一种无人机集群的最优路径选择方法与流程
本发明涉及无人机集群路径规划,特别是一种无人机集群的最优路径选择方法。
背景技术:
1、单无人机任务规划,就是获取目标到任务完成的整个过程中,安排无人机在飞行过程中执行何种飞行任务以及如何实施这些飞行任务,使无人机生存概率和作业效能达到最佳。多无人机协同任务规划,除了需要考虑任务本身构成要素的要求外,还必须考虑多个无人机之间协调一致共同执行任务的约束关系,并根据任务规划指标为无人机设计出协同的飞行航路,使其整体作业效能最优或近似最优。先进的多无人机任务规划系统要求能够尽可能提高任务的整体执行效率,并且要求其反应速度快、运行效率高、具备实时运行能力,且能够处理大规模的无人机集群决策需求。
2、现有的无人机集群在路径规划时,面临各种复杂的任务和环境,难以在较短的时延内做出合适的策略。
3、因此,亟需一种无人机集群的最优路径选择方法,用于提高无人机集群的响应速度。
技术实现思路
1、本发明提供一种无人机集群的最优路径选择方法,用于解决背景技术中所述的,无人机集群在路径规划时,面临各种复杂的任务和环境,难以在较短的时延内做出合适的策略的技术问题。其具体技术方案如下:
2、第一方面啊,本发明提供一种无人机集群的最优路径选择方法,所述方法包括:
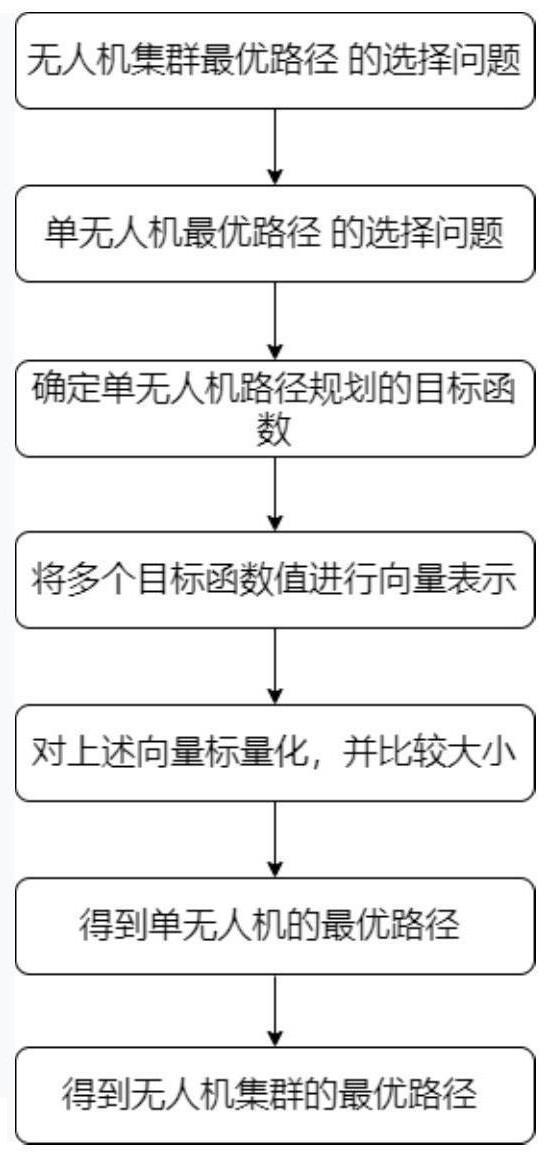
3、无人机集群中的每个无人机基于多目标函数的最优值和可行路径,确定单个无人机的局部最优路径;
4、所述无人机集群基于所述每个无人机的局部最优路径和环境奖励,确定所述无人机集群的最优路径,所述环境奖励为当前环境信息对单个无人机的实际执行的局部最优路径的修正因素。
5、本发明的另一种实施例中,在第一实施例的基础上,所述无人机集群中的每个无人机基于多目标函数的最优值和可行路径,确定单个无人机的局部最优路径,包括:
6、所述无人机集群中的每个无人机基于所述多目标函数确定所述多目标函数的最优值;
7、每个所述无人机基于外部环境信息和其他无人机的位置信息确定可行路径;
8、每个所述无人机基于所述最优值和所述可行路径,确定所述单个无人机的局部最优路径。
9、本发明的另一种实施例中,在第二实施例的基础上,所述多目标函数包括通常目标函数和额外目标函数;所述通常目标函数用于限定无人机飞行路径的基本需求,所述额外目标函数用于限定无人机飞行路径的额外任务需求,所述额外目标函数基于所述单个无人机的飞行任务确定。
10、本发明的另一种实施例中,在第三实施例的基础上,所述通常目标函数包括:平滑度惩罚、总时间惩罚、动态可行性惩罚。
11、本发明的另一种实施例中,在第三实施例的基础上,所述额外目标函数包括:形成预期惩罚、多视图跟踪惩罚、距离测量误差惩罚。
12、本发明的另一种实施例中,在第二实施例的基础上,所述每个所述无人机基于所述最优值和所述可行路径,确定所述单个无人机的局部最优路径,包括:
13、每个所述无人机基于所述最优值生成对应的目标向量;
14、每个所述无人机基于所述可行路径生成对应的当前向量;
15、每个所述无人机基于所述目标向量和所述当前向量之间的距离确定pearson相关系数函数;
16、每个所述无人机基于所述pearson相关系数函数确定所述单个无人机的局部最优路径。
17、本发明的另一种实施例中,在第六实施例的基础上,所述每个所述无人机基于所述目标向量和所述当前向量之间的距离确定pearson相关系数函数中,所述目标向量和所述当前向量之间的距离确定方法包括:线性加权法、chebyshev距离标量化法、mahalanobis距离标量化法、超体积度量标量化法、manhattan距离标量化法、余弦距离标量化法。
18、本发明的另一种实施例中,在第六实施例的基础上,所述每个所述无人机基于所述pearson相关系数函数确定所述单个无人机的局部最优路径,包括:
19、基于所述目标向量和所述当前向量之间的距离、所述pearson相关系数函数,确定pearson相关系数p,所述pearson相关系数p为有关所述目标向量和所述当前向量之间的距离的函数关系式;
20、所述局部最优路径为所述pearson相关系数p的最小值所对应的路径。
21、本发明的另一种实施例中,在第一实施例的基础上,所述无人机集群基于所述每个无人机的局部最优路径和环境奖励,确定所述无人机集群的最优路径,包括:
22、所述无人机集群基于所述无人机集群中的环境信息和所述无人机集群外部的环境信息生成多个环境奖励;
23、所述无人机集群将所述环境奖励发送至对应的单个无人机中,使得对应的单个无人机的局部最优路径进行调整;
24、所述无人机集群基于每个所述无人机调整后的局部最优路径,确定所述无人机集群的最优路径。
25、第二方面,本发明还提供一种无人机,所述无人机为无人机集群中的单个无人机,所述无人机中设置有上述第一方面中任一实施例所述的一种无人机集群的最优路径选择方法。
26、发明效果:
27、本发明提供一种无人机集群的最优路径选择方法,用于解决背景技术中所述的,现有无人机路径规划选择耗时较长的问题。本发明将原有的无人机集群的整体任务规划,改为单个无人机的任务规划。通过确定单个无人机的局部最优路径后,通过奖励机制,实现单个无人机的局部最优路径到整个无人机集群的最优路径的整合。加快了无人机路径规划的效率,降低了单个无人机的反应时间。同时,有效的将局部最优路径,很好的整合到无人机集群的最优路径。避免了无人机之间的干扰。
技术特征:
1.一种无人机集群的最优路径选择方法,其特征在于,所述方法包括:
2.如权利要求1所述的一种无人机集群的最优路径选择方法,其特征在于,所述无人机集群中的每个无人机基于多目标函数的最优值和可行路径,确定单个无人机的局部最优路径,包括:
3.如权利要求2所述的一种无人机集群的最优路径选择方法,其特征在于,所述多目标函数包括通常目标函数和额外目标函数;所述通常目标函数用于限定无人机飞行路径的基本需求,所述额外目标函数用于限定无人机飞行路径的额外任务需求,所述额外目标函数基于所述单个无人机的飞行任务确定。
4.如权利要求3所述的一种无人机集群的最优路径选择方法,其特征在于,所述通常目标函数包括:平滑度惩罚、总时间惩罚、动态可行性惩罚。
5.如权利要求3所述的一种无人机集群的最优路径选择方法,其特征在于,所述额外目标函数包括:形成预期惩罚、多视图跟踪惩罚、距离测量误差惩罚。
6.如权利要求2所述的一种无人机集群的最优路径选择方法,其特征在于,所述每个所述无人机基于所述最优值和所述可行路径,确定所述单个无人机的局部最优路径,包括:
7.如权利要求6所述的一种无人机集群的最优路径选择方法,其特征在于,所述每个所述无人机基于所述目标向量和所述当前向量之间的距离确定pearson相关系数函数中,所述目标向量和所述当前向量之间的距离确定方法包括:线性加权法、chebyshev距离标量化法、mahalanobis距离标量化法、超体积度量标量化法、manhattan距离标量化法、余弦距离标量化法。
8.如权利要求6所述的一种无人机集群的最优路径选择方法,其特征在于,所述每个所述无人机基于所述pearson相关系数函数确定所述单个无人机的局部最优路径,包括:
9.如权利要求1所述的一种无人机集群的最优路径选择方法,其特征在于,所述无人机集群基于所述每个无人机的局部最优路径和环境奖励,确定所述无人机集群的最优路径,包括:
10.一种无人机,所述无人机为无人机集群中的单个无人机,其特征在于,所述无人机的控制系统中设置有如权利要求1~9任一权利要求所述的一种无人机集群的最优路径选择方法。
技术总结
本发明提供了一种无人机集群的最优路径选择方法,该方法通过多目标函数确定单个无人机的局部最优路径,并通过获取每个无人机的局部最优路径,确定整个无人机集群的最优路径。通过这种方法在保证单个无人机与整体的无人机集群的必要的联系的同时,尽量保障单个无人机的独立运行,避免了无人机复杂的路径规划方法,加快了无人机的响应速度。
技术研发人员:刘韡,马俊杰,苏帅,姜瀚
受保护的技术使用者:航天科工网络信息发展有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!