基于重载型编码器的重载闭环驱动系统的制作方法
本发明涉及重载编码器,具体为一种基于重载型编码器的重载闭环驱动系统。
背景技术:
1、为了适应更苛刻的工业环境,重载编码器专门被研发出来。与传统的工业编码器相比,重载编码器具有更强的抗冲击和震动的能力,他们的外壳也可以适应各种恶劣的环境;
2、重载编码器一般采用磁阻技术以实现更高的稳定性,磁性编码器从原理上克服了传统光电编码器的不足,保证了重载场合的可靠运行。如果是采用光学原理,那么码盘也一定采用不会破碎的材料来制成,一般为金属或者聚酯薄膜材料。在结构上为了配合大功率电机的应用,重载编码器一般都采用超大孔径设计,而且可以直接安装在各类电机的端面上。在轴的保护上一般都具有热隔离和电气隔离;
3、重载场合运行中存在较大的位能负载,必须采用通过编码器反馈信号进行自动控制的闭环控制系统,如果将变频器驱动系统设定为开环控制,当重载场合设备工作角度过大时,其位能负载增大,驱动系统输出的驱动重力不能平衡稳定,使得变频器检测变化较大,造成力矩输出时通时断,运行时动作时有时无,从而容易导致重载设备发生故障;
4、于是,有鉴于此,针对现有的结构及缺失予以研究改良,一种基于重载型编码器的重载闭环驱动系统。
技术实现思路
1、本发明的目的在于提供一种基于重载型编码器的重载闭环驱动系统,以解决上述背景技术中提出的问题。
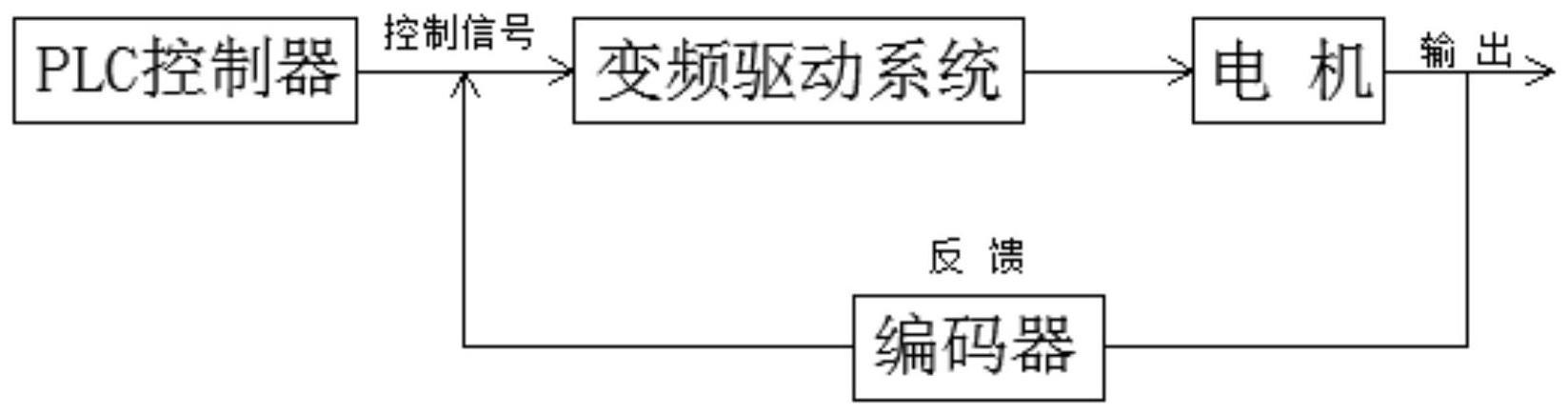
2、为实现上述目的,本发明提供如下技术方案:一种基于重载型编码器的重载闭环驱动系统,包括:plc控制器、变频驱动系统、电机和编码器,所述plc控制器电性连接有变频驱动系统,所述变频驱动系统电性连接有电机,所述电机的输出端通过编码器与plc控制器相连接。
3、进一步的,所述plc控制器、变频驱动系统和电机之间构成串联结构,且变频驱动系统程序设置为编码器控制,并且变频驱动系统程序与编码器系统参数相匹配。
4、进一步的,所述plc控制器、变频驱动系统和电机之间采用自动化netlinx开放网络体系结构,且兼容了所有源/目的地模式所具备的通讯能力,同时具备更高的数据传输效率,因此它能有效地控制、组态、采集信息和数据。
5、进一步的,所述变频驱动系统的pid控制主要包括速度闭环、角度闭环和换相角相位延迟调节闭环,且电机的其反馈量为前一次编码器采样到的输出量,与给定的量进行比较,经过pid调节算法,具体如下列公式⑥:
6、
7、式⑥中:kp是比例系数;kt;是积分系数;kd是微分系数;zc和zk-1是第k、k-1采样时刻输人的偏差值。
8、进一步的,所述电机的输出端与编码器中心孔进行柔性机械连接,且电机的输出端每转动1圈编码器就会提供1024个脉冲反馈。
9、进一步的,所述电机同一时刻只有两个绕组通电,电机工作时,有如下关系式①:
10、
11、式①中:ua是母线电压;ra是电流检测电阻;i是通电绕组中电流;e是通电绕组中的感应电势;
12、反电势有如下关系式②:
13、e=2pnfτbmω②
14、式②中:p是电机极对数;n是电机绕组匝数;f是导体有效长度;τ是电机的极距;bm是转子水磁体气缝磁密分布的最大值;ω是电机转速;
15、将式①代入式②并简化,如下列公式③:
16、
17、式③中:ra是绕组线电阻与电流检测电阻的差,ra=2r-r;k1是反电势系数,k1=2pnfτbmω,ω是电机转速;
18、将式③中电流i用角速度表示,得到公式④:
19、
20、式④中:kr是电机转矩系数;j是转子转动惯量;b、是黏滞摩擦系数;t、是电机转负载;
21、其中,电机角速度ω与转角的如下关系式⑤:
22、
23、进一步的,所述电机、编码器与变频驱动系统之间采用反电势过零点检测法,且通过检测不同电相绕组中的反电动势电压过零点,在过零点处延迟30°角,即可得到电机换相。
24、进一步的,所述编码器采用增量型双通道旋转型编码器,其主要技术参数如下:工作电压为12vdc(由变频器提供),分辨率为1024p/r,输出电压为9vdc,输出相为a/b双通道(a、a-,b、b-)。
25、进一步的,所述编码器的a/b双通道输出脉冲之间的相位差为90°[t/4,t=a(b)相的一个周期],且编码器脉冲波形为方波。
26、进一步的,所述编码器内部信号检测系统一般采用光电检测系统,且检测透光板一般采用厚度小于0.05mm的合金薄板。
27、与现有技术相比,本发明的有益效果是:
28、1.本发明通过netlinx采用通用的应用层协议--控制与信息协议。控制与信息协议是基于netlinx架构的核心网络,控制协议适用于实时i/0;信息协议适用于显式报文传送,主要用于组态、数据采集和诊断,以及在基于cip协议的网络间实现路由功能,ether-net/ip可实现非时间关键的数据交换、过程监视,可以连接无限的节点,传输速率为10/100mbps,可传输1500b大小的数据包;controlnet可实现实时确定性控制、冗余系统,可以连接99个节点/网络,传输速率为5mbps,可传输510b的数据包(分组);devicenet可连接带有诊断功能的智能设备和常检查保养,可以杜绝这类故障的发生;
29、2.本发明通过将电机绕组反电动势经过反电势过零点检测电路滤波后,进行频率检测,检测后经过查表可以得到对应的延迟角度,并与30°角做差后,即得到对当前换相顺序的延迟角度,形成换相角相位延迟调节闭环。系统输人量是角度值时,表示利用电机进行角度定位;输人量是速度值时,表示利用电机速度进行控制,从而形成角度闭环和速度闭环。
技术特征:
1.一种基于重载型编码器的重载闭环驱动系统,包括:plc控制器(1)、变频驱动系统(2)、电机(3)和编码器(4),其特征在于,所述plc控制器(1)电性连接有变频驱动系统(2),所述变频驱动系统(2)电性连接有电机(3),所述电机(3)的输出端通过编码器(4)与plc控制器(1)相连接。
2.根据权利要求1所述的一种基于重载型编码器的重载闭环驱动系统,其特征在于,所述plc控制器(1)、变频驱动系统(2)和电机(3)之间构成串联结构,且变频驱动系统(2)程序设置为编码器(4)控制,并且变频驱动系统(2)程序与编码器(4)系统参数相匹配。
3.根据权利要求1所述的一种基于重载型编码器的重载闭环驱动系统,其特征在于,所述plc控制器(1)、变频驱动系统(2)和电机(3)之间采用自动化netlinx开放网络体系结构,且兼容了所有源/目的地模式所具备的通讯能力,同时具备更高的数据传输效率,因此它能有效地控制、组态、采集信息和数据。
4.根据权利要求1所述的一种基于重载型编码器的重载闭环驱动系统,其特征在于,所述变频驱动系统(2)的pid控制主要包括速度闭环、角度闭环和换相角相位延迟调节闭环,且电机(3)的其反馈量为前一次编码器(4)采样到的输出量,与给定的量进行比较,经过pid调节算法,具体如下列公式⑥:
5.根据权利要求1所述的一种基于重载型编码器的重载闭环驱动系统,其特征在于,所述电机(3)的输出端与编码器(4)中心孔进行柔性机械连接,且电机(3)的输出端每转动1圈编码器(4)就会提供1024个脉冲反馈。
6.根据权利要求1所述的一种基于重载型编码器的重载闭环驱动系统,其特征在于,所述电机(3)同一时刻只有两个绕组通电,电机(3)工作时,有如下关系式①:
7.根据权利要求1所述的一种基于重载型编码器的重载闭环驱动系统,其特征在于,所述电机(3)、编码器(4)与变频驱动系统(2)之间采用反电势过零点检测法,且通过检测不同电相绕组中的反电动势电压过零点,在过零点处延迟30°角,即可得到电机(3)换相。
8.根据权利要求1所述的一种基于重载型编码器的重载闭环驱动系统,其特征在于,所述编码器(4)采用增量型双通道旋转型编码器,其主要技术参数如下:工作电压为12vdc(由变频器提供),分辨率为1024p/r,输出电压为9vdc,输出相为a/b双通道(a、a-,b、b-)。
9.根据权利要求1所述的一种基于重载型编码器的重载闭环驱动系统,其特征在于,所述到编码器(4)的a/b双通道输出脉冲之间的相位差为90°[t/4,t=a(b)相的一个周期],且编码器(4)脉冲波形为方波。
10.根据权利要求1所述的一种基于重载型编码器的重载闭环驱动系统,其特征在于,所述编码器(4)内部信号检测系统一般采用光电检测系统,且检测透光板一般采用厚度小于0.05mm的合金薄板。
技术总结
本发明公开了一种基于重载型编码器的重载闭环驱动系统,本发明涉及重载编码器技术领域,包括:PLC控制器、变频驱动系统、电机和编码器,所述PLC控制器电性连接有变频驱动系统,所述变频驱动系统电性连接有电机,所述电机的输出端通过编码器与PLC控制器相连接,所述PLC控制器、变频驱动系统和电机之间构成串联结构,且变频驱动系统程序设置为编码器控制,并且变频驱动系统程序与编码器系统参数相匹配。该基于重载型编码器的重载闭环驱动系统,通过NetLinx采用通用的应用层协议‑‑控制与信息协议,控制与信息协议是基于NetLinx架构的核心网络,控制协议适用于实时I/0,信息协议适用于显式报文传送,主要用于组态、数据采集和诊断。
技术研发人员:李玉宝
受保护的技术使用者:无锡麦德瑞光电科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!