一种电机鸣叫的控制方法和装置与流程
本发明涉及电机鸣叫,具体涉及一种电机鸣叫的控制方法、装置、存储介质、电子设备和计算机程序产品。
背景技术:
1、无人机动力套在使用时若出现故障,一般通过灯色故障提示,或者发送故障码给飞行控制器。飞行控制器在接收到上述故障指令后,会基于故障的类型执行对应的操作。
2、在实际应用场景中,飞行控制器,用于在起飞、巡航、降落等阶段起到辅助控制的作用;或者,飞行控制器为用于全自主对飞行器的其他系统及元器件起到协同控制的元件。
3、现有的电机鸣叫的控制方法,无法基于当前电机鸣叫声确定当前故障类型。
技术实现思路
1、基于此,有必要针对现有的电机鸣叫的控制方法,无法基于当前电机鸣叫声确定当前故障类型的问题,提供一种电机鸣叫的控制方法、装置、存储介质、电子设备和计算机程序产品。
2、第一方面,本申请实施例提供了一种电机鸣叫的控制方法,所述方法包括:
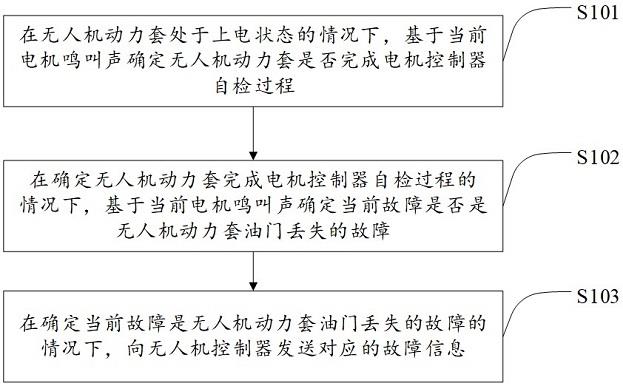
3、在无人机动力套处于上电状态的情况下,基于当前电机鸣叫声确定所述无人机动力套是否完成电机控制器自检过程;
4、在确定所述无人机动力套完成电机控制器自检过程的情况下,基于当前电机鸣叫声确定当前故障是否是无人机动力套油门丢失的故障;
5、在确定当前故障是无人机动力套油门丢失的故障的情况下,向无人机控制器发送对应的故障信息,所述故障信息中包括对应的故障类型。
6、在一种实施方式中,所述基于当前电机鸣叫声确定所述无人机动力套是否完成电机控制器自检过程,包括:
7、获取当前电机鸣叫声和第一预设电机鸣叫声,所述第一预设电机鸣叫声为确定所述无人机动力套完成电机控制器自检过程所对应的电机鸣叫声;
8、基于当前电机鸣叫声和第一预设电机鸣叫声确定所述无人机动力套是否完成电机控制器自检过程;
9、响应于当前电机鸣叫声和所述第一预设电机鸣叫声的相似度大于第一预设值,确定所述无人机动力套完成电机控制器自检过程。
10、在一种实施方式中,所述基于当前电机鸣叫声和第一预设电机鸣叫声确定所述无人机动力套是否完成电机控制器自检过程还包括:
11、响应于当前电机鸣叫声和所述第一预设电机鸣叫声的相似度小于所述第一预设值,确定未通过所述无人机动力套的电机控制器自检过程,停止运行,并向飞行控制器上报对应的故障类型。
12、在一种实施方式中,所述基于当前电机鸣叫声确定当前故障是否是无人机动力套油门丢失的故障,包括:
13、获取当前电机鸣叫声和第二预设电机鸣叫声,所述第二预设电机鸣叫声用于确定当前故障类型是否是无人机动力套油门丢失的故障;
14、基于当前电机鸣叫声和第二预设电机鸣叫声确定当前故障是否是无人机动力套油门丢失的故障;
15、响应于当前电机鸣叫声和所述第二预设电机鸣叫声的相似度大于第二预设值,确定当前故障是无人机动力套油门丢失的故障。
16、在一种实施方式中,所述基于当前电机鸣叫声和第二预设电机鸣叫声确定当前故障是否是无人机动力套油门丢失的故障,还包括:
17、响应于当前电机鸣叫声和所述第二预设电机鸣叫声的相似度小于所述第二预设值,确定当前无人机运行正常。
18、在一种实施方式中,还包括:
19、通过电机控制器设置对应的电机鸣叫模式;所述电机鸣叫模式包括基于不同的频率电压确定的电机鸣叫音色,以及基于不同的电压持续时间确定的电机鸣叫大小。
20、在一种实施方式中,所述通过电机控制器设置对应的电机鸣叫模式,包括:
21、响应于确定当前无人机进入电机鸣叫模式配置过程,设置对应的电机鸣叫脉冲宽度调制控制频率,以及设定的脉冲宽度调制占空比;
22、通过控制多个驱动mos管的导通,对电机施加对应的频率电压,并确定对应的电机鸣叫音色;
23、通过控制多个驱动mos管的导通时间,确定对应的电机鸣叫大小,并关闭脉冲宽度调制过程,以完成电机鸣叫模式的配置过程。
24、第二方面,本申请实施例提供了一种电机鸣叫的控制装置,所述装置包括:
25、第一确定模块,用于在无人机动力套处于上电状态的情况下,基于当前电机鸣叫声确定所述无人机动力套是否完成电机控制器自检过程;
26、第二确定模块,用于在确定所述无人机动力套完成电机控制器自检过程的情况下,基于当前电机鸣叫声确定当前故障是否是无人机动力套油门丢失的故障;
27、发送模块,用于在确定当前故障是无人机动力套油门丢失的故障的情况下,向无人机控制器发送对应的故障信息,所述故障信息中包括对应的故障类型。
28、第三方面,本申请实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序用于执行上述的方法步骤。
29、第四方面,本申请实施例提供一种电子设备,所述电子设备包括:
30、处理器;
31、用于存储所述处理器可执行指令的存储器;
32、所述处理器,用于从所述存储器中读取所述可执行指令,并执行所述可执行指令以实现上述的方法步骤。
33、第五方面,本申请实施例提供一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现上述的方法步骤。
34、在本申请实施例中,在无人机动力套处于上电状态的情况下,基于当前电机鸣叫声确定无人机动力套是否完成电机控制器自检过程;在确定无人机动力套完成电机控制器自检过程的情况下,基于当前电机鸣叫声确定当前故障是否是无人机动力套油门丢失的故障;以及在确定当前故障是无人机动力套油门丢失的故障的情况下,向无人机控制器发送对应的故障信息,故障信息中包括对应的故障类型。本申请实施例提供的电机鸣叫的控制方法,不仅能够基于当前电机鸣叫声确定无人机动力套是否完成电机控制器自检过程,还能够基于当前电机鸣叫声确定当前故障是否是无人机动力套油门丢失的故障;无需使用蜂鸣器,通过无人机动力套发出特定声音。
技术特征:
1.一种电机鸣叫的控制方法,包括:
2.根据权利要求1所述的方法,其中,所述基于当前电机鸣叫声确定所述无人机动力套是否完成电机控制器自检过程,包括:
3.根据权利要求2所述的方法,其中,所述基于当前电机鸣叫声和第一预设电机鸣叫声确定所述无人机动力套是否完成电机控制器自检过程还包括:
4.根据权利要求1所述的方法,其中,所述基于当前电机鸣叫声确定当前故障是否是无人机动力套油门丢失的故障,包括:
5.根据权利要求4所述的方法,其中,所述基于当前电机鸣叫声和第二预设电机鸣叫声确定当前故障是否是无人机动力套油门丢失的故障,还包括:
6.根据权利要求1所述的方法,其中,还包括:
7.根据权利要求6所述的方法,其中,所述通过电机控制器设置对应的电机鸣叫模式,包括:
8.一种电机鸣叫的控制装置,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序用于执行上述权利要求1至7中任一项所述的方法。
技术总结
本申请实施例公开了一种电机鸣叫的控制方法、装置、存储介质和电子设备,其方法包括:在无人机动力套处于上电状态的情况下,基于当前电机鸣叫声确定无人机动力套是否完成电机控制器自检过程;在确定无人机动力套完成电机控制器自检过程的情况下,基于当前电机鸣叫声确定当前故障是否是无人机动力套油门丢失的故障;以及在确定当前故障是无人机动力套油门丢失的故障的情况下,向无人机控制器发送对应的故障信息,故障信息中包括对应的故障类型。
技术研发人员:庞智,阳健,许磊,张捷
受保护的技术使用者:深圳市好盈科技股份有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!