一种面向翼身融合飞翼无人机的姿态容错控制方法
本发明属于无人机控制,特别涉及一种面向翼身融合飞翼无人机的姿态容错控制方法。
背景技术:
1、翼身融合飞翼无人机由于其在未来军事和民用航空方面的巨大潜力而受到了极大的关注。与常规布局无人机相比,翼身融合飞翼无人机在机动性、航程和隐身性能方面具有显著优势。然而,由于没有垂直尾翼和水平尾翼,导致翼身融合飞翼无人机的纵向和横向动力学之间的稳定性降低和耦合更大,这给飞行控制器设计人员带来了巨大的挑战。
2、翼身融合飞翼无人机的执行器故障可能导致系统性能下降,甚至导致不可预测的事故。可靠性和安全性对于翼身融合飞翼无人机来说是十分重要的。现有的容错控制方法一般可分为两种,即主动容错控制方法和被动容错控制方法。主动容错控制方法能够主动响应系统故障,并根据实时故障信息重新配置控制器。而被动容错控制方法是采用鲁棒控制思想用于控制器设计。虽然被动容错控制方法比主动容错控制方法更保守,但被动容错控制方法有两个优点:(1)被动容错控制方法可以使用固定控制器来应对一类假定的故障,例如执行器故障。(2)被动容错控制方法既不需要故障检测和诊断模块,也不需要重新配置机制。
技术实现思路
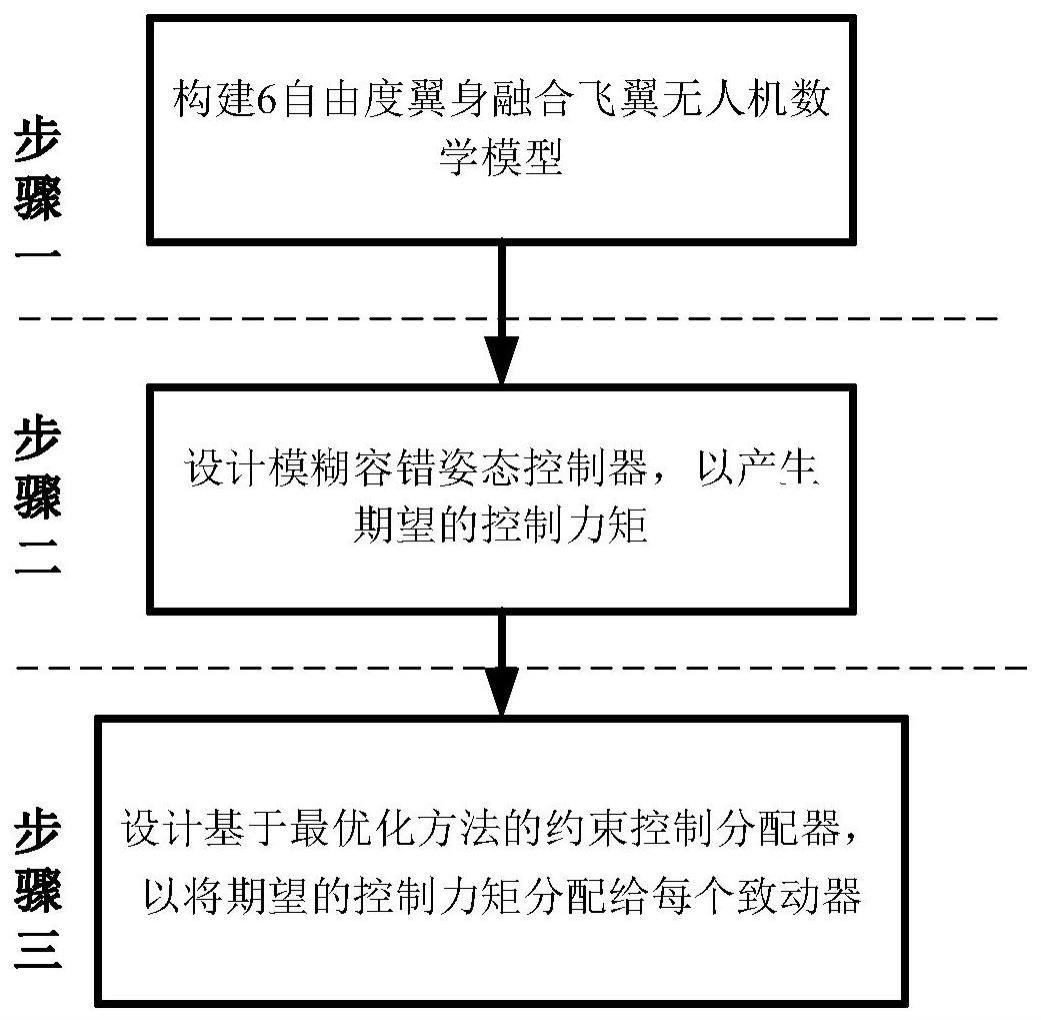
1、针对现有技术存在的问题,本发明提出一种面向翼身融合飞翼无人机的姿态容错控制方法,该方法包含一个固定时间模糊容错控制器和一个基于最优化方法的约束控制分配器。固定时间模糊容错控制器能够在具有外部干扰、不确定参数和时变执行器故障的前提下反推得到期望的转矩,而基于最优化方法的约束控制分配器则是用来向每个执行器分配期望的控制转矩。该方法能够使翼身融合飞翼无人机在遭遇执行器故障时依然能够实现对期望姿态的跟踪控制。
2、本发明的技术方案为:
3、1.一种面向翼身融合飞翼无人机的姿态容错控制方法,其特征在于:包括以下步骤:
4、步骤1:构建6自由度翼身融合飞翼无人机的面向控制数学模型为:
5、
6、
7、式中,fω=j-1ma-j-1ω×jω;其中χ为飞机的航向角;γ为飞机的航迹角;μ为飞机速度倾斜角;α为飞机迎角;β为飞机侧滑角;μ、α和β共同组成了飞机的气流姿态角ω=[μ,α,β];ch/b为飞机机体系到航向系的旋转矩阵;j为飞机的转动惯量矩阵;ma为机身产生的力矩;p为飞机滚转角速度;q为飞机俯仰角速度;r为飞机偏航角速度;p,q,r共同组成了飞机角速度向量ω=[p,q,r];b为控制效率矩阵,σ=diag[σlamt,σlele,σpf,σrele,σramt],σlamt和σramt表示一对翼尖翼的作动器效率,σlele和σrele表示一对副翼的作动器效率,σpf表示俯仰襟翼的作动器效率;d为外界干扰,δj为j的不确定量,δa为通过控制分配器得到的作动器偏转值,mc为需要计算的期望控制力矩,通过容错控制器得到,为作动器偏置故障;
8、步骤2:设计模糊容错姿态控制器,以产生期望的控制力矩:
9、步骤2.1:定义姿态跟踪误差z1=[z1μ,z1α,z1β],并且
10、z1=ω-ωd
11、式中,ωd=[μd,αd,βd]为期望的姿态;
12、步骤2.2:设计一个非奇异固定时间终端滑模面如下:
13、
14、式中,k11、k12、q1、q2为终端滑模面参数;sig为sigmoid阈值函数的缩写;
15、步骤2.3:对姿态跟踪误差进行微分,然后根据面向控制数学模型得到
16、
17、步骤2.4:结合步骤2.2和步骤2.3,设计中间控制律得到期望的姿态角速度ωc=[ωc1,ωc2,ωc3],中间控制律如下
18、
19、式中,k13、k14也为终端滑模面参数;
20、步骤2.5:根据得到的期望的姿态角速度ωc,定义姿态角速度跟踪误差为
21、z2=ω-ωc
22、步骤2.6:为姿态角速度控制设计一个非奇异固定时间终端滑模面如下:
23、
24、式中,k21、k22、q1、q2为终端滑模面参数;sig为sigmoid阈值函数的缩写;
25、步骤2.7:对姿态角速度跟踪误差进行微分,然后根据面向控制数学模型得到
26、
27、步骤2.8:结合步骤2.6和步骤2.7,设计角速度控制律得到期望的控制力矩mc,角速度控制律如下:
28、
29、式中,k23、k24也为终端滑模面参数;
30、步骤2.9:将得到的期望控制力矩mc分解到机体的三个轴上,得到mcx,mcy,mcz;
31、步骤3:设计基于最优化方法的约束控制分配器,将期望的控制力矩mc分配给每个作动器:
32、步骤3.1:构建优化问题的目标函数为:
33、q=(w1(bδa-mc))t(w1(bδa-mc))+(w2(δa-δd))t(w2(δa-δd))
34、式中,w1和w2为优化系数权重;δd为与作动器偏转相关的设计参数;
35、步骤3.2:建立统一模型,用于约束δa的变化速率,该模型为:
36、δimin≤δai≤δimax
37、
38、式中,i=lamt,ramt,pf,lele,rele;
39、步骤3.3:结合步骤3.1和步骤3.2,得到最终的约束控制分配最优化问题为:
40、min q
41、
42、步骤4:求解步骤3建立的优化问题,得到最终的每个作动器的输入值,飞翼布局无人机在作动器作用下实现故障下的容错飞行。
43、一种计算机可读存储介质,存储有计算机可执行程序,所述计算机可执行程序在被执行时用于实现上述的方法。
44、一种计算机系统,包括:一个或多个处理器,计算机可读存储介质,用于存储一个或者多个程序,其中,当所述一个或者多个程序被所述一个或者多个处理器执行时,使得所述一个或者多个处理器实现上述方法。
45、有益效果
46、本发明提供的一种面向翼身融合飞翼无人机的容错姿态控制方法与传统方法相比,具有更好的逼近不确定性的能力,并且可以确保姿态跟踪误差和角速度跟踪误差在指定时间内收敛。最重要的是,与传统的翼身融合飞翼无人机控制分配方法相比,本发明提出的方法能够求解翼身融合飞翼无人机约束控制分配的最优解,该方案具有更低的能耗和更小的执行器偏转。
47、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种面向翼身融合飞翼无人机的姿态容错控制方法,其特征在于:包括以下步骤:
2.一种计算机可读存储介质,其特征在于:存储有计算机可执行程序,所述计算机可执行程序在被执行时用于实现权利要求1所述的方法。
3.一种计算机系统,其特征在于:包括:一个或多个处理器,权利要求2所述计算机可读存储介质,用于存储一个或者多个程序,其中,当所述一个或者多个程序被所述一个或者多个处理器执行时,使得所述一个或者多个处理器实现权利要求1所述的方法。
技术总结
本发明提供一种面向翼身融合飞翼无人机的姿态容错控制方法。该方法包含一个固定时间模糊容错控制器和一个基于最优化方法的约束控制分配器。固定时间模糊容错控制器能够在具有外部干扰、不确定参数和时变执行器故障的前提下反推得到期望的转矩,而基于最优化方法的约束控制分配器则是用来向每个执行器分配期望的控制转矩。该方法能够使翼身融合飞翼无人机在遭遇执行器故障时依然能够实现对期望姿态的跟踪控制,与传统方法相比,具有更好的逼近不确定性的能力,并且可以确保姿态跟踪误差和角速度跟踪误差在指定时间内收敛。本发明提出的方法能够求解翼身融合飞翼无人机约束控制分配的最优解,该方案具有更低的能耗和更小的执行器偏转。
技术研发人员:陈树生,李金平,高红岗,张振刚,高正红,邹旭
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!