障碍物避让方法、装置、域控制器和存储介质与流程
【】本发明实施例涉及自动驾驶,尤其涉及一种障碍物避让方法、装置、域控制器和存储介质。
背景技术
0、
背景技术:
1、目前在半封闭场景下的自动驾驶系统,大多采用的都是循迹的自动驾驶系统,车辆往往仅能按照规划好的轨迹线路进行自动驾驶。对于简单的自动驾驶场景而言,这种自动驾驶技术是能够胜任的,但如果自动驾驶场景较为复杂,需要车辆进行避障、绕行等动作时,按照单一轨迹行驶的车辆难以完成这些动作,无法满足复杂多变场景的自动驾驶要求,车辆的灵活性较差。
技术实现思路
0、
技术实现要素:
1、有鉴于此,本发明实施例提供了一种障碍物避让方法、装置、域控制器和存储介质,用以解决复杂自动驾驶场景下车辆的灵活性较差的问题。
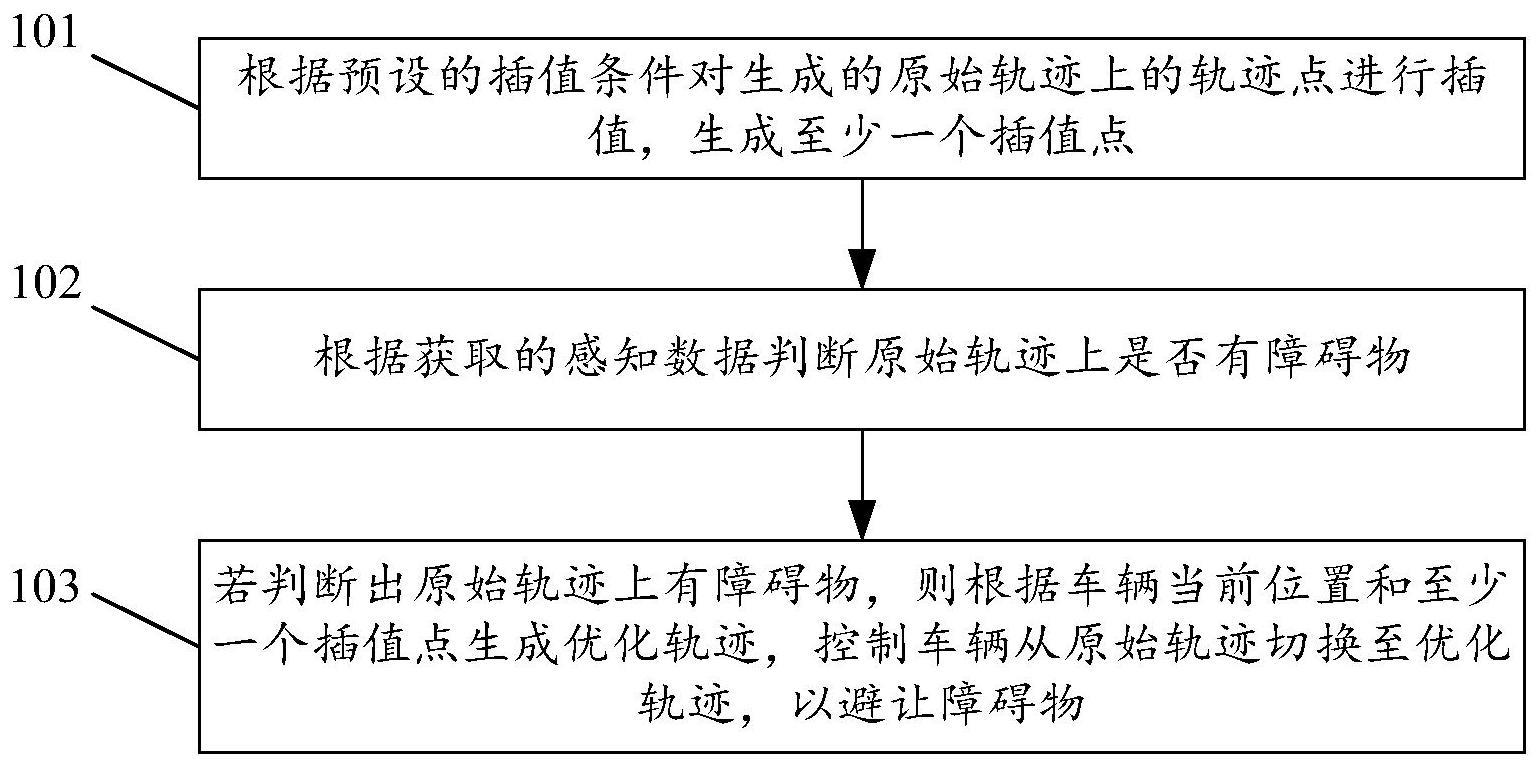
2、第一方面,本发明实施例提供了一种障碍物避让方法,根据预设的插值条件对生成的原始轨迹上的轨迹点进行插值,生成至少一个插值点;
3、根据获取的感知数据判断所述原始轨迹上是否有障碍物;
4、若判断出所述原始轨迹上有障碍物,则根据车辆当前位置和所述至少一个插值点生成优化轨迹,控制车辆从所述原始轨迹切换至所述优化轨迹,以避让所述障碍物。
5、在一种可能的实现方式中,所述插值条件包括左插值条件和右插值条件;
6、所述根据预设的插值条件对生成的原始轨迹上的轨迹点进行插值,生成至少一个插值点,包括:
7、判断原始轨迹上的每个轨迹点是否满足左插值条件且判断原始轨迹上的每个轨迹点是否满足右插值条件;
8、若判断出所述轨迹点满足至少一个插值条件,则生成所述轨迹点对应的至少一个插值点;
9、若判断出所述轨迹点不满足左插值条件,且判断出所述轨迹点不满足右插值条件,则不生成所述轨迹点对应的插值点。
10、在一种可能的实现方式中,所述插值点包括左插值点和右插值点;
11、所述若判断出所述轨迹点满足至少一个插值条件,则生成所述轨迹点对应的至少一个插值点,包括:
12、若判断出所述轨迹点满足左插值条件,且判断出所述轨迹点满足右插值条件,则生成所述轨迹点对应的左插值点和右插值点;
13、若判断出所述轨迹点满足左插值条件,且判断出所述轨迹点不满足右插值条件,则生成所述轨迹点对应的左插值点;
14、若判断出所述轨迹点不满足左插值条件,且判断出所述轨迹点满足右插值条件,则生成所述轨迹点对应的右插值点。
15、在一种可能的实现方式中,所述左插值条件包括所述轨迹点的横坐标值与左插值点的横坐标值之差的绝对值大于第一预设阈值,且轨迹点左侧路沿的横坐标值与所述左插值点的横坐标值之差的绝对值大于第二预设阈值;
16、所述右插值条件包括所述轨迹点的横坐标值与右插值点的横坐标值之差的绝对值大于第三预设阈值,且轨迹点右侧路沿的横坐标值与所述右插值点的横坐标值之差的绝对值大于第二预设阈值。
17、在一种可能的实现方式中,所述感知数据包括车辆周围的图像数据、车辆周围的视频数据、车辆周围的点云数据中至少一个。
18、在一种可能的实现方式中,所述方法还包括:
19、若判断出所述原始轨迹上没有障碍物,则控制车辆在所述原始轨迹上继续行驶。
20、第二方面,本发明实施例提供了一种障碍物避让装置,所述装置包括:
21、插值模块,用于根据预设的插值条件对生成的原始轨迹上的轨迹点进行插值,生成至少一个插值点;
22、判断模块,用于根据获取的感知数据判断所述原始轨迹上是否有障碍物;
23、避障模块,用于若判断出所述原始轨迹上有障碍物,则根据车辆当前位置和所述至少一个插值点生成优化轨迹,控制车辆从所述原始轨迹切换至所述优化轨迹,以避让所述障碍物。
24、第三方面,本发明实施例提供了一种域控制器,包括:
25、一个或多个处理器;存储器;以及一个或多个计算机程序,其中所述一个或多个计算机程序被存储在所述存储器中,所述一个或多个计算机程序包括指令,当所述指令被所述设备执行时,使得所述设备执行第一方面或第一方面任一可能的实现方式中的障碍物避让方法。
26、第四方面,本发明实施例提供了一种车辆,所述车辆包括域控制器;
27、所述域控制器用于根据预设的插值条件对生成的原始轨迹上的轨迹点进行插值,生成至少一个插值点;根据获取的感知数据判断所述原始轨迹上是否有障碍物;若判断出所述原始轨迹上有障碍物,则根据车辆当前位置和所述至少一个插值点生成优化轨迹,控制车辆从所述原始轨迹切换至所述优化轨迹,以避让所述障碍物。
28、第五方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行第一方面或第一方面任一可能的实现方式中的障碍物避让方法。
29、本发明实施例提供的技术方案中,根据预设的插值条件对生成的原始轨迹上的轨迹点进行插值,生成至少一个插值点;根据获取的感知数据判断原始轨迹上是否有障碍物;若判断出原始轨迹上有障碍物,则根据车辆当前位置和至少一个插值点生成优化轨迹,控制车辆从原始轨迹切换至优化轨迹,以避让障碍物。本发明实施例提供的技术方案中,可以满足自动驾驶车辆的避障需求,可以应用于更多复杂多变的自动驾驶场景,提高了自动驾驶车辆的灵活性。
技术特征:
1.一种障碍物避让方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述插值条件包括左插值条件和右插值条件;
3.根据权利要求2所述的方法,其特征在于,所述插值点包括左插值点和右插值点;
4.根据权利要求3所述的方法,其特征在于,
5.根据权利要求1所述的方法,其特征在于,所述感知数据包括车辆周围的图像数据、车辆周围的视频数据、车辆周围的点云数据中至少一个。
6.根据权利要求1所述的方法,其特征在于,所述方法还包括:
7.一种障碍物避让装置,其特征在于,所述装置包括:
8.一种域控制器,其特征在于,包括:一个或多个处理器;存储器;以及一个或多个计算机程序,其中所述一个或多个计算机程序被存储在所述存储器中,所述一个或多个计算机程序包括指令,当所述指令被所述域控制器执行时,使得dd225429i
9.一种车辆,其特征在于,所述车辆包括域控制器;
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行权利要求1至6中任一项所述的障碍物避让方法。
技术总结
本发明实施例提供了一种障碍物避让方法、装置、域控制器和存储介质。该方法包括:根据预设的插值条件对生成的原始轨迹上的轨迹点进行插值,生成至少一个插值点;根据获取的感知数据判断原始轨迹上是否有障碍物;若判断出原始轨迹上有障碍物,则根据车辆当前位置和至少一个插值点生成优化轨迹,控制车辆从原始轨迹切换至优化轨迹,以避让障碍物。本发明实施例提供的技术方案中,可以满足自动驾驶车辆的避障需求,可以应用于更多复杂多变的自动驾驶场景,提高了自动驾驶车辆的灵活性。
技术研发人员:余志坤,谢红志,练朝春,李善才
受保护的技术使用者:上汽通用五菱汽车股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!