一种优化蚁群算法的移动机器人路径规划方法
本发明涉及机器人路径规划,具体是涉及一种优化蚁群算法的移动机器人路径规划方法。
背景技术:
1、路径规划是移动机器人研究领域的核心部分,路径规划是指在存在障碍物的环境中,寻找一条从起点到终点的最优或次优的无碰撞路径。在路径规划方法上分为传统算法与智能算法两类,传统算法包括rrt算法、a*算法、人工势场法等,智能算法包括蚁群算法、遗传算法、粒子群算法等。传统算法在路径规划上存在一定的局限性,而智能算法在计算时间、路径长度、安全性等方面优势明显,因此得到更加广泛的应用。
2、蚁群算法是意大利学者m.dorigo等人提出的一种模拟蚂蚁觅食的新型优化算法,该算法采用分布式计算、正反馈机制和启发式搜索,具有鲁棒性强、易于实现、全局搜索能力强等优点。但是该算法也存在收敛速度慢、效率低、容易陷入局部最优的缺点。
3、近年来,一些专家学者为了改善蚁群算法的缺点,提出了很多优化方法。如公开号为cn114355913a的专利申请公开了一种基于时空自适应双向蚁群算法的移动机器人路径规划方法,利用方向因子改进转移概率,动态调整算法相关参数,虽然提高了算法的收敛速度,但是路径中的转弯次数过多,路径不够平滑。又如公开号为cn112650229a的专利申请公开了一种基于改进蚁群算法的移动机器人路径规划方法,虽然引入a*算法和狼群算法改进启发式函数和信息素更新方式,增强了算法的全局搜索能力,但是几种算法的融合导致算法复杂,运算量大。李燕等人在期刊《南京信息工程大学学报(自然科学版)》发表的论文《基于改进蚁群算法的移动机器人路径规划方法》中提出一种通过优化信息素总量的改进蚁群算法,虽然增强了搜索的目的性,但是算法的收敛速度过慢。赵静等人在期刊《南京邮电大学学报(自然科学版)》发表的论文《基于改进蚁群算法的移动机器人路径规划》中提出一种通过构造新的启发式函数,改进挥发因子使其能够自适应变化的改进蚁群算法,虽然提高了算法的运算速度,但寻优得到的路径质量一般。
技术实现思路
1、发明目的:针对以上缺点,本发明提供一种增强搜索目的性的优化蚁群算法的移动机器人路径规划方法。
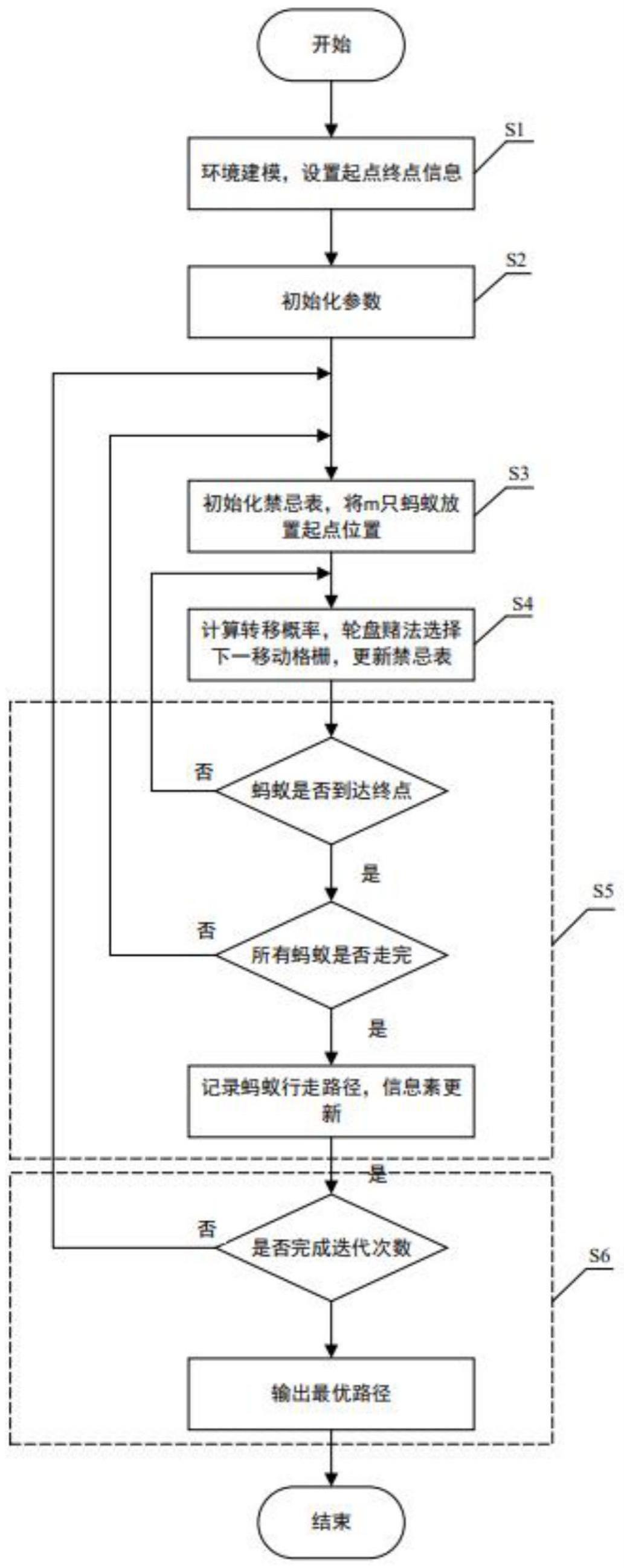
2、技术方案:为解决上述问题,本发明采用一种优化蚁群算法的移动机器人路径规划方法,包括以下步骤:
3、(1)采用格栅法建立环境模型,设置路径的起点、终点和障碍物信息;
4、(2)初始化蚁群算法的相关参数,对初始信息素进行非均匀分配,初始信息素分布公式:
5、
6、
7、其中,τ0为初始信息素值,dij为格栅节点i到格栅节点j之间的欧式距离,(xi,yi)为格栅节点i的坐标,(xj,yj)为格栅节点j的坐标,die为格栅节点i到终点格栅e之间的欧式距离,(xe,ye)为终点格栅e的坐标,dse为起点格栅s到终点格栅e的欧式距离,(xs,ys)为起点格栅s的坐标;
8、(3)初始化禁忌表,将m只蚂蚁放在起点位置上,并将起点格栅加入禁忌表中;
9、(4)根据启发式函数计算格栅转移概率,利用轮盘赌法确认下一移动格栅,并更新禁忌表;
10、(5)判断所有蚂蚁是否达到终点,若是,则记录蚂蚁行走路径,若否,则返回步骤(3),更新信息素;
11、(6)判断是否完成预设的迭代次数,若是,则输出最优路径,若否,则返回步骤(3)。
12、进一步的,所述步骤(2)中相关参数包括蚂蚁数量m,最大迭代次数nc_max,启发因子α,期望因子β,信息素挥发系数ρ,信息素强度系数q。所述信息素挥发系数ρ取值范围:
13、
14、其中,ρmin为信息素挥发系数最小值,nc_max为最大迭代次数,nc为当前迭代次数。
15、进一步的,所述步骤(4)中引入路程影响因素,得到新的启发式函数,如下所示:
16、
17、
18、
19、其中,为启发式函数,为路程影响因素启发函数,ξ为环境可调参数,γ、λ为校正系数,α为格栅边长,max和min表示节点i的相邻节点j到终点节点e的最大和最小距离,d(j,e)为节点j到节点e的欧式距离,allowedi为蚂蚁在节点i可选取的相邻节点集合。
20、进一步的,所述步骤(4)中栅格转移概率计算。公式为
21、
22、其中,为在t时刻第k只蚂蚁从节点i到节点j的转移概率,α为启发因子,β为期望因子,为启发式函数,τij(t)为节点i到节点j路径上的信息素浓度,allowedk为第k只蚂蚁在禁忌表外可移动的下一节点集合。
23、进一步的,所述步骤(5)中信息素更新公式为:
24、
25、
26、其中,τij(t+1)为更新后的信息素浓度,为第k只蚂蚁在节点i到节点j路径上的信息素增量,lk(t)为第k只蚂蚁在本次迭代中的路径长度,γk(t)为路径中的转弯次数,q为信息素强度系数,θ为常数。
27、进一步的,在更新信息素时,控制信息素浓度,利用最大最小蚂蚁算法方法,保证信息素浓度在[min,max]范围,具体为:
28、
29、其中,τij为信息素浓度,τmax为信息素浓度最大值,τmin为信息素浓度最小值。
30、有益效果:本发明相对于对比文献,其显著优点是通过对初始信息素进行差异化处理,改变以区域划分分配信息素的方法,使其与节点间的距离相关,增强算法初期搜索的目的性。通过构造新的启发式函数,改变传统算法中单一使用相邻节点间距离的倒数作为启发式函数的方法,引入路程影响因素和环境可调参数,增加搜索方向的引导性。通过改进信息素更新方式,利用最大最小蚂蚁算法在传统蚁群算法的基础上进行改进,设定信息素挥发系数范围,引入路径长度和转弯次数的权重影响,避免蚁群过早陷入局部最优,增强算法全局搜索能力。通过优化的蚁群算法可以使得算法收敛速度加快,转弯次数减少,在简单和复杂的环境中均可寻得较优路径,提升了算法在不同环境中的适应性。
技术特征:
1.一种优化蚁群算法的移动机器人路径规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的移动机器人路径规划方法,其特征在于,所述步骤(2)中相关参数包括蚂蚁数量m,最大迭代次数nc_max,启发因子α,期望因子β,信息素挥发系数ρ,信息素强度系数q。
3.根据权利要求2所述的移动机器人路径规划方法,其特征在于,所述信息素挥发系数ρ取值范围:
4.根据权利要求1所述的移动机器人路径规划方法,其特征在于,所述步骤(4)中引入路程影响因素,得到新的启发式函数,如下所示:
5.根据权利要求4所述的移动机器人路径规划方法,其特征在于,所述步骤(4)中栅格转移概率计算公式为
6.根据权利要求5所述的移动机器人路径规划方法,其特征在于,所述步骤(5)中信息素更新公式为:
7.根据权利要求6所述的移动机器人路径规划方法,其特征在于,在更新信息素时,控制信息素浓度,利用最大最小蚂蚁算法方法,保证信息素浓度在[min,max]范围,具体为:
8.根据权利要求1所述的移动机器人路径规划方法,其特征在于,所述步骤(1)采用格栅法建立环境模型,将所有栅格按照从下到上、从左到右的顺序依次编号,格栅坐标与格栅编号转换公式为:
9.一种移动机器人路径规划装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至8中任一项所述的移动机器人路径规划方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至8中任一项所述的移动机器人路径规划方法的步骤。
技术总结
本发明公开了一种优化蚁群算法的移动机器人路径规划方法,采用格栅法建立环境模型,设置路径的起点、终点和障碍物信息;初始化蚁群算法的相关参数,对初始信息素进行非均匀分配,初始化禁忌表,将只蚂蚁放在起点位置上,并将起点格栅加入禁忌表中;根据启发式函数计算格栅转移概率,利用轮盘赌法确认下一移动格栅,并更新禁忌表;判断所有蚂蚁是否达到终点,若是,则记录蚂蚁行走路径,若否,蚂蚁重新开始寻路,更新信息素;判断是否完成预设的迭代次数,若是,则输出最优路径,若否,蚂蚁重新开始寻路。通过对初始信息素进行差异化处理,改变以区域划分分配信息素的方法,使其与节点间的距离相关,增强算法初期搜索的目的性。
技术研发人员:崔永强,王黎辉,苏世杰
受保护的技术使用者:江苏科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!