本发明涉及随动测试,特别是涉及一种三维旋转机构的随动性能检验方法及系统。
背景技术:
1、三维旋转机构作为能够实现方位角和高度角调整的结构,广泛应用于需要目标瞄准的装置或系统中,而且三维旋转机构的随动性能为决定该三维旋转机构应用选择的重要指标,同时也是确定该三维旋转机构是否故障的重要参考指标,因此如何实现三维旋转机构的随动性能的检验成为一个亟待解决的技术问题。
技术实现思路
1、本发明的目的是提供一种三维旋转机构的随动性能检验方法及系统,以实现三维旋转机构的随动性能的检验。
2、为实现上述目的,本发明提供了如下方案:
3、一种三维旋转机构的随动性能检验方法,所述三维旋转机构包括旋转底座、俯仰机构、旋转驱动装置、俯仰驱动装置和控制器,所述俯仰机构的一端通过所述俯仰驱动装置设置在所述旋转底座上,所述俯仰机构的另一端用于安装调节对象,所述旋转驱动装置设置在所述旋转底座的下部,所述控制器分别与所述旋转驱动装置的控制端和所述俯仰驱动装置的控制端连接;所述检验方法包括如下步骤:
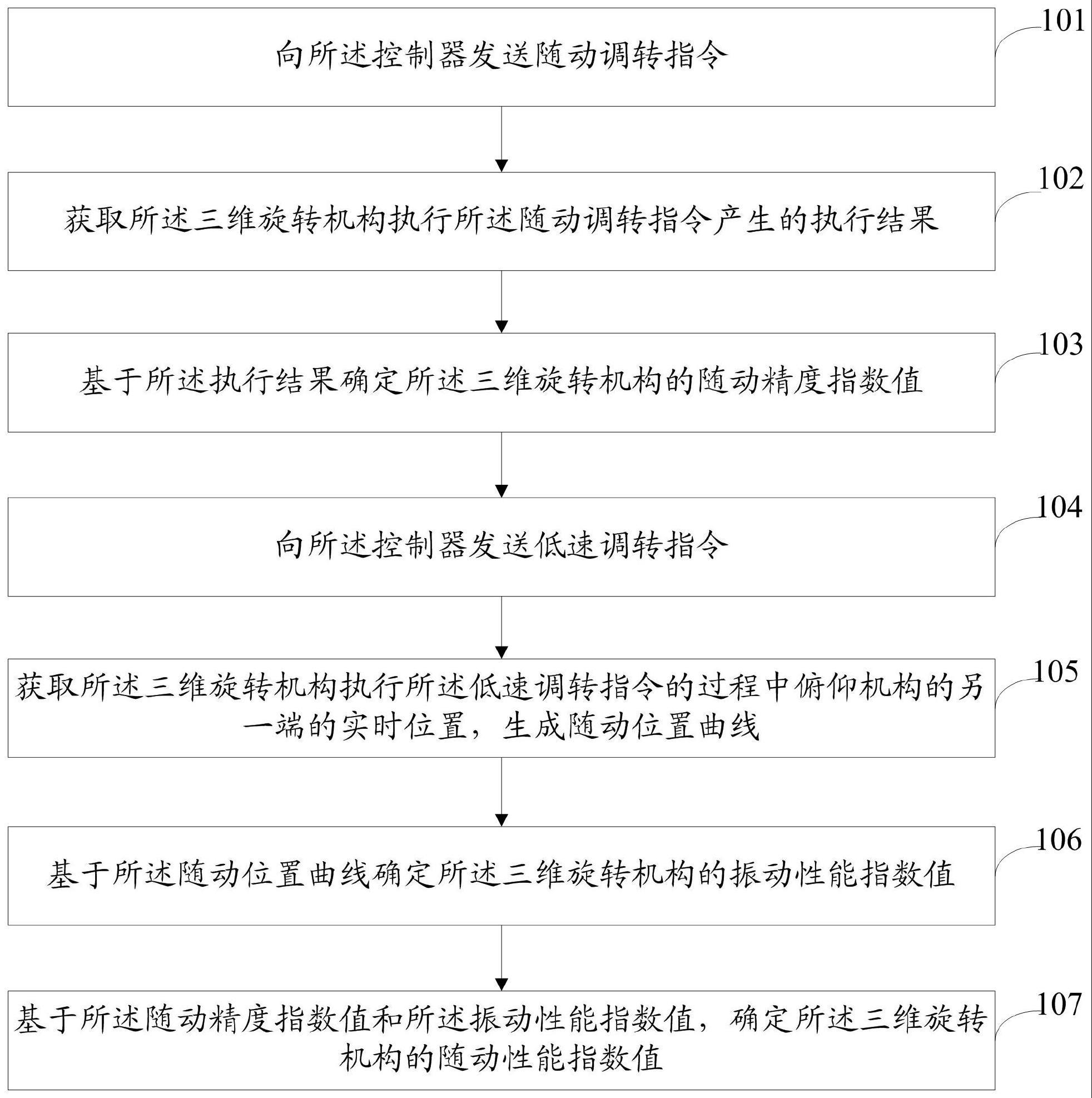
4、向所述控制器发送随动调转指令;
5、获取所述三维旋转机构执行所述随动调转指令产生的执行结果;
6、基于所述执行结果确定所述三维旋转机构的随动精度指数值;
7、向所述控制器发送低速调转指令;
8、获取所述三维旋转机构执行所述低速调转指令的过程中俯仰机构的另一端的实时位置,生成随动位置曲线;
9、基于所述随动位置曲线确定所述三维旋转机构的振动性能指数值;
10、基于所述随动精度指数值和所述振动性能指数值,确定所述三维旋转机构的随动性能指数值。
11、可选的,所述随动调转指令包括:目标位置和调转方式,所述调转方式为等速调转或沿预设轨迹调转,所述预设轨迹为在球面上的弧形或正弦形。
12、可选的,所述执行结果包括:方位角随动差、高度角随动差和调转至目标位置所用的时间。
13、可选的,基于所述执行结果确定所述三维旋转机构的随动精度指数值的公式为:
14、
15、其中,f为随动精度指数值,δθ为方位角随动差,θ为目标位置相对于初始位置的方位角,为高度角随动差,为目标位置相对于初始位置的高度角,t为调转至目标位置所用的时间,a、b、c均为常数。
16、可选的,低速调转指令为关于时间和位置的目标位置曲线。
17、可选的,基于所述随动位置曲线确定所述三维旋转机构的振动性能指数值的公式为:
18、
19、其中,g为振动性能指数值,i为随动位置曲线上极值点的数量;si为随动位置曲线上第i个极值点的位置坐标;li为与随动位置曲线上第i个极值点对应的目标位置曲线上点的位置坐标。
20、可选的,基于所述随动精度指数值和所述振动性能指数值,确定所述三维旋转机构的随动性能指数值的公式为:
21、m=af+b/g;
22、其中,m为随动性能指数值,f为随动精度指数值,g为振动性能指数值,a和b均为常数。
23、一种三维旋转机构的随动性能检验系统,所述检验系统应用于上述的检验方法,所述检验系统包括:
24、随动调转指令发送模块,用于向三维旋转机构的控制器发送随动调转指令;
25、执行结果获取模块,用于获取所述三维旋转机构执行所述随动调转指令产生的执行结果;
26、随动精度指数值确定模块,用于基于所述执行结果确定所述三维旋转机构的随动精度指数值;
27、低速调转指令发送模块,用于向所述控制器发送低速调转指令;
28、随动位置曲线获取模块,用于获取所述三维旋转机构执行所述低速调转指令的过程中俯仰机构的另一端的实时位置,生成随动位置曲线;
29、振动性能指数值确定模块,用于基于所述随动位置曲线确定所述三维旋转机构的振动性能指数值;
30、随动性能指数值确定模块,用于基于所述随动精度指数值和所述振动性能指数值,确定所述三维旋转机构的随动性能指数值。
31、一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述的检验方法。
32、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被执行时实现上述的检验方法。
33、根据本发明提供的具体实施例,本发明公开了以下技术效果:
34、本发明公开一种三维旋转机构的随动性能检验方法及系统,所述检验方法包括如下步骤:向所述控制器发送随动调转指令;获取所述三维旋转机构执行所述随动调转指令产生的执行结果;基于所述执行结果确定所述三维旋转机构的随动精度指数值;向所述控制器发送低速调转指令;获取所述三维旋转机构执行所述低速调转指令的过程中俯仰机构的另一端的实时位置,生成随动位置曲线;基于所述随动位置曲线确定所述三维旋转机构的振动性能指数值;基于所述随动精度指数值和所述振动性能指数值,确定所述三维旋转机构的随动性能指数值。本发明从随动精度和随动过程中产生的振动两个方面实现了三维旋转机构的随动性能的检验。
技术特征:1.一种三维旋转机构的随动性能检验方法,其特征在于,所述三维旋转机构包括旋转底座、俯仰机构、旋转驱动装置、俯仰驱动装置和控制器,所述俯仰机构的一端通过所述俯仰驱动装置设置在所述旋转底座上,所述俯仰机构的另一端用于安装调节对象,所述旋转驱动装置设置在所述旋转底座的下部,所述控制器分别与所述旋转驱动装置的控制端和所述俯仰驱动装置的控制端连接;所述检验方法包括如下步骤:
2.根据权利要求1所述的三维旋转机构的随动性能检验方法,其特征在于,所述随动调转指令包括:目标位置和调转方式,所述调转方式为等速调转或沿预设轨迹调转,所述预设轨迹为在球面上的弧形或正弦形。
3.根据权利要求1所述的三维旋转机构的随动性能检验方法,其特征在于,所述执行结果包括:方位角随动差、高度角随动差和调转至目标位置所用的时间。
4.根据权利要求1所述的三维旋转机构的随动性能检验方法,其特征在于,基于所述执行结果确定所述三维旋转机构的随动精度指数值的公式为:
5.根据权利要求1所述的三维旋转机构的随动性能检验方法,其特征在于,低速调转指令为关于时间和位置的目标位置曲线。
6.根据权利要求1所述的三维旋转机构的随动性能检验方法,其特征在于,基于所述随动位置曲线确定所述三维旋转机构的振动性能指数值的公式为:
7.根据权利要求1所述的三维旋转机构的随动性能检验方法,其特征在于,基于所述随动精度指数值和所述振动性能指数值,确定所述三维旋转机构的随动性能指数值的公式为:
8.一种三维旋转机构的随动性能检验系统,其特征在于,所述检验系统应用于权利要求1-7任一项所述的检验方法,所述检验系统包括:
9.一种电子设备,其特征在于,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述的检验方法。
10.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,所述计算机程序被执行时实现如权利要求1至7中任一项所述的检验方法。
技术总结本发明公开一种三维旋转机构的随动性能检验方法及系统,所述检验方法包括如下步骤:向所述控制器发送随动调转指令;获取所述三维旋转机构执行所述随动调转指令产生的执行结果;基于所述执行结果确定所述三维旋转机构的随动精度指数值;向所述控制器发送低速调转指令;获取所述三维旋转机构执行所述低速调转指令的过程中俯仰机构的另一端的实时位置,生成随动位置曲线;基于所述随动位置曲线确定所述三维旋转机构的振动性能指数值;基于所述随动精度指数值和所述振动性能指数值,确定所述三维旋转机构的随动性能指数值。本发明从随动精度和随动过程中产生的振动两个方面实现了三维旋转机构的随动性能的检验。
技术研发人员:李洪涛,时维科,何洋,卢鑫,冯楠,刘志伟,朱逸冰,卢小冬,宋洁,张远,单时卓,王悦
受保护的技术使用者:中国人民解放军92941部队
技术研发日:技术公布日:2024/1/14