基于所述车辆路径跟踪模型,建立稳态控制律
25、基于所述车辆路径跟踪模型,建立参考前馈控制律
26、基于所述车辆路径跟踪模型,建立误差反馈控制律
27、综合所述稳态控制律、所述参考前馈控制律和所述误差反馈控制律,建立三步法控制模块
28、作为本发明实施例技术方案进一步的限定,所述三步法控制模块表示为:
29、
30、作为本发明实施例技术方案进一步的限定,所述稳态控制律表示为:所述参考前馈控制律表示为:所述误差反馈控制律表示为:
31、作为本发明实施例技术方案进一步的限定,所述故障诊断模块表示为:
32、
33、式中,故障诊断模块对执行器故障的估计值,δ是诊断模型对故障的估计误差。
34、作为本发明实施例技术方案进一步的限定,所述故障调节模块表示为:
35、
36、
37、
38、式中,v*(k)是系统第kts时刻的虚拟控制量,是故障调节模块第kts时刻的虚拟控制量,ts是采样周期,ε是正数,i是单位矩阵,
39、作为本发明实施例技术方案进一步的限定,所述控制器重构模块表示为:
40、
41、与现有技术相比,本发明的有益效果是:
42、本发明实施例通过建立车辆路径跟踪模型;建立执行电机故障模型;建立三步法控制模块;建立故障诊断模块;建立故障调节模块;建立控制器重构模块。具有设计简单、逻辑概念清晰等特点,适用于智能汽车控制器设计,能够有效应用在自动驾驶车辆路径跟踪控制中,实现故障诊断与容错控制功能,且能够有效解决现有的自动驾驶故障诊断与容错控制面临的复杂的系统架构、故障多样性、容错技术不成熟和数据处理难度的问题。
技术特征:
1.基于三步法的智能汽车故障诊断与容错控制方法,其特征在于,所述方法具体包括以下步骤:
2.根据权利要求1所述的基于三步法的智能汽车故障诊断与容错控制方法,其特征在于,所述建立车辆路径跟踪模型表示为:
3.根据权利要求2所述的基于三步法的智能汽车故障诊断与容错控制方法,其特征在于,所述电机故障模型表示为:
4.根据权利要求3所述的基于三步法的智能汽车故障诊断与容错控制方法,其特征在于,所述基于所述车辆路径跟踪模型,建立得到三步法控制模块具体包括以下步骤:
5.根据权利要求4所述的基于三步法的智能汽车故障诊断与容错控制方法,其特征在于,所述三步法控制模块表示为:
6.根据权利要求4所述的基于三步法的智能汽车故障诊断与容错控制方法,其特征在于,所述稳态控制律表示为:所述参考前馈控制律表示为:所述误差反馈控制律表示为:
7.根据权利要求4所述的基于三步法的智能汽车故障诊断与容错控制方法,其特征在于,所述故障诊断模块表示为:
8.根据权利要求7所述的基于三步法的智能汽车故障诊断与容错控制方法,其特征在于,所述故障调节模块表示为:
9.根据权利要求8所述的基于三步法的智能汽车故障诊断与容错控制方法,其特征在于,所述控制器重构模块表示为:
技术总结
本发明涉及自动驾驶技术领域,具体公开了基于三步法的智能汽车故障诊断与容错控制方法。本发明通过建立车辆路径跟踪模型;建立执行电机故障模型;建立三步法控制模块;建立故障诊断模块;建立故障调节模块;建立控制器重构模块。具有设计简单、逻辑概念清晰等特点,适用于智能汽车控制器设计,能够有效应用在自动驾驶车辆路径跟踪控制中,实现故障诊断与容错控制功能,且能够有效解决现有的自动驾驶故障诊断与容错控制面临的复杂的系统架构、故障多样性、容错技术不成熟和数据处理难度的问题。
技术研发人员:王宇雷,张建伟
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!