物流移动机器人的运动控制器及系统的制作方法
本发明涉物流智能控制的,具体涉及一种物流移动机器人的运动控制器及系统。
背景技术:
1、目前,智能机器人在物流的仓储与分拣环节已经崭露头角,在部分物流企业获得了应用,正在向运输配送环节逐步转移。智能移动机器人具有智能选择路径,自主定位导航,智能避障,智能调速,位置、速度实时上传等功能。智能移动机器人应用于自主物流系统中的末端配送,可以提高现代物流的效率,防止交通意外和交通堵塞的发生,使人们更有效地利用时间、改善生活条件。机器人采用电池驱动,用电量很低,可实现“绿色物流”。
2、目前国内移动机器人运动控制系统主要采用模块化方式,其存在不足之处:集成化程度低,外围线路较多,结构复杂等,因此物流移动机器人的运动控制器的集成化、稳定性、易用性有待进一步优化和提升。
技术实现思路
1、针对现有技术中所存在的不足,本发明提供了一种物流移动机器人的运动控制器及系统,以解决现有技术中物流移动机器人的运动控制器的集成化、稳定性、易用性有待进一步优化和提升的问题。
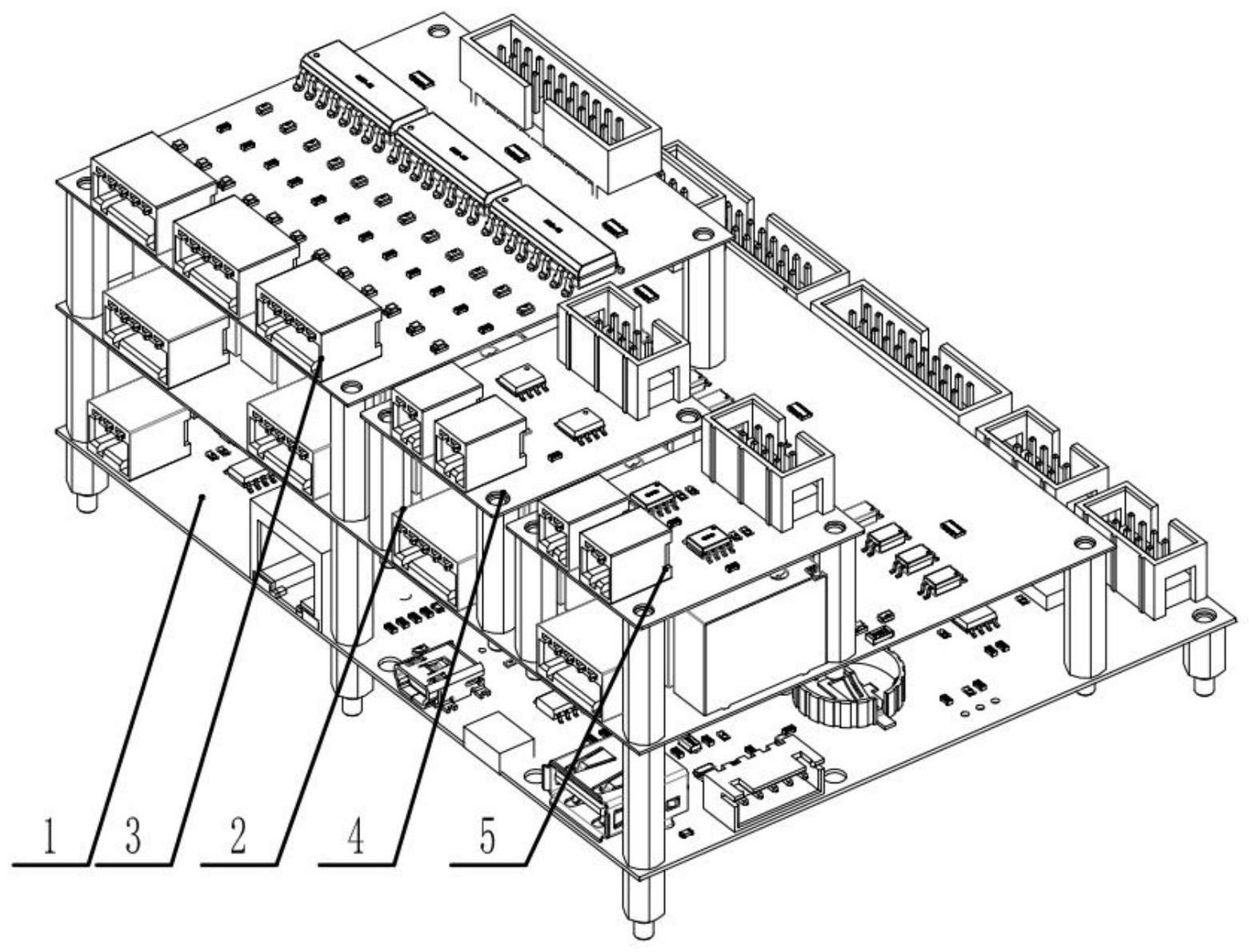
2、本发明提供了一种物流移动机器人的运动控制器,包括支撑架,还包括:
3、cpu核心板,设于所述支撑架的底部,用于工业物流移动机器人的总体控制;
4、输入信号控制板,设于所述支撑架的顶部且通信连接所述cpu核心板,用于接收外部开关以及传感器信号;
5、输出信号控制板,设于所述支撑架的中部且通信连接所述cpu核心板,用于所述运动控制器的输出信号控制;
6、rs485通信控制板,设于所述支撑架的顶部且连接所述cpu核心板,用于控制rs485的modbus协议的外部设备;
7、can通信控制板,设于所述支撑架的顶部且连接所述cpu核心板,用于控制can通讯网络的外部设备;
8、独立电源,靠近所述cpu核心板设于所述支撑板的底部,用于为cpu核心板、输入信号控制板、输出信号控制板、rs485通信控制板及can通信控制板提供电源。
9、可选地,所述输入信号控制板,包括:
10、输入接口端、mcu、隔离ic芯片及独立电源;
11、所述输入接口端的输入端连接pnp或npn的传感器,所述输入接口的输出端连接所述mcu,所述mcu和所述传感器均通过所述隔离ic芯片连接所述独立电源。
12、可选地,所述输入信号控制板,还包括:
13、双极性led,所述双极性led的一端连接所述pnp或npn的传感器,所述双极性led的另一端连接所述mcu。
14、本发明还提供了一种物流移动机器人的运动控制器的系统,包括:
15、主控制模块,用于所述运动控制器的系统的总体控制;
16、通讯传输模块,连接所述主控制模块,用于传输所述主控制模块的控制指令;
17、命令收发模块,连接所述主控制模块,用于下发所述主控制模块的设置参数,用于上传传感器、电池及电机的实时参数;
18、两轮差速底盘运动分解模块,通过所述通讯传输模块连接所述主控制模块,用于根据所述主控制模块的指令,基于物流移动机器人的底盘参数,实时控制移动机器人的移动的方向、线速度、角速度、托盘旋转的角度和顶升高度。
19、可选地,还包括:
20、外部采集信息模块,通过所述通讯传输模块连接所述主控制模块,用于采集电池信息、电机状态信息、急停按钮信号、模式切换信号、上升按钮信号、下降按钮信号、避障雷达信号的状态信息。
21、可选地,还包括:
22、里程换算模块,通过所述通讯传输模块连接所述主控制模块,用于根据所述移动机器人的电机编码器脉冲值、减速机的速比、agv驱动轮的半径、机械误差补偿值,将电机编码器脉冲值转化为驱动轮的里程值。
23、可选地,还包括:
24、速度解算模块,通过所述通讯传输模块连接所述主控制模块,用于根据主控制模块下发速度解算成输出左轮和右轮的线速度,并换算为转速,将结果分解为驱动器协议规定的数据下发至驱动器目标速度地址。
25、相比于现有技术,本发明具有如下有益效果:
26、本发明采用集成化设计减少由于多个开关电源布局增大其所占的布局空间,减少外部的电源布线,降低线路复杂带来的故障;整体的体积小、驱动能力高、集成度高、易扩展、可靠性高,使得整体的运行稳定。
技术特征:
1.一种物流移动机器人的运动控制器,包括支撑架,其特征在于,还包括:
2.如权利要求1所述的物流移动机器人的运动控制器,其特征在于,所述输入信号控制板,包括:
3.如权利要求2所述的物流移动机器人的运动控制器,其特征在于,所述输入信号控制板,还包括:
4.一种物流移动机器人的运动控制器的系统,其特征在于,包括:
5.如权利要求4所述的物流移动机器人的运动控制器的系统,其特征在于,还包括:
6.如权利要求5所述的物流移动机器人的运动控制器的系统,其特征在于,还包括:
7.如权利要求6所述的物流移动机器人的运动控制器的系统,其特征在于,还包括:
技术总结
本发明提供了一种物流移动机器人的运动控制器,包括支撑架,还包括CPU核心板,设于所述支撑架的底部;输入信号控制板,设于所述支撑架的顶部且通信连接所述CPU核心板;输出信号控制板,设于所述支撑架的中部且通信连接所述CPU核心板;RS485通信控制板,设于所述支撑架的顶部且连接所述CPU核心板;CAN通信控制板,设于所述支撑架的顶部且连接所述CPU核心板;独立电源,靠近所述CPU核心板设于所述支撑板的底部,本发明采用集成化设计减少由于多个开关电源布局增大其所占的布局空间,减少外部的电源布线,降低线路复杂带来的故障;整体的体积小、驱动能力高、集成度高、易扩展、可靠性高,使得整体的运行稳定。
技术研发人员:邬传浪,葛景国
受保护的技术使用者:重庆长安民生物流股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!