一种水下机器人的控制方法及水下机器人与流程
本发明主要涉及智能机器人,具体涉及一种水下机器人的控制方法及水下机器人。
背景技术:
1、水下机器人是海洋工作中常用的设备之一,水下机器人能够代替海上工作人员潜入水中进行设备检测工作,因此水下机器人一般设置有水平驱动装置,使得水下机器人能够在水中进行巡航工作,现有的水下机器人一般设置多个水平驱动装置,通过多个水平驱动装置配合实现水下机器人的转向、前行、掉头等巡航操作,但是现有的水下机器人的水平驱动装置一般是固定在机器人主体上,不能针对水下机器人的工作调整输出角度,水下机器人在水中巡航时的水流流动复杂,在水下机器人四周形成湍流,使得水下机器人受到的水流阻力增大,容易影响水下机器人水下工作的稳定性和可靠性。
技术实现思路
1、本发明的目的在于克服现有技术的不足,本发明提供了一种水下机器人的控制方法及水下机器人,所述控制方法通过对水下机器人的巡航工作进行数字孪生实时仿真检测,结合仿真结果调整水下机器人的水平驱动装置的输出角度,从而减少水下机器人的巡航时受到的水流阻力,有效提高所述水下机器人巡航运动的稳定性和可靠性。
2、本发明提供了一种水下机器人的控制方法,所述水下机器人的控制方法包括:
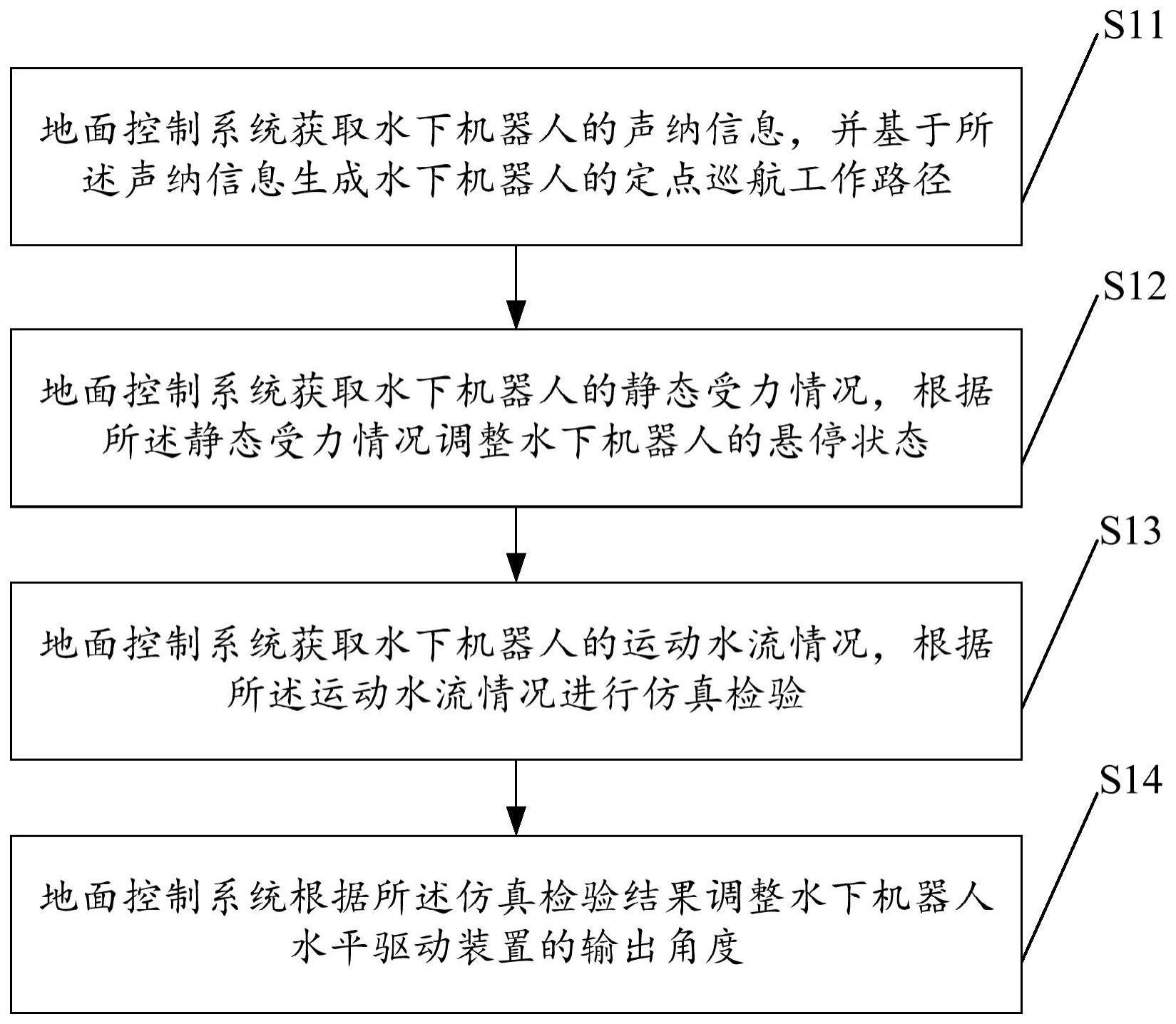
3、地面控制系统获取水下机器人的声纳信息,并基于所述声纳信息生成水下机器人的定点巡航工作路径;
4、地面控制系统获取水下机器人的静态受力情况,根据所述静态受力情况调整水下机器人的悬停状态;
5、地面控制系统获取水下机器人的运动水流情况,根据所述运动水流情况进行仿真检验;
6、地面控制系统根据所述仿真检验结果调整水下机器人水平驱动装置的输出角度。
7、进一步的,所述水下机器人的控制方法还包括:
8、地面控制系统获取水下机器人的受压情况,分析得到水下机器人的下潜深度;
9、地面控制系统根据水下机器人的下潜深度调整垂直驱动装置的输出功率。
10、进一步的,地面控制系统获取水下机器人的声纳信息,并基于所述声纳信息生成水下机器人的定点巡航工作路径包括:
11、在水面上设置浮标,并记录浮标的位置信息;
12、获取水下机器人的声纳信息,将所述声纳信息结合所述浮标的位置信息生成水下工作地图;
13、在所述水下工作地图中规划所述水下机器人的定点巡航工作路径。
14、进一步的,所述获取水下机器人的声纳信息,将所述声纳信息结合所述浮标的位置信息生成水下工作地图包括:
15、以所述浮标的位置信息为坐标原点建立坐标系,结合所述水下机器人的声纳信息在所述坐标系构建水下工作地图。
16、进一步的,所述地面控制系统根据所述水下检测工作画面确定所述水下机器人的有效检测范围包括:
17、所述地面控制系统对所述水下检测工作画面信息进行分析处理,得到若干个拍摄图像信息;
18、所述地面控制系统在若干个所述拍摄图像信息中提取所述水下机器人的有效检测图像。
19、进一步的,所述地面控制系统获取水下机器人的静态受力情况,根据所述静态受力情况调整水下机器人的悬停状态包括:
20、地面控制系统获取水下机器人在水中工作时,悬浮状态下的静态受力情况,根据所述水下机器人的静态受力情况调整水下机器人垂直驱动装置的输出功率。
21、进一步的,所述地面控制系统获取水下机器人的运动水流情况,根据所述运动水流情况进行仿真检验包括:
22、所述地面控制系统获取水下工作环境的水流流速和流向,基于所述水流流速和流向进行数字孪生实时仿真,得到水下机器人在水下工作环境中的运动姿态。
23、进一步的,所述地面控制系统根据所述仿真检验结果调整水下机器人水平驱动装置的输出角度包括:
24、所述地面控制系统根据所述水下机器人的仿真结果,根据水下机器人的目标运动姿态和当前运动姿态进行矢量分解,调整每个水平驱动装置的输出角度。
25、本发明还提供了一种水下机器人,所述水下机器人用于执行所述控制方法,所述水下机器人包括框架和若干个驱动装置;
26、若干个所述驱动装置包括水平驱动装置,所述水平驱动装置转动连接在所述框架内。
27、进一步的,所述水下机器人还包括机器人主体,若干个所述驱动装置还包括垂直驱动装置;
28、所述机器人主体内设置有通槽,所述垂直驱动装置设置在所述通槽的一端上。
29、本发明提供了一种水下机器人的控制方法及水下机器人,所述控制方法通过实时采集水下机器人在水中的参数,对水下机器人的巡航工作进行数字孪生实时仿真检测,结合仿真结果调整水下机器人的水平驱动装置的输出角度,从而减少水下机器人的巡航时受到的水流阻力,有效提高所述水下机器人巡航运动的稳定性和可靠性。
技术特征:
1.一种水下机器人的控制方法,其特征在于,所述水下机器人的控制方法包括:
2.如权利要求1所述的水下机器人的控制方法,其特征在于,所述水下机器人的控制方法还包括:
3.如权利要求1所述的水下机器人的控制方法,其特征在于,地面控制系统获取水下机器人的声纳信息,并基于所述声纳信息生成水下机器人的定点巡航工作路径包括:
4.如权利要求3所述的水下机器人的控制方法,其特征在于,所述获取水下机器人的声纳信息,将所述声纳信息结合所述浮标的位置信息生成水下工作地图包括:
5.如权利要求3所述的水下机器人的控制方法,其特征在于,所述地面控制系统根据所述水下检测工作画面确定所述水下机器人的有效检测范围包括:
6.如权利要求1所述的水下机器人的控制方法,其特征在于,所述地面控制系统获取水下机器人的静态受力情况,根据所述静态受力情况调整水下机器人的悬停状态包括:
7.如权利要求1所述的水下机器人的控制方法,其特征在于,所述地面控制系统获取水下机器人的运动水流情况,根据所述运动水流情况进行仿真检验包括:
8.如权利要求1所述的水下机器人的控制方法,其特征在于,所述地面控制系统根据所述仿真检验结果调整水下机器人水平驱动装置的输出角度包括:
9.一种水下机器人,其特征在于,所述水下机器人用于执行如权利要求1至8任一所述的控制方法,所述水下机器人包括框架和若干个驱动装置;
10.如权利要求9所述的水下机器人,其特征在于,所述水下机器人还包括机器人主体,若干个所述驱动装置还包括垂直驱动装置;
技术总结
本发明公开了一种水下机器人的控制方法及水下机器人,所述水下机器人的控制方法包括:地面控制系统获取水下机器人的声纳信息,并基于所述声纳信息生成水下机器人的定点巡航工作路径;地面控制系统获取水下机器人的静态受力情况,根据所述静态受力情况调整水下机器人的悬停状态;地面控制系统获取水下机器人的运动水流情况,根据所述运动水流情况进行仿真检验;地面控制系统根据所述仿真检验结果调整水下机器人水平驱动装置的输出角度。所述控制方法通过对水下机器人进行数字孪生实时仿真检测,结合仿真结果调整水下机器人的水平驱动装置的输出角度,从而减少水下机器人受到的水流阻力,有效提高所述水下机器人水下工作的稳定性和可靠性。
技术研发人员:刘丽诗
受保护的技术使用者:刘丽诗
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!