一种基于障碍物躲避的路径规划方法、装置以及机器人与流程
本申请涉及机器人的,具体而言,涉及一种基于障碍物躲避的路径规划方法、装置以及机器人。
背景技术:
1、目前的机器人导航方案通常能使机器人躲避简单的静态障碍物,但是当机器人遇到动态障碍物时,机器人通常会选择直接原地等待或者掉头运行一段距离,存在避障效率低下的问题,有待进一步改进。
技术实现思路
1、基于此,为了解决现有技术中避障效率低下的问题,本申请实施例提供了一种基于障碍物躲避的路径规划方法、装置以及机器人,其具体技术方案如下:
2、第一方面,本申请实施例提供了一种基于障碍物躲避的路径规划方法,所述方法包括:
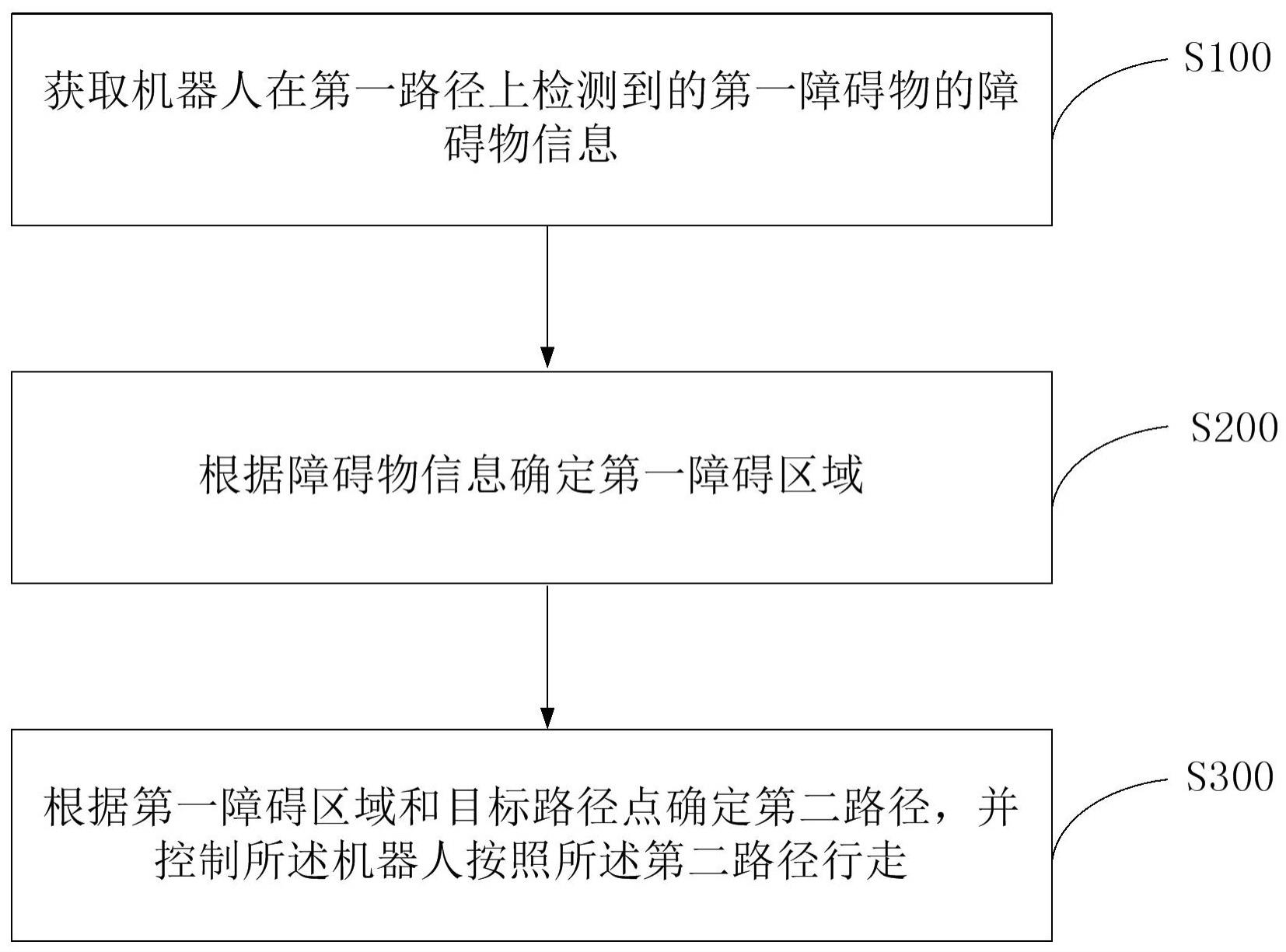
3、获取所述机器人在第一路径上检测到的第一障碍物的障碍物信息,所述第一路径包括至少一个目标路径点;
4、根据所述障碍物信息确定第一障碍区域,所述第一障碍区域用于描述所述第一障碍物预估的运动区域;
5、根据所述第一障碍区域和所述目标路径点确定第二路径,并控制所述机器人按照所述第二路径行走,所述第二路径用于指示所述机器人绕开所述第一障碍区域。
6、本申请实施例提供的路径规划方法,终端设备首先确定第一障碍物的障碍物信息,然后确定第一障碍物的第一障碍区域,再根据第一障碍区域和目标路径点确定第二路径,最后控制机器人按照第二路径行走,从而使机器人在遇到动态障碍物的前提下,可以并非直接原地等待或者非掉头运行一段距离,而是绕开第一障碍区域继续行走,大幅度地提高避障效率。
7、第二方面,本申请实施例提供了一种基于障碍物躲避的路径规划装置,所述装置包括:
8、障碍物信息获取模块:用于获取所述机器人在第一路径上检测到的第一障碍物的障碍物信息,所述第一路径包括至少一个目标路径点;
9、障碍区域确定模块:用于根据所述障碍物信息确定第一障碍区域,所述第一障碍区域用于描述所述第一障碍物预估的运动区域;
10、路径确定模块:用于根据所述第一障碍区域和所述目标路径点确定第二路径,并控制所述机器人按照所述第二路径行走,所述第二路径用于指示所述机器人绕开所述第一障碍区域。
11、第三方面,本申请实施例提供了一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面的方法的步骤。
12、第四方面,本申请实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面的方法的步骤。
13、可以理解的是,上述第二方面至第四方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
技术特征:
1.一种基于障碍物躲避的路径规划方法,适用于机器人,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述第一障碍区域和所述目标路径点确定第二路径,包括:
3.根据权利要求2所述的方法,其特征在于,所述机器人安装有相机,在所述根据预设的第一距离值和所述目标边界点,确定第一避障路径点之后,所述方法还包括:
4.根据权利要求3所述的方法,其特征在于,所述若所述第一障碍物属于危险类别,则根据所述第一避障路径点和预设的第二距离值,确定所述第二避障路径点,包括:
5.根据权利要求1所述的方法,其特征在于,在所述根据所述第一障碍区域和所述目标路径点确定第二路径,并控制所述机器人按照所述第二路径行走之后,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,所述障碍物信息包括所述第一障碍物的尺寸信息、速度信息和第三位置信息,所述根据所述障碍物信息确定第一障碍区域,包括:
7.一种基于障碍物躲避的路径规划装置,适用于机器人,其特征在于,所述装置包括:
8.根据权利要求7所述的装置,其特征在于,所述装置还包括:
9.一种机器人,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至6任一项所述方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述方法的步骤。
技术总结
本申请适用于机器人的技术领域,提供了一种基于障碍物躲避的路径规划方法、装置以及机器人,其方法适用于机器人,其方法包括获取机器人在第一路径上检测到的第一障碍物的障碍物信息,第一路径包括至少一个目标路径点;根据障碍物信息确定第一障碍区域,第一障碍区域用于描述第一障碍物预估的运动区域;根据第一障碍区域和目标路径点确定第二路径,并控制机器人按照第二路径行走,第二路径用于指示机器人绕开第一障碍区域。本申请能够提高机器人的避障效率。
技术研发人员:刘思文,皮康,梁瑞豪,陈伟波
受保护的技术使用者:佛山隆深机器人有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!