一种多功能水下航行器智能控制系统的制作方法
本发明属于水下航行器,特别是涉及一种多功能水下航行器智能控制系统。
背景技术:
1、近年来,随着海洋资源的开发和无人武器系统在战场上的广泛应用,水下航行器受到了各海洋强国的广泛重视,并得到了越来越深入的研究。水下航行器已经广泛应用在商业、科学等领域,包括地球物理现场调查、高分辨率高速海底测绘成像、海洋地质调查、海洋环境监测、海底生物和矿产资源的勘测采样、海洋工程维护、小型沉物打捞等方面。目前,大部分水下航行器是针对单一任务目标进行设计研发,其功能比较单一,当水下执行多任务时,则需要多个水下航行器进行协调工作,工作效率比较低。
技术实现思路
1、本发明要解决的技术问题是:提供一种多功能水下航行器智能控制系统。能够同时执行多种任务,提高工作的效率。
2、本发明为解决公知技术中存在的技术问题所采取的技术方案是:
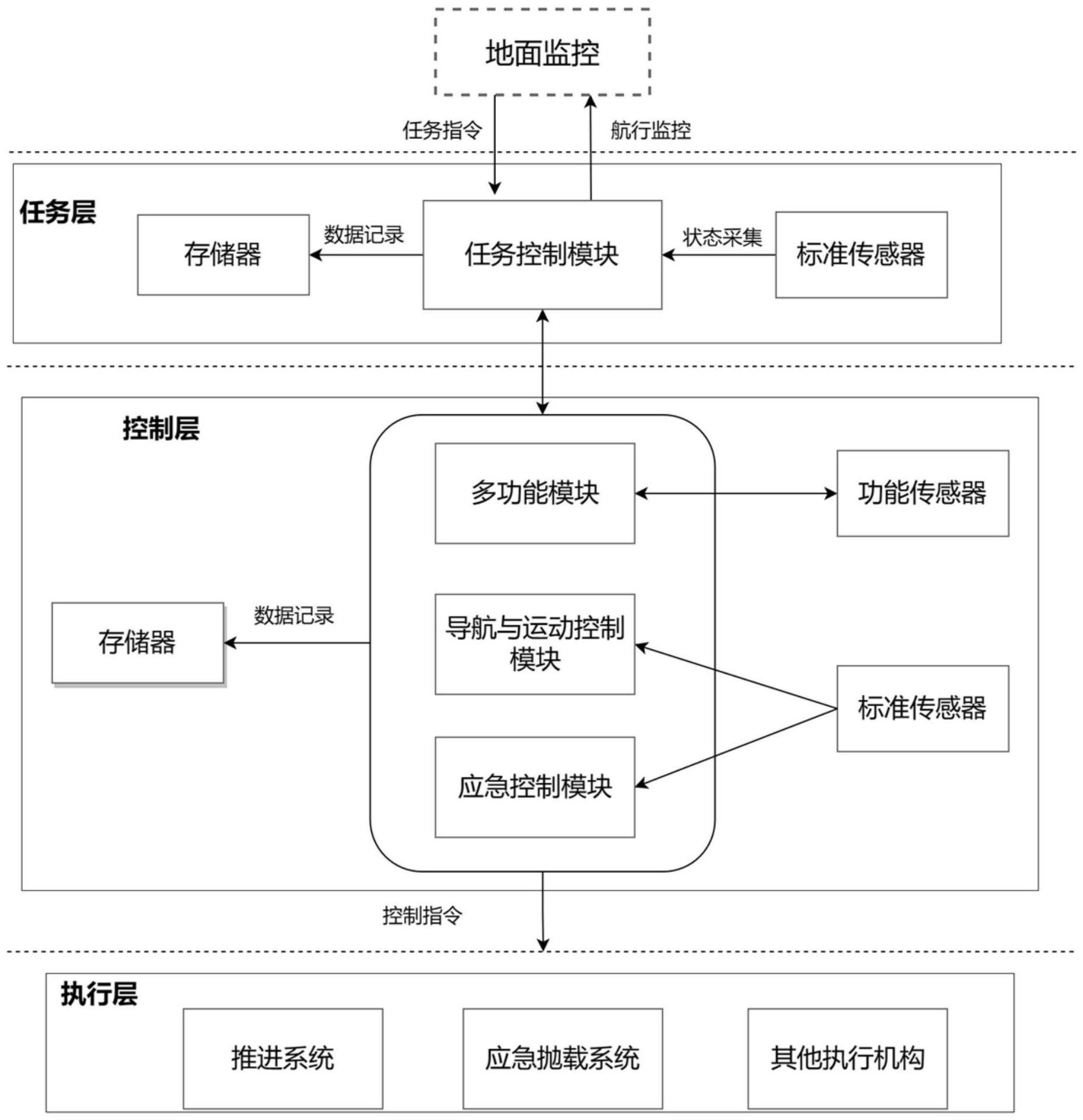
3、一种多功能水下航行器智能控制系统,包括:
4、任务层,与地面监控系统通讯,获取任务指令并反馈水下航行器的状态数据;通过采集标准传感器数据,解析得到航行状态数据,将航行状态数据存储并提供给控制层;
5、控制层,所述控制层包括导航与运动控制模块、应急控制模块和多功能模块,所述导航与运动控制模块依据既定流程和航行状态数据进行水下潜航器航行自动航行控制以及定位导航控制;所述应急控制模块根据传感器的状态数据实时判断水下潜航器的状态,并执行相应的控制策略;所述多功能模块根据任务解析选择对应的传感器和算法;
6、执行层,所述执行层根据控制层的控制指令进行各设备的供电以及上断电控制。
7、进一步:所述任务层包括任务控制模块。
8、进一步:所述执行层包括推进系统和应急抛载系统。
9、进一步:所述标准传感器包括深度传感器、gps、ins、dvl、usbl和高度计。
10、进一步:功能传感器包括声呐、海底地层剖面仪、ctd、adcp、湍流传感器、相机中的一种或多种。
11、进一步:所述声呐包括前向声呐和侧向扫描声呐。
12、进一步:所述航行自动航行控制的过程包括:
13、s101、启动水下航行器,并导入潜航模式;
14、s102、开启传感器,并检测传感器的状态;当传感器状态正常时,则执行s103,否则进入水面过渡阶段;
15、s103、开启电机,并检测电机状态;当电机状态正常时,则执行s104,否则进入水面过渡阶段;
16、s104、检测通讯状态;当通讯状态正常时,则执行s105,否则进入水面过渡阶段;
17、s105、判定是否下潜,如需要下潜,则执行s106,否则进入水面航行;
18、s106、判定是否为水下定深航行,如为水下定深航行,则执行s107,否则执行水下定深航行;
19、s107、调整下潜俯仰姿态;
20、s108、调节浮力大小;
21、s109、在下潜航行阶段,判断实际深度是否不小于目标深度,如果实际深度小于目标深度,则继续下潜,否则执行s110;
22、s110、调节浮力大小;
23、s111、在上浮航行阶段,判断实际深度是否小于设定深度,如果实际深度不小于设定深度,则继续上浮,否则执行s112;
24、s112、执行水面等待阶段;
25、s113、判断通讯是否成功,如果不成功,则执行s111;否则执行s114;
26、s114、等待接收启动航行指令,进入下一次航行。
27、进一步:所述定位导航控制的过程包括:
28、s201、首先判断是否导入潜航模式,如果没有导入潜航模式,则控制滚转电机上电断电;否则执行s202;
29、s202、计算航向角偏差;偏差=目标航向角-实际航向角;
30、s203、判断偏差是否大于允许偏差,如果偏差不大于允许偏差,则不进行调整,滚转控制量为0;否则执行s204;
31、s204、判断是下潜阶段还是上浮阶段,如果既不是下潜阶段也不是上浮阶段,则不调整;如果是下潜阶段或上浮阶段,则执行s205;
32、s205、计算滚转控制量,滚转控制量=比例系数*偏差+零位校准值;
33、s206、滚转电机驱动电池包绕轴转动。
34、进一步:所述应急控制模块的控制过程包括:在潜航模式下,
35、如果电池电压低于电压安全阈值,且持续时间超过5s,则报警并上浮;
36、如果电池电流大于电流安全阈值,且持续时间超过2s,则报警并抛载;
37、如果舱内压力大于舱压安全阈值,且持续时间超过4s,则报警并抛载;
38、如果姿态不在预设范围内,则报警;
39、如果深度超过设定深度,且持续时间超过10s,则报警并上浮;
40、如果高度低于设定高度,且持续时间超过10s,则报警并上浮;
41、如果距离大于控制距离,且持续时间超过30s,则报警并上浮回收;
42、如果泵运行超时,则抛载;
43、如果运行时间超时,则抛载;
44、如果续航时间超时,则上浮回收;
45、如果电机运行超时,则报警并断电。
46、本发明具有的优点和积极效果是:
47、本发明的技术方案包括三层结构,各层任务功能清晰分明,能实现高效运行,不申请能够同时执行多种任务,提高工作的效率;具有较高的扩展性,便于功能的修改添加和维护。
技术特征:
1.一种多功能水下航行器智能控制系统;其特征在于,包括:
2.根据权利要求1所述的多功能水下航行器智能控制系统,其特征在于:所述任务层包括任务控制模块。
3.根据权利要求1所述的多功能水下航行器智能控制系统,其特征在于:所述执行层包括推进系统和应急抛载系统。
4.根据权利要求1所述的多功能水下航行器智能控制系统,其特征在于:所述标准传感器包括深度传感器、gps、ins、dvl、usbl和高度计。
5.根据权利要求1所述的多功能水下航行器智能控制系统,其特征在于:功能传感器包括声呐、海底地层剖面仪、ctd、adcp、湍流传感器、相机中的一种或多种。
6.根据权利要求5所述的多功能水下航行器智能控制系统,其特征在于:所述声呐包括前向声呐和侧向扫描声呐。
7.根据权利要求1所述的多功能水下航行器智能控制系统,其特征在于:所述航行自动航行控制的过程包括:
8.根据权利要求1所述的多功能水下航行器智能控制系统,其特征在于:所述定位导航控制的过程包括:
9.根据权利要求1所述的多功能水下航行器智能控制系统,其特征在于:所述应急控制模块的控制过程包括:在潜航模式下,
技术总结
本发明公开了一种多功能水下航行器智能控制系统,属于水下航行器技术领域,包括:任务层,与地面监控系统通讯,获取任务指令并反馈水下航行器的状态数据;通过采集标准传感器数据,解析得到航行状态数据,将航行状态数据存储并提供给控制层;控制层,所述控制层包括导航与运动控制模块、应急控制模块和多功能模块,所述导航与运动控制模块依据既定流程和航行状态数据进行水下潜航器航行自动航行控制以及定位导航控制;所述应急控制模块根据传感器的状态数据实时判断水下潜航器的状态,并执行相应的控制策略;所述多功能模块根据任务解析选择对应的传感器和算法;执行层,所述执行层根据控制层的控制指令进行各设备的供电以及上断电控制。
技术研发人员:李阁阁,兰世泉,崔陈铭,李鹏浩,赵旭
受保护的技术使用者:天津慧洋智能装备有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!