一种基于无人机集群的广域大气污染实时监测方法
本发明涉及一种基于无人机集群的广域大气污染实时监测方法,属于无人机控制和大气污染监测领域。
背景技术:
1、环境污染问题日益严重,人们赖以生存的家园正在遭受环境污染的侵袭。环境污染中最常见的就是大气污染,在我们的工作和生活中大气污染无处不在,防不胜防,而且我们生活中的很多行为都会造成大气污染。随着我国工业化的快速发展,越来越多的制造型工厂投入到紧张的生产当中,这在一定程度上了增加了我国整体的废气排放量,对大气环境造成了严重的污染,在这种严峻的情势下,为了防止大气环境进一步恶化,需要我国相关治理部门加大环境整治力度,降低由于经济发展对大气环境所造成的污染程度。做好污染治理的第一步便是污染监测,只有高精度高效的监测才能促进污染治理。目前大气污染监测主要依赖设置的监测站点,其数量少,频率低,不足以提供高精度实时污染数据。
技术实现思路
1、针对上述现有技术存在的问题,本发明提供一种基于无人机集群的广域大气污染实时监测方法,本发明解决了当前大气污染监测结果滞后性强的问题,进一步增强了大气污染浓度监测结果的时效性。并且本发明适用范围广,使用环境多样,可以提供广域多类型污染物浓度实时监测结果,大大提升了传统大气污染监测的精度。
2、为了实现上述目的,本发明采用的技术方案是:一种基于无人机集群的广域大气污染实时监测方法,其特征在于,包括以下步骤:
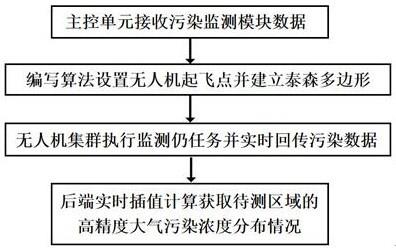
3、步骤s1: 主控单元(无人机地面站)增加大气污染监测模块接口,采用主控单元集中处理数据的方式,通过地面站统一调度控制无人机集群;
4、步骤s2: 根据待监测区域遥感影像进行无人机集群协同任务分工,采用泰森多边形分割监测区域,通过地面站设置飞行计划分配给集群中每一架无人机;
5、步骤s3: 无人机集群搭载大气污染监测仪器执行监测任务,实时回传各采样点各类别大气污染数据和位置信息;
6、步骤s4: 通过主控单元实时插值计算,在规定时间内获取待测区域的高精度大气污染浓度分布情况。
7、进一步的,所述步骤s1中还搭载有4g通讯模块,用于实现20km范围内的实时控制和通信。
8、进一步的,所述步骤s1中,大气污染监测设备要求尺寸小于标准范围:100 mm x100 mm x 50 mm,质量小于等于300g,其中采集数据所用的传感器测量频率大于等于1hz,并且可以将采集数据输出为json数据格式。
9、进一步的,所述步骤s2具体为:
10、s21:获取待测区域遥感影像数据,要求影像空间分辨率达到30m及以上;
11、s22:提取待测区域的roi(感兴趣区)样本,通过监督分类根据lcz(局部气候分区)规则,将监测样区分为17个基本类型,包含10个以建筑、厂房为主要地物的建成环境型(built types,lcz 1-10),7个以植被、水体为主要地物的自然环境型(land cover types,lcz a-g);
12、s23:根据lcz分类结果,为不同类型地区分配不同体量大小的无人机集群;根据不同区域平均飞行速度分配单个无人机监测范围:建成环境型每架次无人机承担不超过625m2采样区域,自然环境型每架次承担不超过900m2采样区域;
13、s24:根据测算的监测区域面积确定无人机集群数量,编写用于设置无人机起飞点的算法:根据监测区域lcz的类型设置小于无人机承担面积的圆形区域,不重叠的填充监测区域,根据圆形的数量与无人机数量的差异调整圆形区域大小,差异小于等于2时,以圆心作为无人机的起飞点;
14、s25:针对无人机集群如何合理协同执行任务的问题,考虑到监测范围地物类型多样,高程差异大,使用规则划分的方法可行性小,且飞行风险大;使用系统采样方法,通过无人机起飞点设置泰森多边形;
15、s26:使用voronoi图分割监测区域,以集群中每一个无人机位置作为各泰森多边形内的唯一点,便于无人机集群高效协同完成采集任务;
16、s27:主控单元(无人机地面站)将划分好的区域分配给集群中每一架无人机,设置相应的飞行计划。
17、进一步的,所述步骤s3具体为:
18、s31:使用前对无人机集群进行试飞,确保监测时通信模块可以正常回传实时数据;
19、s32:根据已经分配的监测任务,分别对集群中各无人机进行航迹规划;
20、s33:选择使用航向重叠度和旁向重叠度均较高的s型航线,并根据各采样区域的地理环境设置安全飞行速度;
21、s34:校准无人机集群搭载的大气污染监测模块,确保各模块在特定点监测数值相同;
22、s35:测试无人机旋翼启动与关闭时空气质量监测仪读数差异,综合集群内多组数据,剔除飞行测量时因为桨叶造成的气流扰动对实验数据的影响;
23、s36:实验人员第一视角实时观察无人机集群是否按照预设航线飞行,并及时纠正个别无人机飞行问题,手动修正飞行路线和速度。
24、s37:收集无人机的信息和环境信息,无人机负责数据的输入和输出,主控单元负责数据的存储和控制。
25、进一步的,所述步骤s4具体为:
26、s41:主控单元执行数据的存储和控制处理,实时计算无人机集群采集的信息;
27、s42:基于集群中无人机回传的位置信息和大气污染浓度数据,采用插值算法,得到监测区域高精度的实时污染浓度分布情况。
28、本发明的有益效果是:该方法利用了无人机集群多点布控和机动性强的特征,解决了当前监测站点数量少,监测精度低,覆盖范围小的问题,进一步增强了大气污染浓度监测结果的时效性。无人机集群采集实时多点大气污染数据,解决了因为飞行时间过长导致的数据不同步的问题,相较于单个无人机监测有较大的优势,污染监测更加精准。并且本发明适用范围广,使用环境多样,可以提供广域多类型污染物浓度实时监测结果,大大提升了广域大气污染监测的精度。
技术特征:
1.一种基于无人机集群的广域大气污染实时监测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于无人机集群的广域大气污染实时监测方法,其特征在于,所述步骤s1中还搭载有4g通讯模块,用于实现20km范围内的实时控制和通信。
3.根据权利要求1所述的一种基于无人机集群的广域大气污染实时监测方法,其特征在于,所述步骤s1中,大气污染监测设备要求尺寸小于标准范围:100 mm x 100 mm x 50mm,质量小于等于300g,其中采集数据所用的传感器测量频率大于等于1hz,并且可以将采集数据输出为json数据格式。
4.根据权利要求1所述的一种基于无人机集群的广域大气污染实时监测方法,其特征在于,所述步骤s2具体为:
5.根据权利要求1所述的一种基于无人机集群的广域大气污染实时监测方法,其特征在于,所述步骤s3具体为:
6.根据权利要求1所述的一种基于无人机集群的广域大气污染实时监测方法,其特征在于,所述步骤s4具体为:
技术总结
本发明公开一种基于无人机集群的广域大气污染实时监测方法,主控单元增加大气污染监测模块接口,通过地面站统一调度控制无人机集群;其次,根据待监测区域遥感影像进行无人机集群协同任务分工,采用泰森多边形分割监测区域,通过地面站设置飞行计划分配给集群中每一架无人机;再次,无人机集群搭载大气污染监测仪器执行监测任务,实时回传各采样点各类别大气污染数据和位置信息;最后,通过主控单元实时插值计算,在规定时间内获取监测区域的高精度大气污染浓度分布情况。该方法利用了无人机集群多点布控和机动性强的特征,解决了当前监测站点数量少,监测精度低,覆盖范围小的问题,进一步增强了大气污染浓度监测结果的时效性。
技术研发人员:冷宏骏,周侗,陶菲,李响,项益航,耿子良,陈皓喆
受保护的技术使用者:南通大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!