自行走设备的远程运维系统、方法、装置和自行走设备与流程
本申请涉及远程遥控,具体涉及一种自行走设备的远程运维系统、方法、装置和自行走设备。
背景技术:
1、智能设备尤其是自行走设备在实际使用中,需技术人员现场安装调试,配置参数,构建地图,耗时费力,客户体验差。后续使用过程中场景复杂且环境易变,易发生技术故障,需要及时更新,远程管理及维护。
2、当前新兴的人工智能算法,对硬件要求越来越高,导致机器人硬件成本高。当前机器安装不仅需要安装硬件,还需要技术人员现场配置软件参数,构建地图,并进行相应调试,对安装人员要求高,费时费力。也有通过远程的方式进行运维,其主要通过这两种方式实现:
3、a,工程师需要去现场,通过连接设备,通过局域网访问设备,查看日志,修改程序代码和相关参数,实现对设备的维护。该方式下,需要工程师前往设备现场,显然维护成本高,及时性差。
4、b,搭建后台服务器,机器运行过程中的日志实时上传给后台,通过查看日志,分析设备状态和问题原因,然后再通过服务器后台远程更新设备程序。该方式下日志包含信息相对较少,分析困难,很难自由的查看所有设备节点信息。由于机器人由多个设备组成,需要为其编写相应的数据传输协议和和数据接口,增加额外工作量。
5、因此需要一种新的自行走设备设备的远程安装、运维方法。
技术实现思路
1、本申请的目的在于提供一种自行走设备的远程运维系统、方法、装置和自行走设备,以解决现有技术中机器人的维护管理、安装调试等都需要运维人员去现场处理,及时性较差的问题。
2、本申请的目的是通过以下技术方案实现:
3、本申请的第一方面,提供一种自行走设备的远程运维系统,包括:
4、安装于自行走设备的第一控制模块和远程设置的后台运维终端;
5、所述第一控制模块包括通信模块,所述后台运维终端通过所述通信模块与所述第一控制模块桥接,以形成虚拟局域网;
6、所述后台运维终端用于通过所述虚拟局域网获得所述第一控制模块预设的控制权限,远程访问控制所述自行走设备。
7、进一步地,根据本申请第一方面实施例提供的所述的远程运维系统,所述通信模块通过有线网络或无线网络连接外网,所述后台运维终端通过公网与所述通信模块建立网络连接。
8、第二方面,提供一种自行走设备的远程运维方法,应用于远程设置的后台运维终端,所述远程运维方法包括:
9、与自行走设备上安装的通信模块建立网络连接,形成虚拟局域网;
10、通过所述虚拟局域网获得第一控制模块预设的控制权限,远程访问控制所述自行走设备。
11、进一步地,根据本申请第二方面实施例提供所述的远程运维方法,所述通过所述虚拟局域网获得第一控制模块预设的控制权限,远程访问所述自行走设备之后,还包括:
12、断开与所述第一控制模块的网络连接,解除获得的所述控制权限。
13、进一步地,根据本申请第二方面实施例提供所述的远程运维方法,所述远程访问控制所述自行走设备,包括以下的至少一种或多种:
14、获取自行走设备的数据信息;
15、对所述自行走设备的调试、安装和维护管理;
16、监视所述自行走设备的状态。
17、进一步地,根据本申请第二方面实施例提供所述的远程运维方法,所述自行走设备的信息至少包括:所述自行走设备的状态数据、位置数据、任务数据、实时数据、历史数据或传感器数据中的一种或多种的组合。
18、第三方面,提供一种自行走设备的远程运维装置,包括:
19、局域网构建模块,用于与自行走设备上安装的通信模块建立网络连接,形成虚拟局域网;
20、权限获得模块,用于通过所述虚拟局域网获得第一控制模块预设的控制权限,远程访问控制所述自行走设备。
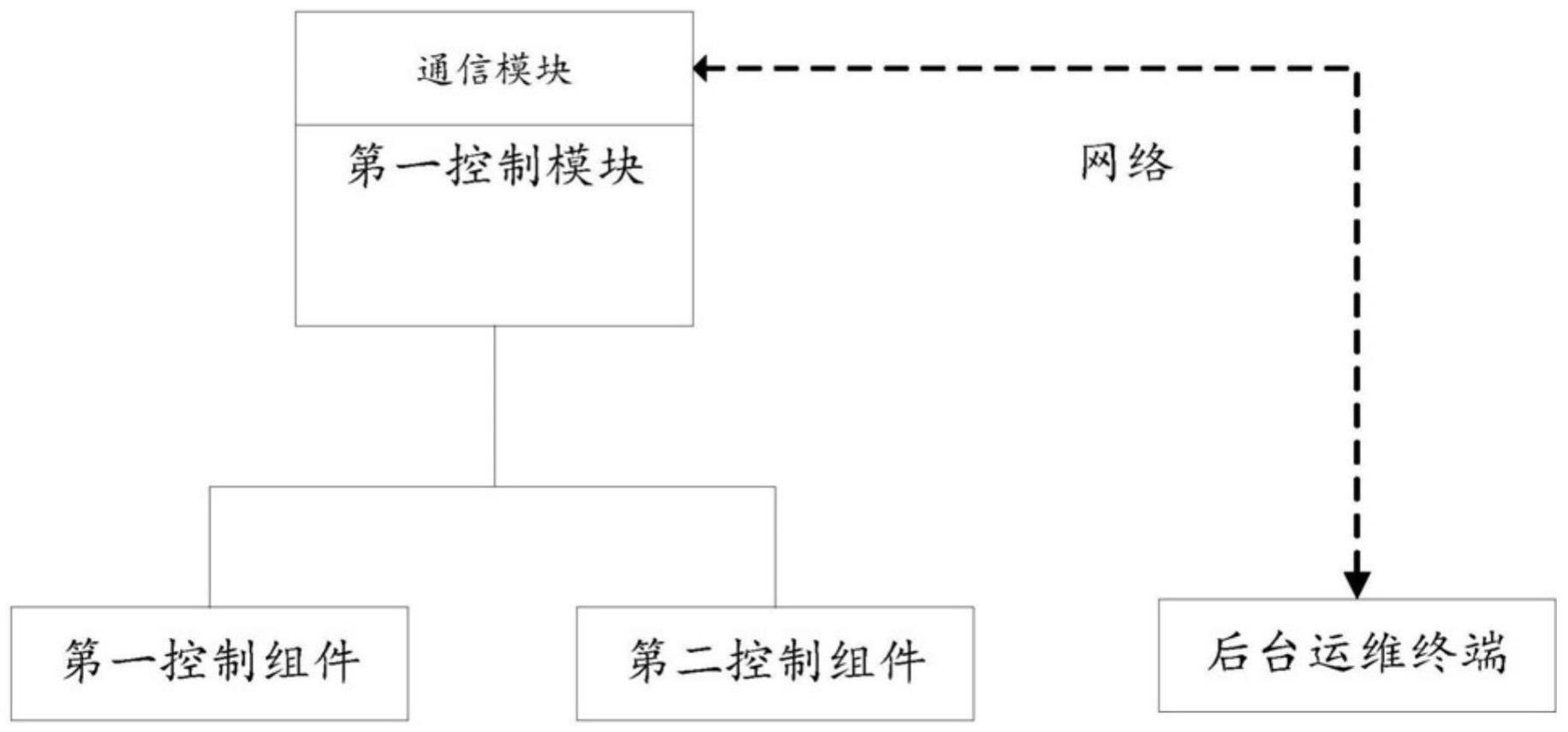
21、第四方面,提供一种自行走设备,包括第一控制模块和第二控制模块,所述第一控制模块包括通信模块;
22、所述通信模块用于连接外网,并用于与远程设置的后台运维终端网络连接,形成虚拟局域网;
23、所述虚拟局域网用于所述后台运维终端与所述通信模块连接后,获得所述第一控制模块的控制权限,远程访问控制所述自行走设备;
24、所述第二控制模块用于接收并响应所述第一控制模块的指令或后台运维终端的指令,以控制所述自行走设备。
25、进一步地,根据本申请第四方面实施例提供的自行走设备,所述第二控制模块包括第一控制组件和第二控制组件,所述第一控制组件和所述第二控制组件分别连接所述第一控制模块。
26、第五方面,提供一种电子设备,包括处理器和存储器,其中,所述存储器中存储有计算机程序,所述计算机程序在被处理器执行时,用以实现本申请第二方面任一实施例所述方法的步骤
27、本申请实施例达到的有益效果:本申请提出的远程运维系统中,后台运维终端能够实现以局域网的方式访问异地机器人设备,无需额外复杂操作,即可监视机器人状态,获取机器人运行数据,快速更新机器人配置,升级程序。本申请的控制方法后台运维终端操作人员具有充分的权限对第一控制模块和/或第二控制模块进行调试,这样无需额外复杂操作,即可监视机器人状态,获取机器人运行数据,进行快速更新机器人配置,升级程序。
技术特征:
1.一种自行走设备的远程运维系统,其特征在于,包括:
2.根据权利要求1所述的远程运维系统,其特征在于,所述通信模块通过有线网络或无线网络连接外网,所述后台运维终端通过公网与所述通信模块建立网络连接。
3.一种自行走设备的远程运维方法,其特征在于,应用于远程设置的后台运维终端,所述远程运维方法包括:
4.根据权利要求3所述的远程运维方法,其特征在于,所述通过所述虚拟局域网获得第一控制模块预设的控制权限,远程访问所述自行走设备之后,还包括:
5.根据权利要求3所述的远程运维方法,其特征在于,所述远程访问控制所述自行走设备,包括以下的至少一种或多种:
6.根据权利要求5所述的远程运维方法,其特征在于,所述自行走设备的信息至少包括:所述自行走设备的状态数据、位置数据、任务数据、实时数据、历史数据或传感器数据中的一种或多种的组合。
7.一种自行走设备的远程运维装置,其特征在于,包括:
8.一种自行走设备,其特征在于,包括第一控制模块和第二控制模块,所述第一控制模块包括通信模块;
9.根据权利要求8所述的自行走设备,其特征在于,所述第二控制模块包括第一控制组件和第二控制组件,所述第一控制组件和所述第二控制组件分别连接所述第一控制模块。
10.一种电子设备,其特征在于,包括处理器和存储器,其中,所述存储器中存储有计算机程序,所述计算机程序在被处理器执行时,用以实现权利要求3-6任一项所述方法的步骤。
技术总结
本申请涉及自行走设备的远程运维系统、方法、装置和自行走设备,其中,远程运维系统包括安装于自行走设备的第一控制模块和远程设置的后台运维终端;所述第一控制模块包括通信模块,所述后台运维终端通过所述通信模块与所述第一控制模块桥接,以形成虚拟局域网;所述后台运维终端用于通过所述虚拟局域网获得所述第一控制模块预设的控制权限,远程访问控制所述自行走设备这样后台运维终端可通过网络连接到通信模块以实现后台运维终端虚拟至第一控制模块侧,通过第一控制模块控制第二控制模块,实现对自行走设备的远程访问控制、对自行走设备的远程安装、维护管理。
技术研发人员:周俊杰
受保护的技术使用者:苏州优智达机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!