一种基于载波通信控制的巡线无人机系统及其故障检测方法与流程
本方案涉及载波通信,具体涉及一种基于载波通信控制的巡线无人机系统及其故障检测方法。
背景技术:
1、输电线路有着广泛的分布,并且大多数处于比较恶劣的环境中,由于受到自然环境的影响较大,电线杆以及电力线受到持续的机械张力、大风雷电、风化和人为影响而发生损坏,如塔架倾倒、钢铰链断裂、磨损、腐蚀、应力等,因此必须要进行及时的更换和修复。此外,还存在遭雷击损坏、线路底部树木生长顶到线缆、杆塔被盗等事故,一旦发生这种情况要及时进行处理。传统的人工检查要耗费巨大的人力、物力和财力,特别在检查偏远地区以及跨江跨河的线路时,以及在大风、雨雪等极端恶劣的天气下,需要的人工时间等成本更大。
2、无人机实现了对巡线需求的完美契合,无人机巡线作业环境适应性强,准确性高。尤其在遇到电网经济故障和异常天气条件下,无人机弥补了线路巡检人员不具备的交通优势,普通观测仪器或肉眼巡检准确性低、效率低;无人机巡线比人工巡线效率高出40倍,采用无人机进行线路巡查,可降低劳动强度,提高维护和检修速度与效率,大大降低了成本;无人机具有巡线速度快、应急反应迅速、及时发现缺陷等优势,360°巡线弥补了人工作业时的视觉盲区,准确提供信息,避免造成事故和重大财产损失。
3、然而,常规巡线无人机的遥控距离通常为5km以内,或者使用gps坐标规划好路径的巡航模式。前者的主要缺点为异常天气或者自然灾害时仍需操作员跟随处于控制范围内,随优化了工作环境但仍需到现场;后者的缺点为巡航路径需提前设定好,中途添加临时任务较麻烦,且在一些山区等gps信号较弱的环境使用较为不便。
技术实现思路
1、为解决上述问题,本方案提供一种基于载波通信控制的巡线无人机系统及其故障检测方法,适用于对电力线路及附属设备的运行状态以及电力线路走廊周边环境状况及时和准确的巡视检测,通过排查发现故障点及危及电力安全的潜在隐患并进行有效排除,确保输电线路安全可靠运行,无需中途添加任务,使用便捷。
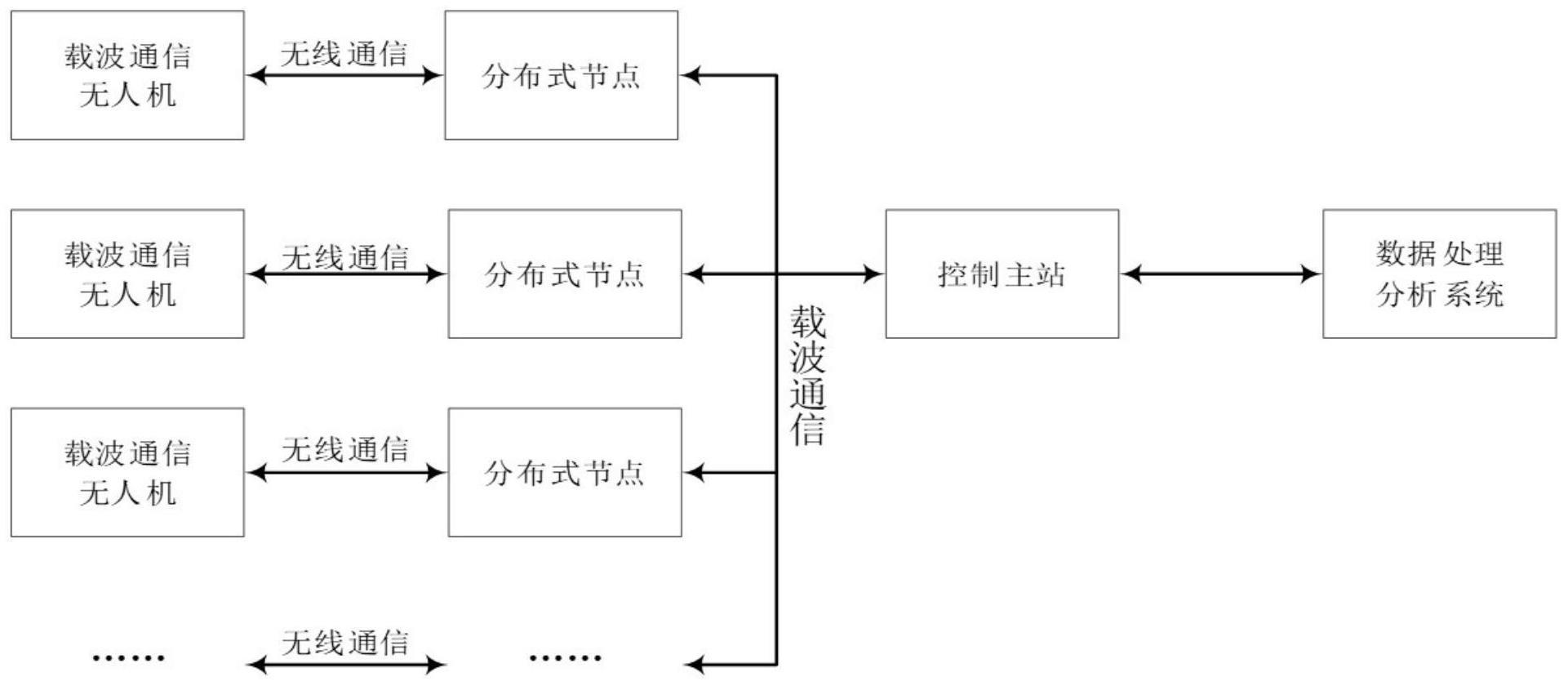
2、为实现上述目的,本发明提出了一种基于载波通信控制的巡线无人机系统,包含载波通信无人机、控制主站、控制节点、载波通信信道和数据处理分析系统;
3、所述载波通信无人机包括飞行平台、飞控模块、相机模块、通信模块;
4、所述控制主站发出控制信号,通过电力线载波通信传输至控制节点;
5、所述控制节点通过发送天线发送无线数据,无人机接收控制信号实现控制链路闭环,沿线路形成多个控制半径串行,使整条加装控制节点的电力线均可实现遥控功能。
6、所述载波通信信道和数据处理分析系统接收系统一方面接收自身探测可见光及激光雷达微数据,用于导线弧垂建模、点云生成分类、树障危险性分析和数据库对比补充,另一方面接收无人机经控制主站传回的线路信息,用于分析线路状态。
7、进一步的,所述飞行平台采用四旋翼无人机。
8、进一步的,所述载波通信无人机的飞控模块包含数据处理模块、数据解调模块和数据传输模块,数据处理模块用于对拍摄照片的点云化处理,安装有ros运动控制程序,通过避障运动控制算法、视觉识别算法、数据库比较算法,控制无人机的基本运动,数据解调模块用于采集数据的解调分析,数据传输模块将解调后的数据传输到数据处理模块进行处理。
9、进一步地,所述载波通信无人机的相机模块包含高精度变焦相机、变焦红外相机,高精度变焦相机用于查看被测设备细节,变焦红外相机用于查看被测设备温度,相机用于拍摄电力线,采集故障信息并通过载波通信模块发送给载波通信信道和数据处理分析系统。
10、进一步地,所述通信模块,将天线接收到的载波信号,通过数据解调还原为ros控制语言,使其能够被ros运动控制程序识别。
11、进一步地,所述将主站所发送的控制信号以载波通信的方式传输至各分布式节点上,再通过节点的天线以无线信号的形式发送给通信模块。
12、本发明还提出了一种基于载波通信控制的巡线无人机故障检测方法,包含以下步骤:
13、步骤1:载波通信无人机精细化巡线;
14、步骤2:载波通信无人机障碍物自主识别躲避;
15、步骤3:载波通信无人机实时采集线路状态图片并回传主站;
16、步骤4:图片点云处理。
17、进一步的,所述图片点云处理,是通过对杆塔及线路的多张照片点云化处理,结合图像识别算法对故障分类判断。
18、进一步的,所述图片点云处理通过是对比正常杆塔及线路数据库,分析故障及问题点,并将缺陷自动编码,输出故障报告。
19、本发明有益效果:本发明通过电力线与分布式节点结合传送载波控制信号,经由无人机平台识别处理,与机载智能控制相结合,能够实现主站遥控巡线全过程自动化进行,减小常规巡线所产生的的人力成本及在恶劣天气和自然灾害场景下的工程人员危险,同时基于无人机提供的全景图片可以更精确判断有无故障以及故障点,同时相比手动终端控制,其控制距离有了明显提升,实现线路全覆盖,且在山区环境无需依靠gps信号,通过飞控可实现自主避障,完成线路巡查工作。
技术特征:
1.一种基于载波通信控制的巡线无人机系统,包含载波通信无人机、控制主站、控制节点、载波通信信道和数据处理分析系统;
2.根据权利要求1所述的一种基于载波通信控制的巡线无人机系统,其特征在于,所述飞行平台采用四旋翼无人机。
3.根据权利要求1所述的一种基于载波通信控制的巡线无人机系统,其特征在于,所述载波通信无人机的飞控模块包含数据处理模块、数据解调模块和数据传输模块,数据处理模块用于对拍摄照片的点云化处理,安装有ros运动控制程序,通过避障运动控制算法、视觉识别算法、数据库比较算法,控制无人机的基本运动,数据解调模块用于采集数据的解调分析,数据传输模块将解调后的数据传输到数据处理模块进行处理。
4.根据权利要求1所述的一种基于载波通信控制的巡线无人机系统,其特征在于,所述载波通信无人机的相机模块包含高精度变焦相机、变焦红外相机,高精度变焦相机用于查看被测设备细节,变焦红外相机用于查看被测设备温度,相机用于拍摄电力线,采集故障信息并通过载波通信模块发送给载波通信信道和数据处理分析系统。
5.根据权利要求1所述的一种基于载波通信控制的巡线无人机系统,其特征在于,所述通信模块,将天线接收到的载波信号,通过数据解调还原为ros控制语言,使其能够被ros运动控制程序识别。
6.根据权利要求1所述的一种基于载波通信控制的巡线无人机系统,其特征在于,所述将主站所发送的控制信号以载波通信的方式传输至各分布式节点上,再通过节点的天线以无线信号的形式发送给通信模块。
7.一种基于载波通信控制的巡线无人机故障检测方法,包含以下步骤:
8.根据权利要求7所述的一种基于载波通信控制的巡线无人机故障检测方法,其特征在于,所述图片点云处理,是通过对杆塔及线路的多张照片点云化处理,结合图像识别算法对故障分类判断。
9.根据权利要求7所述的一种基于载波通信控制的巡线无人机故障检测方法,其特征在于,所述图片点云处理通过是对比正常杆塔及线路数据库,分析故障及问题点,并将缺陷自动编码,输出故障报告。
技术总结
本方案涉及载波通信技术领域,提供了一种基于载波通信控制的巡线无人机及其检测方法,主要通过载波通信系统搭配无人机飞行平台、数据处理分析系统,实现无人机巡线全过程。通过载波通信系统将控制信号发送至无人机飞行平台,在其搭载的飞控系统控制下实现飞行平台对线路巡查并采集数据,再经由载波通信系统发送回数据处理分析系统实现点云化处理,实现线路巡查的无人化、智能化,降低人工巡线产生的高成本及高危险性,并能应对极端天气环境及自然灾害下的线路检修工作。
技术研发人员:徐剑英,桑遥,韩德超,滕伟涛,刘文斌,闫庆鑫,商文涛,薄明
受保护的技术使用者:青岛鼎信通讯股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!